可旋转的医疗装置的制作方法
可旋转的医疗装置
相关申请的交叉引用
1.本技术要求于2020年2月4日提交的美国临时申请号62/969,925的优先权的权益,其通过引用整体并入本文。
技术领域
2.本发明一般涉及一种医疗装置,其包括可相对于手柄旋转的轴。本发明的至少一些实施例涉及一种医疗装置,其具有手柄的远侧部分,该手柄的远侧部分可相对于手柄的剩余部分旋转,其中手柄的远侧部分容纳轴并且联接到轴。
背景技术:
3.在某些医疗手术中,医师和/或技术人员需要控制支气管镜(或其他镜或医疗装置)和其他医疗附属装置。根据患者相对于医师位置的位置,控制装置的医师可能需要将他/她的身体扭曲和/或扭转至夸张的位置中,以将医疗装置导航至所需的解剖位置。结果,医师可能会被置于不太理想的人体工程学位置中,并且/或者手术可能会受到影响。
技术实现要素:
4.根据一个示例,一种医疗装置可以包括轴;手柄,手柄包括近侧部分和远侧部分,其中远侧部分固定到轴的近侧部分;以及通道,通道从手柄延伸至轴中,其中通道包括近侧通道和远侧通道,近侧通道可相对于远侧通道旋转并且在近侧通道的整个旋转过程中与远侧通道对齐,其中近侧部分包括近侧通道,并且远侧部分包括远侧通道,其中远侧部分可相对于手柄的近侧部分旋转,并且轴被配置为与手柄的远侧部分一起旋转。
5.在另一个示例中,轴可以围绕远侧通道的至少一部分,并且远侧通道可以被配置为与轴和手柄的远侧部分一起旋转。手柄的远侧部分可以在顺时针方向或逆时针方向上相对于手柄的近侧部分旋转。手柄的远侧部分的旋转可以受限于设定的旋转角度。手柄的远侧部分可以通过在远侧部分的表面和近侧部分的邻接表面之间生成的摩擦力而相对于手柄的近侧部分保持静止。手柄还可以包括引导件,其中引导件包括沿着引导件的中心轴线延伸的腔,并且其中腔定位在近侧通道和远侧通道之间,并且腔与近侧通道和远侧通道对齐。引导件可以固定到手柄的近侧部分的内表面。手柄的远侧部分还可以包括沿着手柄的远侧部分的内表面的支撑件,并且轴的近侧部分可以固定到支撑件。
6.在另一个示例中,一种医疗装置还可以包括具有第一形态和第二形态的锁,其中在锁的第一形态中,手柄的远侧部分相对于手柄的近侧部分静止,并且在锁的第二形态中,手柄的远侧部分可相对于手柄的近侧部分旋转。锁可以包括第一垫圈,第一垫圈包括向近侧突出的销,其中远侧通道经由第一垫圈的开口延伸通过第一垫圈;第二垫圈,第二垫圈包括多个开口,多个开口各自被配置为接收销;以及弹簧,弹簧将第一垫圈的远侧表面联接至基座。在锁的第一形态中,第一垫圈朝向第二垫圈进行弹簧偏置,使得第一垫圈的销与第二垫圈的多个开口中的一个接合,以及其中,在锁的第二形态中,第一垫圈与第二垫圈向近侧
间隔开,从而压缩弹簧,并且因此销从所有多个开口脱离。锁还可以包括管,其中管延伸通过第一垫圈和第二垫圈的开口,其中管套在远侧通道的至少一部分上,并且其中第一垫圈被配置为在管上平移。
7.在另一个示例中,医疗装置还可以包括第一转向线和保持第一转向线的第一陀螺仪,其中第一陀螺仪包括近侧陀螺仪和远侧陀螺仪,以及其中远侧陀螺仪与近侧陀螺仪互锁,使得远侧陀螺仪可相对于近侧陀螺仪围绕远侧通道或近侧通道旋转。第一转向线可以包括近侧线和远侧线,其中近侧线的远端联接到第一扩大部,并且远侧线的近端联接到第二扩大部,其中第一扩大部锚固到近侧陀螺仪,并且第二扩大部锚固到远侧陀螺仪。远侧线可以被配置为当经由致动装置拉动近侧线时被拉动。
8.根据一个示例,一种医疗装置可以包括轴;连接到轴的近侧部分的手柄;以及从手柄延伸至轴中的通道,其中通道可相对于手柄旋转,并且其中通道的侧壁包括位于容纳在手柄中的通道的一部分处的开口,其中手柄限定与通道的开口流体连通的腔,并且其中腔的近端被配置为与抽吸源流体连通。开口可以由第一密封件和第二密封件与手柄的部分密封。通道的侧壁可以包括多个周向分布的开口。
9.根据一个示例,一种定位医疗装置的轴的方法,其中医疗装置还包括手柄,所述手柄包括近侧部分和可旋转地附接到近侧部分的远侧部分;以及通道,通道从第二部分延伸至轴中,其中轴的近侧部分固定到手柄的远侧部分,该方法可以包括将医疗装置的轴的远端插入受试者的身体中,并且在插入步骤之后,相对于手柄的近侧部分旋转手柄的远侧部分、轴和通道。
10.在另一个示例中,该方法还可以包括在插入步骤之后,从手柄的近侧部分解锁手柄的远侧部分,相对于手柄的近侧部分旋转手柄的远侧部分、轴和通道,并且将手柄的远侧部分锁定至手柄的近侧部分。
附图说明
11.并入并构成本说明书的一部分的附图示出了各种示例性实施例,并且与描述一起用于解释所公开的实施例的原理。
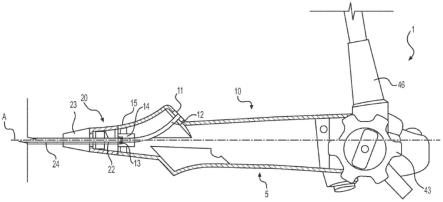
12.图1a是根据一个实施例的医疗装置的横截面视图。
13.图1b是图1a的医疗装置的手柄的远侧部分的横截面视图。
14.图2a是根据另一个实施例的医疗装置的一部分的横截面视图。
15.图2b是图2a的医疗装置的锁定机构的侧视图。
16.图2c是图2a的医疗装置的锁定机构的立体图。
17.图3a是根据一个实施例的医疗装置的可旋转陀螺仪的横截面视图。
18.图3b是包括多个图3a的可旋转陀螺仪的医疗装置的立体图。
19.图4是根据另一个实施例的医疗装置的一部分的横截面视图。
具体实施方式
20.现在将详细参考本发明的各方面,在附图中示出了其的示例。只要有可能,在所有附图中将使用相同或类似的附图标记来指代相同或相似的部分。术语“远侧”是指当将装置引入受试者(例如,患者)体内时最远离用户的部分。相反地,术语“近侧”是指当将装置放入
受试者体内时最接近用户的部分。
21.前面的一般性描述和下面的详细描述仅仅是如要求保护的特征的示例性和说明性,而不是限制性的描述。如本文所使用的,术语“包括”、“含有”、“具有”、“包含”或其其他变体旨在涵盖非排他性的内容物,以使得包括一列要素的过程、方法、物品或设备不仅仅包括那些要素,而是可以包括未明确列出或不是这种过程、方法、物品或设备所固有的其他要素。在本发明中,使用相对术语,诸如,例如“大约”、“基本上”、“大致”和“近似”来指示所述值或特性的
±
10%的可能变化。
22.本发明的实施例可以解决本领域中的限制中的一个或多个。然而,本发明的范围由所附权利要求限定,而不是由解决特定问题的能力限定。本发明涉及包括轴的医疗装置,该轴可以相对于医疗装置的手柄旋转。作为示例,医疗装置可以是具有从手柄向远侧延伸的轴的任何镜(例如,支气管镜、十二指肠镜、内窥镜、结肠镜、输尿管镜等)、导管、工具、器械等。在实施例中,医疗装置包括手柄,其具有可相对于手柄的近侧部分顺时针或逆时针旋转的远侧部分。医疗装置还包括固定地联接到手柄的远侧部分并且容纳在手柄的远侧部分内的轴。因此,当手柄的远侧部分相对于手柄的近侧部分旋转时,轴同时同样旋转。手柄的远侧部分可以处于两种状态或形态中的一种中。在第一状态中,远侧部分可以相对于手柄的近侧部分保持静止。在第二状态中,手柄的远侧部分可以相对于手柄的近侧部分旋转或能够相对于其旋转。替代地,手柄的近侧部分可以相对于该远侧部分旋转或能够相对于其旋转。根据手柄的远侧部分,医疗装置的轴旋转或保持静止。
23.本发明的医疗装置的实施例可以采用任何合适的方式,例如摩擦、锁定/解锁机构等,以将手柄的远侧部分放置或保持在上述两种状态中的一个中。此外,这种医疗装置可以为用户提供在手术中经由任何合适的方式,例如,由手、机械地、电动地等来旋转手柄的远侧部分(并且,从而旋转轴)的选项,以及相对于装置的其余部分将手柄的远侧部分保持静止在其当前旋转位置中的选项。因此,无论患者相对于该用户的位置如何,装置的用户都可以经由手柄的远侧部分和轴的旋转在预期的目标部位舒适地进入、查看和/或执行治疗/诊断手术,而无需扭转和扭曲他/她的手腕或身体的其他部分。
24.参考图1a,示出了根据一个实施例的医疗装置1,例如,支气管镜。医疗装置1包括柔性轴24(例如,导管)和连接到柔性轴24近端的手柄5。手柄5、或用于致动或控制医疗装置1的某个其他装置以及与医疗装置1相关联的任何工具或装置,包括致动装置43。致动装置43在多个方向上控制柔性轴24的铰接和/或在柔性轴24远端处的铰接接头。装置43可以是例如,可旋转旋钮,其围绕其轴线旋转以推动/拉动致动元件,例如,转向线(未示出)。致动元件,诸如适用于医疗手术(例如,医疗级塑料或金属)的线缆或线材从内医疗装置1的近端向远侧延伸并且连接至柔性轴24的远侧部分以控制其移动。替代地或另外地,用户可以独立于手柄5来操作致动元件。致动元件的远端可以延伸通过柔性轴24并且终止于柔性轴24的铰接接头和/或远侧顶端。例如,一个或多个致动元件可以连接到铰接接头,并且致动元件的致动可以控制柔性轴24的铰接接头或远端以在多个方向上移动(例如,上/下和/或左/右)。
25.另外,一根或多根线缆(未示出)可以从医疗装置1的近端延伸到柔性轴24的远端,并且可以为在柔性轴24的远端处的成像、照明和/或其他电气装置提供电气控制,并且可以从柔性轴24的远端向近侧传输成像信号以进行处理和/或显示在显示器上。手柄5还可以包
括端口11、46,以用于从患者引入和/或移除工具、流体或其他材料。端口11可以用于经由工作通道12引入工具。端口46可以连接到用于引入流体、抽吸和/或用于电子部件的布线的脐管。此外,医疗装置1还可以包括附接到手柄5的远端的应变消除件23。应变消除件23可以是任何合适的软材料的覆盖件,其向远侧成锥形并且在其远端处具有用于轴24的开口。应变消除件23不受特别限制,并且可以有助于防止轴24扭结。
26.参考图1a和1b,下面进一步详细地讨论手柄5。手柄5包括近侧部分10和可旋转的远侧部分20。远侧部分20是与近侧部分10离散的单独部件。因此,在一些实施例中,手柄5不是单件,而是两个不同的件,近侧部分10和远侧部分20。远侧部分20可旋转地附接到近侧部分10,使得部分10和20彼此相邻。
27.近侧部分10可以是任何合适的形状,其被配置为由用户处理或抓握,并且还可以是任何合适的材料,例如塑料、钢等。近侧部分10包括上面讨论的致动装置43和端口46、11。如上所述,近侧部分10可以是手柄5的部分,其被配置为经由端口46和11连接到附加接线和工具。端口11可以通向近侧工作通道12,各种工具可以通过该近侧工作通道12引入。
28.近侧工作通道12可以是任何合适的形式,并且不受特别限制。例如,在一些实施例中,近侧工作通道12可以是管,其联接到端口11并且是柔性的和/或形状被设定以适应近侧部分10的形状。在其他实施例中,可以在近侧部分10内模制中空的管状通道以形成近侧工作通道12,其可以是任何合适的材料,例如塑料、钢等。通道12可以是任何合适的直径或长度。通道12的远侧部分转换至引导件14的腔14’。引导件14可以与通道12一起模制,作为整体单元。引导件14的形状是管状/圆柱形并且包括腔14'。腔14’沿着引导件14的中心轴线延伸。腔14’具有等于或约等于通道12直径的直径。引导件14可以是经由从近侧部分10的内表面延伸至引导件14的支撑件15锚固在近侧部分19内的模制特征。支撑件15也可以是插入近侧部分10内的模制特征或支撑件。支撑件15还可以包括合适的开口或通道以允许任何线材和/或抽吸管或冲洗配管穿过支撑件15并且朝向轴24的远端。而且,装置1还可以限定在部分10和20之间的空间以允许相同的情况。
29.引导件14和腔14’用作近侧部分10的通道12的远端和远侧部分20的远侧工作通道22的近端之间的转换。引导件14的远端包括圆形空隙或凹部16以容纳密封环13。环13(例如,o形环)装配在远侧工作通道22的周围。因此,在环13内的空间的直径可以是与工作通道22的外径相同或大致相同的直径。然而,环13装配在通道22的周围,使得通道22仍可以在环13内旋转。替代地,环13和通道22可以在凹部16内一起旋转。环13可以是允许其围绕远侧通道22密封并且提供通道22的近端在引导件14的凹部16内居中的任何合适的材料。因此,鉴于上述情况,近侧通道12、腔14’和远侧通道22保持直接对齐,没有任何偏移。
30.远侧部分20包括远侧工作通道22的近侧部分。如近侧通道12一样,远侧工作通道22可以具有任何合适的形式。例如,通道22可以是从如上所述的引导件14的腔14’的端部延伸至轴24的远端的管。无论形式如何,通道22的直径与通道12相同或大致相同。在其他实施例中,通道22的直径可以小于或大于通道12的直径。此外,如上面所讨论的,近侧通道12通向腔14’并且与其流体连通,腔14’通向远侧通道22并且与其流体连通。
31.远侧部分20还包括轴24的近侧部分和夹具26。轴24可以是任何合适长度的配管,其包含远侧工作通道22的至少一部分或全部,并且从远侧部分20延伸至医疗装置1的远端。轴24可以是柔性的任何合适材料的配管。轴24的直径不受特别限制,只要该直径可以适应
远侧工作通道22和任何期望的线材、抽吸/冲洗配管等。夹具26是圆形夹具/开口,其被模制成远侧部分20的一部分。夹具26被配置为保持/夹住轴24的近侧部分,使得轴24固定到远侧部分20。鉴于这种形态,夹具26的开口具有与轴24的外径相同或大致相同的直径。可以使用用于将夹具26固定到轴24的附加方式,包括粘合剂、焊接等。因此,轴24的近侧部分固定地夹紧至远侧部分20,使得当远侧手柄部分20相对于近侧手柄部分10顺时针或逆时针旋转时,轴24(和工作通道22)旋转。远侧工作通道22的至少一部分可以固定到轴24(经由粘合剂、焊接等),因此其可以同时旋转。
32.如上所述,远侧部分20可旋转地附接到近侧部分10。部分10、20彼此邻接并且彼此齐平。部分10、20的邻接端是圆形的并且具有相同的直径。远侧部分20可旋转地附接到近侧部分10的方式不受特别限制,并且两个部分10、20可以包括任何合适的联接部件/元件(未示出)。例如,远侧部分20的近侧表面可以经由防止部分10和20分离的锚固件/狭槽联接机构与近侧部分10的远侧表面接合。在这样的示例中,近侧部分10的远侧表面可以具有在整个该远侧表面周向延伸的凹部,并且远侧部分10的近侧表面可以具有向近侧突出的部件/特征,其被配置为牢固地在该凹部内开槽。在替代示例中,近侧部分10的远侧表面可以具有向远侧突出的特征,而远侧部分20的近侧表面则包括凹部。然而,远侧部分20和近侧部分10之间的附接不限于所描述的,并且可以采用其他合适的方式。
33.远侧部分20也可以附接到近侧部分10,使得远侧部分20相对于近侧部分10的旋转度数受到限制,例如,为约90
°
、120
°
、180
°
等。因此,在这样的示例中,远侧部分20和近侧部分10的联接部件可以包括用于限制远侧部分20的旋转的附加装置。例如,止动件可以定位在先前讨论的凹部内的预定或选定位置处,从而由于在突出特征和止动件之间的接触而阻止远侧部分20旋转经过该止动件。然而,再一次地,联接装置不限于所述的,并且可以采用其他合适的部件/特征来限制部分20的向远侧的旋转度数。
34.远侧部分20和工作通道22围绕远侧工作通道22的中心轴线a旋转。因此,通道22在远侧部分20的整个旋转过程中保持与腔14和近侧通道12的直接对齐。因此,当远侧通道22相对于近侧通道12旋转(通过远侧部分20的旋转实现)时,延伸通过两个通道12和22的附属装置或工具受到保护以免受到任何损坏,例如,挤压。
35.如上面所讨论的,远侧部分20可以相对于近侧部分10保持在静止状态或形态中。为了保持静止,远侧部分20或至少远侧部分20的邻接近侧部分10的表面可以是任何合适的摩擦材料,从而在邻接近侧部分10的同时阻止远侧部分20的不期望的移动。为了增强两个部分10和20之间的摩擦,近侧部分10或至少近侧部分10的邻接远侧部分20的表面也可以是任何合适的摩擦材料。在远侧部分20和近侧部分10之间生成的摩擦力可以具有足够的程度以阻止远侧部分20相对于近侧部分10的不期望的旋转。然而,该摩擦力可能不会大于由医疗装置1的用户施加的普通扭转力,使得远侧部分20可以根据需要由该用户旋转。
36.参考图1a至1b,下面进一步讨论了可以如何使用医疗装置1的示例。医疗装置1的轴24的远端可以被输送至受试者的体内,邻近预期的目标部位。可以经由自然身体孔口,诸如嘴、鼻子、肛门等进行输送。经由任何合适的图像处理装置进行的与医疗装置1相关联的成像可以帮助定位轴24的远端。根据受试者和/或预期目标部位相对于医疗装置1和/或医疗装置1的用户的位置,用户可以选择相对于手柄5旋转轴24。为了旋转轴24,用户可以通过施加大于在部分10和20之间的摩擦力的扭转力来相对于近侧部分10旋转手柄5的远侧部分
20。用户可以旋转远侧部分20(和轴24),以允许用户在更符合人体工学的位置中或出于各种其他原因来处理手柄5。因此,用户可以相对于另一个来将轴24(经由远侧部分20的旋转进行)或手柄5的近侧部分10旋转至任何所需的程度。
37.如图2a所示的医疗装置1’在许多方面类似于装置1。相同的附图标记指代相同的零件。下面将描述在装置1和装置1’之间的差异。装置1’还包括锁。锁30可以包括其中远侧部分20和轴24可以相对于近侧部分10在任何方向(顺时针或逆时针)上自由旋转的形态(例如,锁定形态),以及其中远侧部分20和轴24保持静止并且不可相对于近侧部分10旋转的另一个形态(例如,解锁形态)。参考图2a至2c,锁30包括具有锁定销32的可滑动锁定垫圈31、被配置为与锁定垫圈31和销32接合的接收垫圈33、基座垫圈34和将锁定垫圈31联接至基座垫圈34的弹簧35。锁30被定位成使得其在引导件14的远侧,并且通道22沿着垫圈31、33和34的轴线延伸通过中心开口。锁30还包括中心管40,其也沿着垫圈31和33的轴线延伸通过中心开口。管40是中空的,并且套在从引导件14延伸到垫圈34的通道22的部分上。因此,管40的一部分被套在引导件14的凹部16内。管40可以固定到垫圈31,使得管40可以与垫圈31一起旋转或线性滑动,如下文进一步描述。然而,管40可以不固定到垫圈33,使得管40可以相对于垫圈33旋转和线性滑动。管40的远端固定到垫圈34。
38.锁定垫圈31的形状为圆形/盘状,但不限于此。垫圈31的尺寸不受特别限制,只要其可以固定在远侧部分20内即可。锁定垫圈31可以经由中心开口装配在管40的周围,使得垫圈31能够在管40上线性滑动。锁定垫圈31包括锁定销32,其可以是向近侧突出的销。销位于垫圈31的近侧表面,在该处,销32可以接合接收垫圈33的接收孔36中的一个(下文进一步详细描述)。销31的长度和直径不受特别限制,只要销32可以与该接收孔36接合即可。类似地,垫圈33的形状也为圆形/盘状,但不限于此。在装置1’中,垫圈33的直径小于垫圈31。然而,垫圈33的尺寸,例如,直径,不受特别限制。垫圈33可以经由垫圈33的中心开口装配在管40的周围,使得管40可以相对于垫圈33和近侧部分10围绕其中心轴线滑动和/或旋转。在垫圈31近侧且邻近垫圈31的垫圈33在其远侧表面上包括多个接收孔36。孔36可以完全延伸通过垫圈33的厚度或部分通过垫圈33(例如,作为凹部)。孔36可以具有容纳垫圈31的销32的形状和宽度/直径。接收孔36可以围绕垫圈33的中心点周向且均匀地分布。接收孔36的数量不受特别限制。基座垫圈33的形状也为圆形/盘状,但不限于此。垫圈33的尺寸也不受特别限制,只要其可以固定在远侧部分20内即可。在装置1'中,垫圈33的近侧表面的一部分固定到位于远侧部分20内的引导件14的远端。因此,垫圈33不会与远侧手柄部分20一起旋转。然而,垫圈33不限于固定到引导件14的远端。垫圈33也可以固定到近侧部分10内的其他部分或部件,使得垫圈33不会与远侧部分20一起旋转。垫圈34在锁定垫圈31的远侧并且因此是锁30的最远端。弹簧35定位在垫圈34和锁定垫圈31之间,这是因为其将垫圈34的近侧表面联接到锁定垫圈31的远侧表面。垫圈34的远侧表面固定到夹具26的近侧表面。因此,垫圈34可以用作固定基座,锁定垫圈31可以从固定基座经由弹簧34的压缩或延伸在管40上线性滑动。垫圈34和31以及弹簧35将与远侧手柄部分20一起旋转。
39.如上面所讨论的,垫圈31的远侧表面经由弹簧34联接到基座垫圈33。结果,远侧部分20的垫圈31可以被弹簧偏置以经由销32和孔36中的一个与垫圈33接合。如前所述,垫圈33固定到引导件14,引导件14经由支撑件15锚固到近侧部分10。因此,锁30可以默认为在锁定形态中,从而阻止远侧部分20(和轴24)或近侧部分10相对于另一个的任何旋转。
40.为了将锁30从其默认的锁定形态转换为解锁形态(图2a所示),则可以向远侧施加拉动远侧部分20的力(如由方向箭头所示)。在远侧部分20和近侧部分10之间的连接允许沿着轴线a在其之间进行一些相对平移。这由在远侧部分20和近侧部分10之间的间隙所示,同时锁30处于解锁形态中。例如,上面提到的近侧部分10和远侧部分20的突出部分和凹部或面向的表面(未示出)可以被配置为允许相对平移。拉力使锁定垫圈31从近侧部分10的接收垫圈33脱离。垫圈31的销32缩回到垫圈31的开口36中的一个的外部。可以经由任何合适的方式,例如,由手、机械地、电动地等来施加拉力。当脱离时,远侧部分20(和固定到部分20的轴24)或近侧部分10可以相对于另一个顺时针或逆时针地自由旋转。施加的力的释放可以将锁定垫圈31恢复到其与垫圈33邻接并接合的初始位置。如果垫圈31由于销32与垫圈33的孔36中的一个之间的失准而未能与垫圈33接合,则可能发生进一步的旋转,直到建立对齐和接合。
41.医疗装置1'可以以与医疗装置1类似的方式使用,除了用户可以向远侧拉动远侧部分20以解锁锁30,相对于另一个旋转远侧部分20(和轴24)或近侧部分10至所需的程度,并且释放远侧部分20以将锁30恢复至锁定形态。
42.图3a示出了可以包括在医疗装置实施例中的可旋转陀螺仪50,其包括上述的装置1、1’。如图所示,可旋转陀螺仪50围绕引导件14和工作通道22的一部分,并且还保持转向线60。陀螺仪50可以装配在腔14’和工作通道22相接的区域周围。然而,陀螺仪50不限于这样的位置,并且还可以装配在例如,在近侧部分10内的引导件14的部分周围。此外,应当注意,陀螺仪50和锁30在医疗装置手柄中的存在不是相互排斥的。在一些示例中,手柄可以包括装配在引导件14和通道22周围的陀螺仪50,并且锁30也装配在通道22周围。
43.传统医疗装置(例如,镜)的每根转向线是从手柄至轴的远端的单件。然而,在旋转轴的同时,这种转向线的旋转可能由于源于旋转的扭转而导致对转向线的损坏。为了解决这样的问题,如上所述,转向线60是两条分开的分离线,即近侧线61和远侧线63,以帮助实现远侧部分20(和轴24)的旋转,而不损坏转向线60。近侧线61的近端可以连接到任何合适的控制器,例如,图1所示的装置43。近侧线61的远端连接到第一端接/套圈球62或与其成一体。远侧线63的远端连接到轴24的远端以控制其铰接。远侧线63的近端连接到第二端接/套圈球64或与其成一体。球62和64可以是任何合适的材料,例如铅,并且不受特别限制。替代地,每个球62、64可以是对应线61、63的机加工或热处理端。此外,球62、64并不特别限于球,并且可以是任何合适的扩大部。类似地,线材61和63不受特别限制,并且可以是用于医疗手术的任何合适的线缆或线材(例如,医疗级塑料或金属)。
44.陀螺仪50包括可旋转地相互连接的近侧陀螺仪51和远侧陀螺仪55。近侧陀螺仪51是围绕引导件14并且保持近侧线61的结构。远侧陀螺仪55是围绕远侧工作通道22并且保持远侧线63的结构。远侧陀螺仪55可以固定在通道22周围,使得其可以与通道22一起相对于近侧陀螺仪51旋转。近侧陀螺仪51可以固定到引导件14。近侧陀螺仪51包括凹部52和向近侧突出的凸缘53,从而部分地覆盖凹部51。近侧陀螺仪51还包括凸缘73,其位于凹部52的近侧并且相对于近侧陀螺仪51的其余部分径向向外突出。凸缘73突出的距离不受特别限制,只要其可以容纳在装置1”内即可。凸缘73在其径向突出部的大约中点处包括通道74。通道74平行于或大约平行于引导件14的纵向轴线行进。通道74的宽度可以使得其适应近侧线61,但其比位于通道74远侧的第一球62的直径更窄。因此,通道74保持近侧线61且同时还锚
固第一球62,使得当向近侧拉动时,阻止近侧线61滑出通道74。远侧陀螺仪55包括空隙56和向远侧突出的凸缘57,从而部分地覆盖空隙56。远侧陀螺仪55还包括在许多方面类似于凸缘73的凸缘71。凸缘71在其径向突出部的大约中点处包括通道72。类似于凸缘73,凸缘71保持近侧线63且同时还锚固第二球64,使得当向近侧拉动远侧陀螺仪55时,阻止近侧线63滑出通道72。应当注意,空隙56、凸缘57、凹部52和凸缘53是环形的,因此其围绕近侧陀螺仪51和远侧陀螺仪55的圆周接合。
45.近侧陀螺仪51和远侧陀螺仪55可以由于其互锁而彼此持续接合。远侧陀螺仪55围绕近侧陀螺仪51的凸缘53互锁,使得远侧陀螺仪55和近侧陀螺仪51的部分彼此紧密邻接,同时还允许远侧陀螺仪55或近侧陀螺仪51相对于另一个的旋转。远侧陀螺仪55的凸缘57和近侧陀螺仪51的凸缘53相互钩住,这是因为凸缘57保持在近侧凸缘51的凹部52内,并且凸缘53保持在远侧陀螺仪55的空隙56内。因此,凸缘53和57的钩状特征阻止近侧陀螺仪51和远侧陀螺仪55彼此脱离。应当注意,凸缘53、57、凹部52和空隙56的尺寸不受特别限制,并且可以是允许在近侧陀螺仪51和远侧陀螺仪55之间的上述可旋转的互锁接合的任何合适的尺寸。
46.鉴于上述情况,当远侧部分20或近侧部分10相对于另一个旋转时,可旋转陀螺仪50使得近侧转向线61或远侧转向线63能够旋转。此外,陀螺仪50的上述配置使得柔性轴24能够经由转向线60进行铰接。近侧线61,包括第一球62,可以经由任何合适的控制器,例如,装置43(未示出)的致动来被拉动,由于第一球62抵靠凸缘73拉动,该装置继而拉动近侧陀螺仪51。由于其的互锁接合,拉动控制陀螺仪51导致远侧陀螺仪53被拉动。由于凸缘71推挤第二球64,这继而拉动远侧转向线63,并且导致转向线63拉动轴24的远端,从而使其能够铰接。
47.图3b示出了包括两个可旋转陀螺仪50a和50b的医疗装置1”,这两个陀螺仪都与图3a的可旋转陀螺仪50相同。陀螺仪50a和50b分别保持两根转向线60a和60b。应当注意,包括在医疗装置中的陀螺仪的数量不受特别限制,并且可以是与在医疗装置实施例中的转向线的数量(例如,一根、两根或四根)相对应的任何合适的数量。如图3b所示,一个陀螺仪,可旋转陀螺仪50a可以定位在引导件14的腔(未示出)和工作通道22相接的区域周围,如上文针对图3a所述。同时,第二陀螺仪,可旋转陀螺仪50b可以定位在陀螺仪50a的近侧,因此其也可以位于近侧部分10内。转向线60a和60b联接到轴24的远端。因此,当轴24旋转时,保持远侧线63a和63b的远侧陀螺仪55a和55b也可以旋转。
48.还可以在包括可旋转工作通道的医疗装置中实现抽吸。如图4所示的医疗装置1
”’
在许多方面类似于装置1。相同的附图标记指代相同的零件。下面将描述在装置1和装置1
”’
之间的差异。在装置1
”’
中,工作通道12’是从近侧部分10延伸通过可旋转远侧部分20”至轴(未示出)的远端的可旋转管。通道12’的至少一部分可以固定至轴。因此,通道12’作为一个整体可以在远侧部分20”和轴旋转时而旋转。工作通道12’包括围绕其圆周分布的多个圆形/椭圆形开口120。开口120的数量和开口120的形状不受特别限制。此外,开口120经由密封环13a和13b与工作通道12’的剩余未打开部分密封。环13a和13b装配在工作通道12’的与开口120相邻的部分周围,其中一个环13a在开口120的远侧,并且另一个环13b位于开口120的近侧。环13a和13b可以装配在工作通道12’的周围,使得其用作密封件,同时还能够实现通道12’在环13a和13b内的旋转。环13a和13b可以是用于密封目的的任何合适的材料,例
如,橡胶。
49.装置1
”’
还包括管状抽吸体200,其一端装配在工作通道12’的一部分周围。抽吸体200包括管壁201、腔202和空腔203。腔202的一端可以连接到抽吸源(未示出)和/或收集抽吸材料的处置装置(未示出)。腔202的另一端通向管状抽吸体200的空腔203,从而围绕工作通道12’的包括开口120的部分。包括空腔203的抽吸体200的部分包括近侧和远侧开口204、205。开口204、205套在通道12’上并且包括环13a、13b。在图4中,包括空腔203的抽吸体200的部分装配在工作通道12’的上述部分的周围,使得空腔203和开口120与装置1
”’
的其余部分密封。因此,这样的配置使得抽吸体200能够抽吸和去除已经被捕获在位于开口120远侧的工作通道12’的一部分内的材料,例如,流体。该材料可以经由抽吸通过开口120从通道12’离开并且落入腔201中。上述配置使得能够在仍然通过端口11和工作通道12’引入附件装置(例如,附件3)的同时进行抽吸。
50.对于本领域的技术人员来说将显而易见的是,在不脱离本发明的范围的情况下可以对所公开的装置进行各种修改和变化。根据对本文所公开的本发明的说明书和实践的考虑,本发明的其他实施例对于本领域的技术人员来说将是显而易见的。其旨在将说明书和实例考虑为仅仅是示例性的,且本发明的真实范围和精神由下列权利要求指出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1