用于驱动多根缆线的具有单输入装置的医疗器械的制作方法
用于驱动多根缆线的具有单输入装置的医疗器械
1.相关申请
2.本专利申请要求于2020年5月4日提交的名称为“用于驱动多根缆线的具有单输入装置的医疗器械(medical instrument having single input for driving multipe cables)”的美国临时专利申请第63/019,529号的优先权和申请日权益,该申请的全部内容通过引用并入本文。
技术领域
3.本文所述的各方面涉及医疗设备,并且更具体地涉及在微创手术期间使用的医疗器械。更具体地,本文描述的实施例涉及包括用于利用单次旋转输入驱动多根缆线的机构(例如,主动轮)的设备。
背景技术:
4.用于微创手术(mis)的已知技术采用可以手动控制或经由计算机辅助远程操作控制以便操纵或以其他方式参考患者体内的组织移动的器械。许多已知的mis器械包括安装在轴的远端处的可选腕部机构上的治疗或诊断末端执行器(例如,镊子、切割工具、烧灼工具、缝合器、针驱动器或活检工具)。在mis程序期间,末端执行器、腕部机构和轴的远端被插入患者的小切口或自然孔口中,以将末端执行器定位在患者体内的工作部位处。
5.在已知的mis器械中,患者体内的末端执行器运动通常以两种方式完成。首先,器械作为一个整体可以在一个或多个机械自由度(dof)(例如,沿着x、y和z笛卡尔轴)移动以在工作部位处平移末端执行器。其次,可选的腕部机构包括一个或多个机械自由度,以使末端执行器能够相对于器械的主体旋转(例如,围绕x、y和z笛卡尔轴,有时任意称为俯仰轴线、偏航轴线和插入轴线)。例如,已知的腕部机构通常能够改变末端执行器相对于器械轴的俯仰和偏航。腕部可以可选地为末端执行器提供滚动dof,或者滚动dof可以可选地通过滚动器械轴来实现。末端执行器可以可选地具有附加的机械dof,例如钳爪元件握持运动或刀片运动。在一些情况下,腕部机械dof和末端执行器机械dof可以结合使用。例如,美国专利第5,792,135号(1997年5月16日提交)公开了一种将腕部偏航dof和末端执行器握持dof组合在一起的机构。
6.为了实现腕部机构和末端执行器的期望移动,已知的器械通常包括受拉元件(例如,缆线),所述受拉元件从远侧的腕部机构和末端执行器通过器械的轴延伸到近侧的机械结构,该机械结构被配置为移动所述受拉元件以操作腕部机构和末端执行器。对于计算机辅助远程操作系统,机械结构通常是马达驱动的并且可操作地联接到处理系统,以为临床用户(例如,外科医生)提供用户接口从而控制器械。远程操作的医疗器械中的已知机械结构包括一个或多个主动轮,每个主动轮联接到缆线,使得当主动轮被马达旋转时,缆线移动以操作腕部机构或末端执行器。通常,每个主动轮附接到两根缆线(或单根缆线环的两端),以便当主动轮旋转时,主动轮的一侧放出缆线,而主动轮的另一侧拉入等长的缆线。在这种架构下,三个自由度使用从腕部机构沿着器械轴的长度延伸到器械的机械结构的总共六根
缆线。例如,腕部机构可以可操作地联接到三个主动轮,用于绕俯仰轴线、偏航轴线或握持轴线旋转。然而,腕部机构和机械结构的高效实施提出了一个复杂的设计问题,因为必须仔细布线缆线以维持腕部机构在其整个运动范围内的稳定性并最小化一个腕部旋转轴线与另一个的相互作用(或联接效应)。
7.对于一些已知的器械,希望腕部机构能够绕轴线(例如,任意指定的俯仰轴线)角位移超过90度。腕部机构自身向后弯曲超过90度的概念被称为“反曲”运动。为了完成这种反曲运动,一些已知的腕部机构包括多个连杆,这些连杆可枢转地串联联接在一起,以绕连杆之间的一个或多个轴线相对于彼此旋转。例如,具有两对或更多对连杆的腕部机构(其中每对都绕轴线(例如,两个或更多个平行的俯仰轴线)旋转)当每对连杆绕其相关联的轴线旋转超过45度时可以产生反曲运动。
8.但是,多对连杆增加了机械结构操作腕部机构的复杂性。具体来说,这种带有附加的移动元件的腕部机构在腕部机构、轴和机械结构中需要额外的缆线,该机械结构移动所述缆线。由于mis应用或现有计算机辅助远程操作手术系统的设计架构(例如,有限的可用驱动输入装置)所需的机械结构和整体器械尺寸限制,包括额外的缆线以对抗存在的有限空间。例如,机械结构可以仅允许有限数量的主动轮(或用于移动相关联主动轮的驱动输入装置)来移动缆线。因此,在特定的机械结构内以及在计算机辅助远程手术系统中使用的器械的特定设计约束内,可能无法添加额外的缆线以促进腕部机构的期望性能。
9.因此,存在对改进的微创手术器械的需求,该手术器械包括改进的机械结构,以能够包括用于操作腕部机构的额外缆线,降低器械成本,并通过减少所需零件的数量来降低制造成本。还存在对改进的微创手术器械的需求,该手术器械可以提供对腕部机构的移动(尤其是反曲运动)的改进控制。
技术实现要素:
10.本发明内容介绍了本文描述的实施例的某些方面以提供基本理解。本发明内容不是对本发明主题的广泛概述,并且其并非旨在识别关键或重要元素或划定本发明主题的范围。在一些实施例中,医疗器械包括具有远端部分和近端部分的器械轴、腕部、机械结构、第一缆线和第二缆线。腕部被联接到器械轴的远端部分。机械结构被联接到器械轴的近端部分并且包括主动轮组件。主动轮组件包括具有第一半径的第一缆线卷筒和具有不同于第一半径的第二半径的第二缆线卷筒。第一缆线包括近端部分和远端部分并且沿着器械轴布线。第一缆线的远端部分联接到腕部,并且第一缆线的近端部分缠绕在第一缆线卷筒上。第二缆线包括近端部分和远端部分并且沿着器械轴布线。第二缆线的远端部分联接到腕部,并且第二缆线的近端部分缠绕在第二缆线卷筒上。
11.在一些实施例中,主动轮组件包括输入盘并限定旋转轴线。输入盘被配置为由致动器驱动以使主动轮组件绕旋转轴线旋转。主动轮组件绕旋转轴线的旋转以与第一半径成比例的第一速度移动第一缆线,并且以与第二半径成比例的第二速度移动第二缆线。在一些实施例中,主动轮组件绕旋转轴线的旋转使第一缆线和第二缆线沿相同方向移动以致动腕部。在另一些实施例中,主动轮组件绕旋转轴线的旋转使第一缆线沿第一方向移动并且使第二缆线沿与第一方向相反的第二方向移动。
12.在一些实施例中,医疗器械包括第三缆线和第四缆线。第三缆线包括近端部分和
远端部分并且沿着器械轴布线。第三缆线的远端部分联接到腕部,并且第三缆线的近端部分缠绕在第一缆线卷筒上。第四缆线包括近端部分和远端部分并且沿着器械轴布线。第四缆线的远端部分联接到腕部,并且第四缆线的近端部分缠绕在第二缆线卷筒上。在一些实施例中,主动轮组件包括输入盘并限定旋转轴线。输入盘被配置为由致动器驱动以使主动轮组件绕旋转轴线旋转。主动轮组件绕旋转轴线的旋转沿第一方向移动第一缆线和第二缆线以致动腕部。主动轮组件绕旋转轴线的旋转使第三缆线和第四缆线沿相反的第二方向移动以致动腕部。在一些实施例中,主动轮组件包括主动轮轴,并且输入盘被联接以旋转主动轮轴。第一缆线卷筒包括第一缠绕构件和第二缠绕构件。第一缠绕构件通过第一夹具联接到主动轮轴,并且第一缆线的近端部分沿第一方向缠绕在第一缠绕构件上。第二缠绕构件通过第二夹具联接到主动轮轴,并且第三缆线的近端部分沿第二方向缠绕在第二缠绕构件上。
13.在一些实施例中,腕部包括第一连杆和第二连杆,并且限定了第一轴线和第二轴线。第一连杆可绕第一轴线相对于器械轴旋转,并且第一缆线的远端部分联接到第一连杆。第二连杆可绕第二轴线相对于器械轴旋转,并且第二缆线的远端部分穿过第一连杆布线并联接到第二连杆。在一些实施例中,第一连杆通过一个或多个中间连杆联接到第二连杆,并且第一轴线平行于第二轴线。
14.在一些实施例中,医疗器械包括具有远端部分和近端部分的器械轴、腕部、机械结构、第一缆线和第二缆线。腕部被联接到器械轴的远端部分。机械结构被联接到器械轴的近端部分并且包括主动轮组件。主动轮组件包括第一驱动构件和第二驱动构件。第一缆线包括近端部分和远端部分并且沿着器械轴布线。第一缆线的远端部分联接到腕部并且第一缆线的近端部分可操作地联接到第一驱动构件,使得主动轮轴的旋转以第一速度移动第一缆线的近端部分。第二缆线包括近端部分和远端部分并且沿着器械轴布线。第二缆线的远端部分联接到腕部并且第二缆线的近端部分可操作地联接到第二驱动构件,使得主动轮轴的旋转以不同于第一速度的第二速度移动第二缆线的近端部分。在一些实施例中,主动轮轴、第一驱动构件和第二驱动构件是同心的。在另一些实施例中,第一驱动构件和第二驱动构件中的一者或两者可以与主动轮轴不同心。
15.在一些实施例中,第一驱动构件是联接到主动轮轴的第一缆线卷筒,并且第一缆线的近端部分缠绕在第一缆线卷筒上。在一些实施例中,第二驱动构件是联接到主动轮轴的第二缆线卷筒,并且第二缆线的近端部分缠绕在第二缆线卷筒上。在一些实施例中,第二驱动构件是联接到主动轮轴的驱动齿轮。该机械结构还包括具有与驱动齿轮接合的从动齿轮部分的传送构件。第二缆线的近端部分联接到传送构件。在一些实施例中,主动轮轴限定第一旋转轴线,并且第一缆线卷筒和驱动齿轮构件与第一旋转轴线同心。传送构件限定与第一旋转轴线不同心的第二旋转轴线。在一些实施例中,传送构件的从动齿轮部分是扇形齿轮。
16.在一些实施例中,医疗器械包括第三缆线和第四缆线。第三缆线包括近端部分和远端部分并且沿着器械轴布线。第三缆线的远端部分联接到腕部,并且第三缆线的近端部分可操作地联接到第一驱动构件。第四缆线包括近端部分和远端部分并且沿着器械轴布线。第四缆线的远端部分联接到腕部,并且第四缆线的近端部分可操作地联接到第二驱动构件。在一些实施例中,主动轮组件绕旋转轴线的旋转沿第一方向移动第一缆线和第二缆
线以致动腕部。主动轮组件绕旋转轴线的旋转使第三缆线和第四缆线沿相反的第二方向移动以致动腕部。
17.在一些实施例中,医疗器械包括具有远端部分和近端部分的器械轴、腕部、第一缆线和第二缆线。腕部联接到器械轴的远端部分。第一缆线包括近端部分和远端部分并且沿着器械轴布线。第一缆线的远端部分联接到腕部。第二缆线包括近端部分和远端部分并且沿着器械轴布线。第二缆线的远端部分联接到腕部。该医疗器械还包括用于移动第一缆线的近端部分和第二缆线的近端部分以基于单个输入装置致动腕部使得第一缆线的近端部分以第一速度移动并且第二缆线的近端部分以不同于第一速度的第二速度移动的装置。
18.在一些实施例中,所述用于移动的装置包括主动轮轴、第一缆线卷筒和第二缆线卷筒。第一缆线卷筒和第二缆线卷筒各自联接到主动轮轴。第一缆线的近端部分缠绕在第一缆线卷筒上,并且第二缆线的近端部分缠绕在第二缆线卷筒上。在一些实施例中,第一缆线卷筒限定第一半径并且第二缆线卷筒限定与第一半径不同的第二半径。
19.在一些实施例中,所述用于移动的装置包括主动轮轴、缆线卷筒、驱动齿轮和传送构件。缆线卷筒联接到主动轮轴,并且第一缆线的近端部分缠绕在第一缆线卷筒上。驱动齿轮联接到主动轮轴并与传送构件接合。第二缆线的近端部分联接到传送构件。
20.在一些实施例中,医疗器械包括远侧第一可移动部件、远侧第二可移动部件、第一受拉构件、第二受拉构件、近侧可旋转主动轮、联接到该主动轮的第一驱动构件和联接到该主动轮的第二驱动构件。第一驱动构件包括第一缠绕区域,并且第二驱动构件包括第二缠绕区域。第一受拉构件从第一可移动部件延伸以在第一缠绕区域处至少部分地缠绕在第一驱动构件上。第二受拉构件从第二可移动部件延伸以在第二缠绕区域处至少部分地缠绕在第二驱动构件上。第一驱动构件在第一受拉构件在第一缠绕区域处缠绕和解开的位点处具有第一旋转半径。第二驱动构件在第二受拉构件在第二缠绕区域处缠绕和解开的位点处具有第二旋转半径。第二旋转半径不同于第一旋转半径。
21.在一些实施例中,医疗器械包括第三受拉构件、第四受拉构件、联接到主动轮的第三驱动构件和联接到主动轮的第四驱动构件驱动构件。第三驱动构件包括第三缠绕区域,并且第四驱动构件包括第四缠绕区域。第三受拉构件从第一可移动部件延伸以在第三缠绕区域处至少部分地缠绕在第三驱动构件上。第四受拉构件从第二可移动部件延伸以在第四缠绕区域处至少部分地缠绕在第四驱动构件上。第三驱动构件在第三受拉构件在第三缠绕区域处缠绕和解开的位点处具有第一旋转半径,并且第四驱动构件在第四受拉构件在第四缠绕区域处缠绕和解开的位点处具有第二旋转半径。
22.在一些实施例中,受拉构件是缆线。在一些实施例中,医疗器械包括远侧腕部和联接到该腕部的远侧末端执行器。第一可移动部件和第二可移动部件形成该腕部的至少一部分(例如,第一可移动部件和第二可移动部件是该腕部的连杆)。医疗器械限定第一纵向取向,并且末端执行器限定第二纵向取向。主动轮的旋转将末端执行器从第二纵向取向与第一纵向取向对齐的第一状态移动到第二纵向取向相对于第一纵向取向后弯的第二状态。
23.在一些实施例中,医疗器械包括用于在单主动轮旋转时将第一受拉构件移动第一距离并将第二受拉构件移动第二距离的近侧装置。该医疗器械包括联接到第一受拉构件的远侧第一可移动装置。该医疗器械包括联接到第二受拉构件的远侧第二可移动装置。
24.在一些实施例中,一种操作医疗器械的方法包括通过旋转近侧单主动轮来移动远
侧第一可移动部件和远侧第二可移动部件,以将联接到第一可移动部件的第一受拉构件移动第一距离并且将联接到第二可移动部件的第二受拉构件移动不同于第一距离的第二距离。
25.在一些实施例中,一种医疗器械包括具有远端部分和近端部分的器械轴、腕部、机械结构、第一受拉构件、第二受拉构件、第三受拉构件和第四受拉构件。腕部联接到器械轴的远端部分。机械结构联接到器械轴的近端部分并且包括主动轮组件。主动轮组件包括第一驱动构件、第二驱动构件、第三驱动构件和第四驱动构件。第一受拉构件包括近端部分和远端部分并且沿着器械轴布线。第一受拉构件的远端部分联接到腕部,并且第一受拉构件的近端部分可操作地联接到第一驱动构件。第二受拉构件包括近端部分和远端部分并且沿着器械轴布线。第二受拉构件的远端部分联接到腕部并且第二受拉构件的近端部分可操作地联接到第二驱动构件。第三受拉构件包括近端部分和远端部分并且沿着器械轴布线。第三受拉构件的远端部分联接到腕部并且第三受拉构件的近端部分可操作地联接到第三驱动构件。第四受拉构件包括近端部分和远端部分并且沿着器械轴布线。第四受拉构件的远端部分联接到腕部并且第四受拉构件的近端部分可操作地联接到第四驱动构件。
26.对于本领域技术人员而言,在阅读以下附图和详细描述后,根据实施例的其他医疗设备、相关部件、医疗设备系统和/或方法将是显而易见的或将变得显而易见。本说明书中包括的所有此类附加的医疗设备、相关部件、医疗设备系统和/或方法旨在落入本公开的范围内。
附图说明
27.图1是根据实施例的用于执行诸如手术的医疗程序的微创远程操作医疗系统的平面图。
28.图2是图1所示微创远程操作手术系统的可选辅助单元的透视图。
29.图3是图1所示微创远程操作手术系统的用户控制台的透视图。
30.图4是图1所示微创远程操作手术系统的包括多个器械的操纵器单元的前视图。
31.图5-6是根据实施例的医疗器械的示意图,示出了后视图(图5)和前视图(图6)。
32.图7是图5和图6所示医疗器械的主动轮组件的侧视图。
33.图8是根据实施例的医疗器械的前视图示意图。
34.图9是根据实施例的医疗器械的主动轮组件的侧视图。
35.图10是根据实施例的包括缆线卷筒和驱动齿轮的医疗器械的主动轮组件的侧视图。
36.图11是根据实施例的包括缆线卷筒和驱动齿轮的医疗器械的主动轮组件的前视图。
37.图12是根据实施例的医疗器械的透视图。
38.图13和图14是从远侧视角(图13)和近侧视角(图14)见到的图12的区域z1中所示机械结构的放大透视图。
39.图15是图13和图14所示机械结构的近侧透视图,其中第一安装支架被移除以更清楚地示出内部部件。
40.图16是图13和图14所示机械结构的近侧透视图,其中第二安装支架被移除以更清
楚地示出内部部件。
41.图17是图13和图14所示机械结构的近侧透视图,其中附加部件被移除以更清楚地示出根据实施例的主动轮组件。
42.图18和图19是图17所示主动轮组件的透视图。
43.图20是图13和图14所示机械结构的剖视图,以示出图17所示主动轮组件。
44.图21是图17所示主动轮组件的分解图。
45.图22是图17所示主动轮组件的输入盘和第一缆线卷筒的透视图。
46.图23是图17所示主动轮组件的第四缆线卷筒的透视图。
47.图24是图17所示主动轮组件的第二缆线卷筒的透视图。
48.图25是图12的区域z2中所示腕部组件和末端执行器的放大透视图。
49.图26和图27是图25所示腕部组件处于第一配置(图26)和第二配置(图27)的侧视图。
50.图28是图25-27所示腕部组件的远侧透视图,其中某些连杆被移除以清楚地示出缆线布线。
51.图29-30是图25-27所示腕部组件的第一连杆的透视图。
52.图31-32是图25-27所示腕部组件的第二连杆的透视图。
53.图33-34是图25-27所示腕部组件的第五连杆的透视图。
具体实施方式
54.本文所述的实施例可以有利地用于与微创手术相关联的各种抓握、切割和操纵操作中。
55.本技术的医疗器械能够以三个或更多自由度(例如,绕俯仰轴线、偏航轴线和握持轴线)运动,并且可以容纳任何合适数量的缆线以适应期望的运动。具体而言,本文所述的医疗器械包括腕部机构,该腕部机构可以产生反曲运动并且由八根或更多根缆线致动。本文所述的移动缆线以操作腕部机构的机械结构包括可以经由单个输入装置以不同量或不同速度移动多根缆线的机构。例如,本文所述的实施例可包括一个或多个主动轮组件,该主动轮组件包括以第一速度驱动第一缆线对的第一驱动构件和以第二速度驱动第二缆线对的第二驱动构件。通过使单主动轮组件(由单次旋转输入旋转)移动两个缆线对(即四根缆线),减少了机械结构内所需的空间(如实现运动所需的驱动输入装置或主动轮的所需数量一样)并且可以保持将器械联接到当前mirs系统的架构。本文所述的实施例还限制了所需零件的数量,从而降低了总成本并使医疗器械能够进一步小型化以促进mis程序。此外,本文所述的医疗器械提供了对用于操作腕部机构的缆线移动的改进控制。
56.如本文所使用的,术语“约”在与引用的数字指示结合使用时是指引用的数字指示加上或减去高达该引用的数字指示的10%。例如,语言“约50”涵盖了45到55的范围。类似地,语言“约5”涵盖了4.5到5.5的范围。
57.与零件(例如机械结构、部件或部件组件)相关联的术语“柔性”应作广义解释。从本质上讲,该术语是指零件可以反复弯曲并恢复到原始形状而不会损坏该零件。某些柔性部件也可以是有弹性的。例如,如果部件(例如,挠曲件)具有在其弹性变形时吸收能量并然后在卸载(即恢复到其原始状态)时释放储存的能量的能力,则称其为有弹性的。由于材料
特性,许多“刚性”物体具有轻微的固有弹性“弯曲度”,但是这些物体不被视为“柔性的”(如该术语在本文所使用时)。
58.如在本说明书和随附权利要求中使用的,词语“远侧”是指朝向工作部位的方向,而词语“近侧”是指远离工作部位的方向。因此,例如,工具的最接近目标组织的端部将是该工具的远端,而与远端相反的端部(即,由用户操纵或联接到致动轴的端部)将是该工具的近端。
59.此外,选择用于描述一个或多个实施例和可选元件或特征的特定词语不旨在限制本发明。举例来说,空间相对术语——例如,“在
……
下方”、“在
……
下面”、“下部”、“在
……
上方”、“上部”、“近侧”、“远侧”及类似表述——可用于描述如图中所说明的一个元件或特征与另一元件或特征的关系。除了图中所展示的位置及取向之外,这些空间相对术语旨在涵盖在使用或操作中的设备的不同位置(即,空间中的位置)及取向(即,空间中的旋转放置)。举例来说,如果图中的设备倒过来,那么描述为“在”其它元件或特征“下方”或“在”其它元件或特征“下面”的元件将变成“在”其他元件或特征“上方”或“在”其它元件或特征“上面”。因此,术语“在
……
下方”可涵盖上方及下方的位置及取向两者。设备可以其它方式定向(例如,旋转90度或处于其它取向),且本文中所用的空间相对描述符可相应地进行解释。同样地,对沿着不同轴线(平移)及围绕不同轴线(旋转)的移动的描述包含各种空间设备位置及取向。身体的位置和取向的组合定义了身体的姿势。
60.类似地,除非上下文以其它方式指示,否则几何术语(例如,“平行”、“垂直”、“圆形”或“正方形”)并不旨在要求绝对数学精度。相反,这类几何术语允许因制造所致的变化或等效物功能。举例来说,如果将元件描述为“圆形”或“大体上圆形”,那么此描述仍涵盖并非精确地环形(例如,为稍呈长椭圆形或为多边的多边形的一者)的部件。
61.另外,除非上下文以其它方式指示,否则单数形式“一”、“一个”及“该/所述”还意在包含复数形式。术语“包括”、“包含”、“具有”及类似表述指定所陈述的特征、步骤、操作、元件、部件等的存在但并未排除一个或更多个其它特征、步骤、操作、元件、部件或组的存在或添加。
62.除非另有说明,否则术语装置、医疗设备、器械及其变体可以互换使用。
63.主要依据使用由加利福尼亚州的森尼韦尔市的直观外科公司商品化的da手术系统的实施方式描述本发明的各方面。这种手术系统的示例是da vinci手术系统(is4000型)、da vinci 手术系统(is4200型)及da vinci手术系统(is3000型)。然而,博学的人将理解,本文中所公开的发明性方面可以不同方式体现及实施,包括计算机辅助、非计算机辅助以及手动和计算机辅助实施例和实施方式的混合组合。关于da 手术系统(例如,is4000型、is3000型、is2000型、is1200型)的实施方式仅作为示例呈现,并且它们不应被视为限制本文中所公开的发明性方面的范围。当适用时,发明性方面可以既在相对较小的手持式手动操作设备中又在具有附加机械支撑的相对较大的系统中体现及实施。
64.图1是计算机辅助远程操作系统的平面图。所示的是一种医疗设备,它是微创机器人手术(mirs)系统1000(在本文中也称为微创远程操作手术系统),用于对躺在手术台1010上的患者p执行微创诊断或手术程序。该系统可以具有任何数量的部件,例如供外科医生或其他熟练临床医生s在该程序期间使用的用户控制单元1100。mirs系统1000进一步可以包
括操纵器单元1200(通常称为手术机器人)以及可选的辅助装备单元1150。操纵器单元1200可以包括臂组件1300以及可移除地联接到臂组件的工具组件。在外科医生s查看手术部位并通过控制单元1100来控制至少一个可移除地联接的器械1400(在本文中也称为“工具”)的移动时,操纵器单元1200可以操纵该器械1400穿过患者p的身体中的微创切口或自然孔口。手术部位的图像由诸如立体内窥镜的内窥镜(未示出)获得,可以由操纵器单元1200操纵内窥镜来定向内窥镜。辅助装备单元1150可用于处理手术部位的图像,以便随后通过用户控制单元1100显示给外科医生s。一次使用的器械1400的数量通常将取决于诊断或手术程序以及手术室内空间约束等因素。如果需要在程序期间更换正在使用的器械1400中的一个或多个,则助手将器械1400从操纵器单元1200移除并用手术室中的托盘1020中的另一器械1400替换它。尽管被示为与器械1400一起使用,但本文所述的任何器械都可以与mirs 1000一起使用。
65.图2是控制单元1100的透视图。用户控制单元1100包括左眼显示器1112和右眼显示器1114,用于向外科医生s呈现能够实现深度感知的手术部位的协调立体视图。用户控制单元1100进一步包括一个或多个输入控制设备1116,所述一个或多个输入控制设备1116进而使操纵器单元1200(图1所示)操纵一个或多个工具。输入控制设备1116提供至少与与它们相关联的器械1400相同的自由度,以向外科医生s提供远程呈现或输入控制设备1116与器械1400集成(或直接连接到器械1400)的感觉。以这种方式,用户控制单元1100为外科医生s提供直接控制器械1400的强烈感觉。为此,可以采用位置、力和触觉反馈传感器(未示出)来将位置、力和触觉感觉通过输入控制设备1116从器械1400传回外科医生的手。
66.用户控制单元1100在图1中被示为与患者在同一个房间,这样外科医生s可以直接监控程序,必要时亲自到场,并直接与助手交谈,而不是通过电话或其他通信媒介。然而,在另一些实施例中,用户控制单元1100和外科医生s可以在不同的房间、在完全不同的建筑物中或在允许远程手术程序的患者的其他远程位点。
67.图3是辅助装备单元1150的透视图。辅助装备单元1150可以与内窥镜(未示出)联接并且可以包括一个或多个处理器以处理捕获的图像以用于后续显示,例如经由用户控制单元1100,或显示在位于本地和/或远程的另一个合适的显示器上。例如,在使用立体内窥镜的情况下,辅助装备单元1150可以处理捕获的图像以经由左眼显示器1112和右眼显示器1114向外科医生s呈现手术部位的协调立体图像。这种协调可以包括相对图像之间的对齐,并且可以包括调整立体内窥镜的立体工作距离。作为另一示例,图像处理可以包括使用先前确定的相机校准参数来补偿图像捕获设备的成像误差,例如光学像差。
68.图4示出了操纵器单元1200的前透视图。操纵器单元1200包括部件(例如,臂、联动机构、马达、传感器及类似部件)以提供对器械1400和成像设备(未示出)的操纵,所述成像设备诸如立体内窥镜,用于捕获程序部位的图像。具体地,器械1400和成像设备可以通过具有许多接头的远程操作机构来操纵。此外,器械1400和成像设备以如下方式穿过患者p中的切口或自然孔口进行定位和操纵:使得软件和/或运动学远程运动中心保持在该切口或孔口处。以这种方式,可以使切口尺寸最小化。
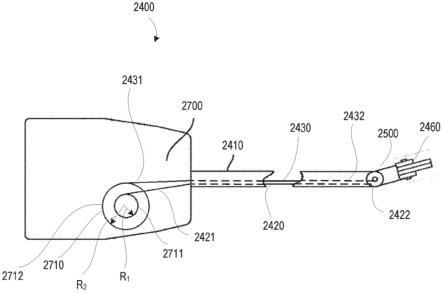
69.图5-7是根据实施例的医疗器械2400的示意图。器械2400包括轴2410、腕部2500、末端执行器2460、机械结构2700和一组缆线2401。轴2410包括近端部分2411和远端部分2412,并且可以是将腕部2500联接到机械结构2700的任何合适的细长结构。在一些实施例
中,轴2410(以及本文所述的任何轴)可以限定管腔,缆线2401及操作腕部2500和末端执行器2460的其他部件(例如,电线)穿过该管腔被布线。末端执行器2460经由腕部2500联接到轴2410的远端部分2412。末端执行器2460(以及本文所述的任何末端执行器)可以是在mis程序期间用于抓握、切割和操纵组织或其他物体的任何合适的机构。例如,在一些实施例中,末端执行器2460(以及本文所述的任何末端执行器)可以包括镊子、切割工具、烧灼工具、吻合器或缝合驱动器。末端执行器2460可以包括由缆线2401中的一根或多根致动的一个或多个部件(例如,工具构件)。
70.腕部2500包括一个或多个连杆(图5-7中未示出),所述一个或多个连杆用作将末端执行器2460联接到轴2410的远端部分2412的可移动部件。腕部2500的连杆相对于彼此(和轴2410)绕一个或多个旋转轴线旋转以产生期望的自由度。例如,在一些实施例中,腕部2500的连杆可以绕用作俯仰轴线(术语俯仰是任意的)的第一旋转轴线旋转,如箭头aa所示。在一些实施例中,腕部2500的连杆可以绕用作偏航轴线(术语偏航是任意的)的第二旋转轴线(例如,其正交于第一旋转轴线)旋转。在一些实施例中,腕部2500可以包括一组连杆,这些连杆通过限定旋转轴线的销接接头联接在一起。在另一些实施例中,连杆经由本文所示和描述的类型的配合盘表面联接在一起(参见例如下文描述的腕部7500)。在又一些实施例中,连杆经由配合球面表面联接在一起,使得一对配合连杆可以绕多个不同的旋转轴线旋转。在一些实施例中,腕部2500(以及本文所述的任何腕部)可以包括以能够产生绕一个或多个旋转轴线的反曲运动的方式联接在一起的一个或多个连杆。
71.机械结构2700用作传动装置或传动组件以移动腕部2500和末端执行器2460从而执行期望的操作。机械结构2700还与手术系统的其他部分(例如,上述的操纵器单元1200或臂组件1300)相接。在一些实施例中,机械结构2700(以及本文所述的任何机械结构)可以包括一个或多个驱动马达以产生用以移动医疗器械2400的部件的力或扭矩。在另一些实施例中,机械结构2700(以及本文所述的任何机械结构)中没有任何马达。例如,如图7所示,机械结构2700(以及本文所述的任何机械结构)可以联接到致动器2330(例如,操纵器单元的致动器,未示出)或由其驱动,该致动器2330向机械结构2700提供旋转输入。
72.如图5所示,机械结构2700联接到轴2410的近端部分2411并且包括移动缆线2401的一组主动轮组件。具体地,尽管机械结构2700被示为包括四个主动轮组件(即,第一主动轮组件2710、第二主动轮组件2720、第三主动轮组件2730和第四主动轮组件2740),但是在另一些实施例中,机械结构2700(以及本文所述的任何机械结构)可以包括任何合适数量的主动轮组件。此外,机械结构2700(以及本文所述的任何机械结构)可以包括任何其他合适的部件(例如,滑轮、齿轮传动的机构或传送机构)以在机械结构2700和轴2410内产生缆线2401的期望移动和布线。
73.第一主动轮组件2710(也称为主动轮组件)包括输入盘2760、第一缆线卷筒2711和第二缆线卷筒2712。主动轮组件2710还限定主动轮轴线ac,主动轮组件2710绕主动轮轴线ac旋转。如图7所示,当机械结构2700联接在手术系统内时,输入盘2760接合致动器2330。在使用中,致动器2330可以驱动输入盘2760(即,产生到输入盘2760中的旋转输入)以使主动轮组件2710绕主动轮轴线ac旋转,如图7中箭头bb所示。第一缆线卷筒2711(其用作第一驱动构件)联接到该组缆线2401中的第一缆线2420并且具有第一半径r1。第一半径r1垂直于主动轮轴线ac,并因此是第一缆线卷筒2711的旋转半径。第二缆线卷筒2712(其用作第二驱动构
件)联接到该组缆线2401中的第二缆线2430并且具有不同于第一半径r1的第二半径r2。第二半径r2垂直于主动轮轴线ac,并因此是第二缆线卷筒2712的旋转半径。尽管第二半径r2被示为大于第一半径r1,但在另一些实施例中,第二半径r2可以小于第一半径r1。
74.该组缆线2401可以包括在腕部2500和末端执行器2460内布线或联接到腕部2500和末端执行器2460的任何合适数量的缆线,以在缆线移动时产生期望的运动。具体地,该组缆线2401至少包括第一缆线2420和第二缆线2430。第一缆线2420(其用作受拉构件)包括近端部分2421和远端部分2422。第一缆线2420沿着轴2410布线,其中远端部分2422联接到腕部2500并且近端部分2421缠绕在第一缆线卷筒2711上。第二缆线2430(其用作受拉构件)包括近端部分2431和远端部分2432。第二缆线2430沿着轴2410布线,其中远端部分2432联接到腕部2500并且近端部分2431缠绕在第二缆线卷筒2712上。尽管第一缆线2420和第二缆线2430被示为在轴2410的内部管腔内延伸,但在另一些实施例中,缆线2401中的任何一根都可以在轴2410的外部布线。此外,第一缆线2420和第二缆线2430可以通过任何合适的机制(例如,通过将缆线卷曲固定在配合槽(或夹点)内,通过以防止滑动的方式将缆线缠绕在缆线卷筒(或腕部)上,或通过粘合剂)联接到腕部2500和它们各自的缆线卷筒。
75.在第一缆线2420和第二缆线2430各自联接到主动轮组件2710和腕部2500的情况下,第一主动轮2710的旋转移动可以导致第一缆线2420和第二缆线2430移动,从而操作腕部2500。具体地,当致动器2330接合输入盘2760时,来自致动器2330的旋转输入使主动轮组件2710(包括第一缆线卷筒2711和第二缆线卷筒2712)绕主动轮轴线ac旋转,如图7中箭头bb所示。第一缆线卷筒2711的旋转导致第一缆线2420的近端部分2421沿方向cc移动,如图7所示。类似地,第二缆线卷筒2712的旋转导致第二缆线2430的近端部分2431沿方向dd移动,如图7所示。因为第一半径r1的尺寸与第二半径r2不同,所以主动轮组件2710旋转通过特定角位移导致第一缆线2420的近端部分2421移动第一距离并且第二缆线2430的近端部分2431移动不同的第二距离。类似地,主动轮组件2710以特定角速度旋转导致第一缆线2420的近端部分2421以第一线速度移动并且第二缆线2430的近端部分2431以不同的第二线速度移动。第一距离与第二距离(以及第一线速度与第二线速度)之差与第一半径r1与第二半径r2之差有关。例如,如果第二半径r2与第一半径r1之间的比率为2:1,则第二缆线2430移动的距离与第二缆线2430移动的线速度将是第一缆线2420的两倍。
76.这种布置可以有利地允许单主动轮产生不同量的缆线移动或缆线速度。缆线移动的不同特性可以改善腕部2500和/或末端执行器2460的操作。例如,在一些实施例中,腕部2500可以包括限定多个弯曲轴线的一组连杆。当操作这种腕部时,第一根缆线(例如,致动最近侧的连杆的一根缆线)将具有比第二根缆线(例如,致动最远侧的连杆的一根缆线)更短的缆线路径。在这种情况下,第一根缆线的移动(或速度)应该小于第二根缆线的移动(或速度)。主动轮组件2710(以及本文所述的其他主动轮组件)可以利用单个输入产生期望的不同的移动(或缆线速度)量,从而保留机械结构2700中的空间并允许机械结构2700由现有的接口驱动。
77.如图7所示,第一缆线2420的近端部分2421绕第一缆线卷筒2711的第一侧(或沿第一缠绕方向)缠绕,并且第二缆线2430的近端部分2431绕第二缆线卷筒2712的第一侧(或沿第一缠绕方向)缠绕。以这种方式,主动轮组件2710绕主动轮轴线ac的旋转使第一缆线2420和第二缆线2430沿相同的方向(例如,同时拉入或同时放出每根缆线的末端)移动。然而,在
另一些实施例中,第一缆线2420的近端部分2421能够绕第一缆线卷筒2711的第一侧(或沿第一缠绕方向)缠绕,并且第二缆线2430的近端部分2431能够绕第二缆线卷筒2712的相反的第二侧(或沿相反的第二缠绕方向)缠绕。以这种方式,主动轮组件2710绕主动轮轴线ac的旋转使第一缆线2420沿第一方向移动并使第二缆线2430沿相反的第二方向移动。这导致在第二缆线2430正在放出的同时拉入第一缆线2420,反之亦然。
78.尽管医疗器械2400被显示和描述为包括缠绕在第一缆线卷筒2711上的第一缆线2420以及缠绕在第二缆线卷筒2712上的第二缆线2430,但在另一些实施例中,医疗器械2400可以包括缠绕在第一缆线卷筒2711和第二缆线卷筒2712上(并且由第一缆线卷筒2711和第二缆线卷筒2712移动)的附加缆线。例如,在一些实施例中,医疗器械2400(或本文所述的任何医疗器械)可以包括缠绕在第一缆线卷筒上的第三缆线(未示出)以及缠绕在第二缆线卷筒上的第四缆线(未示出)。在这种布置中,旋转可以使第一缆线以第一距离(或以第一速度)放出并且使第三缆线以第一距离(或以第一速度)拉入。旋转还可以使第二缆线以第二距离(或以第二速度)放出并且使第四缆线以第二距离(或以第二速度)拉入。以这种方式,主动轮组件2700可以用一次旋转输入移动四根缆线。
79.尽管第一缆线卷筒2711和第二缆线卷筒2712均被示为圆柱形并且分别具有第一半径r1和第二半径r2,但在另一些实施例中,本文所述的任何缆线卷筒或驱动构件可以具有非圆形横截面形状。例如,在一些实施例中,本文所述的任何缆线卷筒或驱动构件可具有椭圆形形状,类似于凸轮轴凸角,以改变从缆线卷筒拉入或放出的缆线的移动距离或速度。以这种方式,即使当主动轮组件以恒定角速度旋转时,缆线的线速度也可以根据主动轮组件的角位置而变化。例如,图8是根据实施例的医疗器械3400的前视图示意图。与上述器械2400一样,器械3400包括轴3410、腕部3500、末端执行器3460、机械结构3700以及至少第一缆线3420和第二缆线3430。轴3410包括近端部分3411和远端部分3412,并且可以是将腕部3500联接到机械结构3700的任何合适的细长结构。末端执行器3460经由腕部3500联接到轴3410的远端部分3412。末端执行器3460(以及本文所述的任何末端执行器)可以是在mis程序期间用于抓握、切割和操纵组织或其他物体的任何合适的机构。例如,在一些实施例中,末端执行器3460(以及本文所述的任何末端执行器)可以包括镊子、切割工具、烧灼工具、吻合器或缝合驱动器。末端执行器3460可以包括由一根或多根缆线致动的一个或多个部件(例如,工具构件)。腕部3500在结构和功能上可以与腕部2400相似,并因此在此不再详细描述。具体地,如上所述,腕部3500的连杆可以绕用作俯仰轴线(术语俯仰是任意的)的第一旋转轴线旋转,如箭头ee所示。在一些实施例中,腕部3500的连杆可以绕用作偏航轴线(术语偏航是任意的)的第二旋转轴线(例如,其正交于第一旋转轴线)旋转。
80.机械结构3700用作传动装置或传动组件以移动腕部3500和末端执行器3460从而执行期望的操作。机械结构3700还与手术系统的其他部分(举例来说,例如上述的操纵器单元1200或臂组件1300)相接。例如,与机械结构2700一样,机械结构3700可以联接到致动器(例如,操纵器单元的致动器,未示出)或由其驱动,该致动器向机械结构3700提供旋转输入。机械结构3700联接到轴3410的近端部分3411,并且包括移动器械3410内的缆线的一个或多个主动轮组件。具体地,机械结构3700包括第一主动轮组件3710,第一主动轮组件3710具有输入盘(未显示)、第一缆线卷筒3711和第二缆线卷筒3712。主动轮组件3710还限定主动轮轴线,主动轮组件3710绕该主动轮轴线旋转。在使用中,致动器(未示出)可以产生旋转
输入以使主动轮组件3710绕主动轮轴线旋转。第一缆线卷筒3711(用作第一驱动构件)联接到第一缆线3420,并且第二缆线卷筒3712(用作第二驱动构件)联接到第一缆线3430。
81.如图所示,第一缆线卷筒3711具有以第一尺寸s1为特征的非圆形横截面形状。第一缆线卷筒3711的横截面形状可以是具有期望轮廓(例如,像凸轮轮廓)的椭圆形形状。第一尺寸s1可以是椭圆形形状的基圆的半径。在另一些实施例中,第一尺寸s1可以是第一缆线卷筒3711的椭圆形形状的一部分的曲率半径。与第二缆线卷筒2711一样,第二缆线卷筒3712具有以第二尺寸s2为特征的圆形横截面形状,第二尺寸s2可以是第二缆线卷筒3712的半径。如图所示,第二尺寸s2大于第一尺寸s1。在另一些实施例中,第二尺寸s2可以小于第一尺寸s1。
82.如图所示,第一缆线3420(其用作受拉构件)包括近端部分3421和远端部分3422。第一缆线3420沿着轴3410布线,其中远端部分3422联接到腕部3500并且近端部分3421联接到第一缆线卷筒3711。第二缆线3430(其用作受拉构件)包括近端部分3431和远端部分3432。第二缆线3430沿着轴3410布线,其中远端部分3432联接到腕部3500并且近端部分3431联接到第二缆线卷筒3712。第一缆线3420和第二缆线3430可以通过任何合适的机制(例如,通过将缆线卷曲固定在配合槽(或夹点)内,通过以防止滑动的方式将缆线缠绕在缆线卷筒(或腕部)上,或通过粘合剂)联接到腕部3500和它们各自的缆线卷筒。
83.在第一缆线3420和第二缆线3430各自联接到主动轮组件3710和腕部3500的情况下,第一主动轮3710的旋转移动可以导致第一缆线3420和第二缆线3430移动,从而操作腕部3500。第一缆线卷筒3711的旋转导致第一缆线3420的近端部分3421线性移动。类似地,第二缆线卷筒3712的旋转导致第二缆线3430的近端部分3431线性移动。因为第一尺寸s1不同于第二尺寸s2,所以主动轮组件3710旋转通过特定角位移导致第一缆线3420的近端部分3421移动第一距离并导致第二缆线3430的近端部分3431移动不同的第二距离。类似地,主动轮组件3710以特定角速度旋转导致第一缆线3420的近端部分3421以第一线速度移动并且第二缆线3430的近端部分3431以不同的第二线速度移动。此外,因为第一缆线卷筒3711具有非圆形形状,所以从第一缆线卷筒3711释放或拉入第一缆线卷筒3711的第一缆线3420的线速率根据主动轮组件3710的角位置而变化。因此,第一缆线卷筒3710的非圆形形状可以提供对腕部3500的移动的附加水平的控制。
84.尽管主动轮组件3710被显示和描述为包括非圆柱形的第一缆线卷筒3711和圆柱形的第二缆线卷筒3712,但在另一些实施例中,主动轮组件可以包括两个(或更多)非圆柱形缆线卷筒。在又一些实施例中,第二缆线卷筒3712可以是非圆柱形的并且第一缆线卷筒3711可以是圆柱形的。
85.尽管第一缆线卷筒2711和第二缆线卷筒2712被示为与主动轮轴线ac同心,但在另一些实施例中,主动轮组件可包括与主动轮轴线ac不同心的一个或多个缆线卷筒或驱动构件。换句话说,在一些实施例中,主动轮组件可以包括具有与主动轮组件的旋转轴线不同心的中心线的一个或多个缆线卷筒或驱动构件。例如,图9是根据实施例的医疗器械的一部分的侧视图示意图。具体来说,图9示出了联接到第一缆线4420和第二缆线4430的主动轮组件4710。主动轮组件4710可以包括在本文所述的任何机械结构或医疗器械中。
86.如图所示,主动轮组件4710包括输入盘4760、第一缆线卷筒4711和第二缆线卷筒4712。主动轮组件4710还限定主动轮轴线ac,主动轮组件4710绕该主动轮轴线旋转。因此,
当机械结构联接在手术系统(未示出)内时,输入盘4760接合致动器(未示出)。致动器可以向输入盘4760中产生旋转输入,以使主动轮组件4710绕主动轮轴线ac旋转,如图9中的箭头ff所示。第一缆线卷筒4711(其用作第一驱动构件)联接到第一缆线4420并且具有第一半径(或尺寸)。第一缆线卷筒4711限定了与主动轮轴线ac同心的第一中心线cl1。因此,当主动轮组件4710绕主动轮轴线ac旋转时,第一缆线卷筒4711绕其中心线cl1旋转。第二缆线卷筒4712(其用作第二驱动构件)联接到第二缆线4430并且具有不同于第一半径(或尺寸)的第二半径(或尺寸)。尽管第二半径被示为大于第一半径,但在另一些实施例中,第二半径可以小于第一半径。第二缆线卷筒4712限定了与主动轮轴线ac不同心的第二中心线cl2。因此,当主动轮组件4710绕主动轮轴线ac旋转时,第二缆线卷筒4712不绕其中心线cl2旋转。这种布置可以产生第二缆线卷筒4712的偏心运动。
87.在第一缆线4420和第二缆线4430各自联接到主动轮组件4710和腕部(未示出,但可以与腕部2500类似)的情况下,主动轮组件4710的旋转移动可以导致第一缆线4420和第二缆线4430移动从而操作腕部。具体地,主动轮组件4710绕主动轮轴线ac的旋转导致第一缆线卷筒4711绕第一中心线cl1旋转并且第二缆线卷筒4712绕偏离第二中心线cl2的轴线旋转。第一缆线卷筒4711的旋转导致第一缆线4420的近端部分4421沿方向gg移动,如图9所示。类似地,第二缆线卷筒4712的旋转导致第二缆线4430的近端部分4431沿方向hh移动,如图9所示。因为第一缆线卷筒4711的尺寸(例如半径)不同于第二缆线卷筒4712的尺寸,所以主动轮组件4710旋转通过特定角位移导致第一缆线4420的近端部分4421移动第一距离并导致第二缆线4430的近端部分4431移动不同的第二距离。类似地,主动轮组件4710以特定角速度旋转导致第一缆线4420的近端部分4421以第一线速度移动并且第二缆线4430的近端部分4431以不同的第二线速度移动。另外,因为第二中心线cl2偏离旋转轴线(即,主动轮轴线ac),所以第二缆线的线性移动大于如果第二中心线cl2与旋转轴线同心时的移动。
88.尽管主动轮组件2710、3710和4710被显示和描述为包括联接到并驱动两根(或更多根)缆线的两个缆线卷筒,但在另一些实施例中,主动轮组件可以包括用于驱动两根(或更多根)缆线的任何合适的驱动构件或机构。例如,在一些实施例中,主动轮组件可以包括(本文描述的类型的)一个或多个缆线卷筒、(间接联接到缆线的)一个或多个齿轮、或缆线卷筒和齿轮的任何组合。其他驱动构件可以包括链轮、皮带驱动系统或其他机构,主动轮组件可以通过这些机构驱动一组缆线。例如,图10是根据实施例的机械结构5700的一部分的侧视图示意图。机械结构5700包括驱动第一缆线5420和第二缆线5430的主动轮组件5710和传送构件5742。机械结构5700及其任何部件(例如,主动轮组件5710和传送构件5742)可以包括在本文所述的任何机械结构或医疗器械中。
89.如图所示,主动轮组件5710包括输入盘5760、第一驱动构件5711和第二驱动构件5712。主动轮组件5710还限定了主动轮组件5710绕其旋转的第一轴线a1。因此,当机械结构联接在手术系统(未示出)内时,输入盘5760接合致动器(未示出)。致动器可以向输入盘5760中产生旋转输入,以使主动轮组件5710绕第一轴线a1旋转,如图10中的箭头ii所示。第一驱动构件5711是具有第一尺寸(例如,半径)的缆线卷筒,其联接到第一缆线5420的近端部分5721。第二驱动构件5712是具有第二半径(例如,尺寸)的驱动齿轮,如下所述,其间接联接到第二缆线5430的近端部分5731。
90.传送构件5742包括从动齿轮5743和卷筒部分5744。传送构件5742还限定了传送构
件5742绕其旋转的第二轴线a2。传送构件5742的卷筒部分5744具有第二尺寸(例如,半径)并且联接到第二缆线5430的近端部分5731。从动齿轮5743与主动轮组件5710的驱动齿轮5712接合。因此,主动轮组件5710的旋转移动导致第一缆线5420和第二缆线5430移动,从而操作腕部(未示出)。具体地,主动轮组件5710绕第一轴线a1的旋转导致缆线卷筒5711绕第一轴线a1旋转,从而使第一缆线5420的近端部分5421沿方向jj移动,如图10所示。主动轮组件5710绕第一轴线a1的旋转也导致驱动齿轮5712旋转。驱动齿轮5712与从动齿轮5743接合,并因此传送构件5742绕第二轴线a2旋转,如箭头kk所示。传送构件5742的旋转导致卷筒部分5744绕第二轴线a2旋转,从而使第二缆线5430的近端部分5431沿方向ll移动。
91.由于驱动齿轮5712的尺寸与从动齿轮5743的尺寸不同,因此传送构件5742的旋转速度将与主动轮组件5710的旋转速度不同。同理,驱动齿轮5712与从动齿轮5743之间的齿轮比会导致传送构件5742与主动轮组件5710的旋转速度之间存在差异。例如,如果齿轮比为2:1(即,驱动齿轮5712的尺寸是从动齿轮5743的两倍),则传送构件5742的旋转速度将是主动轮组件5710的两倍。然而,如果齿轮比为1:1(即,如果齿轮具有相同的尺寸),则传送构件5742的旋转速度将与主动轮组件5710的相同。此外,第一缆线5420移动通过的速度(和距离)是第一驱动构件5711的尺寸(例如,半径)的函数,并且第二缆线5430移动通过的速度(和距离)是传送构件5742的卷筒部分5744的尺寸的函数。因此,第一缆线5420的速度和距离不同于第二缆线5430的速度和距离。
92.尽管第一缆线5420的近端部分5421被示为沿第一方向退出第一驱动构件5711,并且第二缆线5430的近端部分5431被示为沿相反的第二方向退出卷筒部分5744,但在另一些实施例中,第一缆线5420和第二缆线5430可以沿任何合适的方向退出。例如,在另一些实施例中,第一缆线5420和第二缆线5430可以沿相同方向退出。在又一些实施例中,第一缆线5420和第二缆线5430可以沿彼此正交的方向(即,相隔90度)退出。
93.尽管传送构件5742被示为圆柱形或包括圆柱形的从动齿轮5743,但在另一些实施例中,本文所述的任何机械结构都可以包括任何合适的传送构件,使得主动轮组件(或机械结构)可以移动多根缆线通过不同的距离或通过一次旋转输入使多根缆线以不同的速度移动。例如,在一些实施例中,传送构件可以是推动或拉动缆线的杠杆,并且不包括缆线缠绕在其上的缆线卷筒。在一些实施例中,传送构件可以包括扇形齿轮(即,仅沿其圆周的一部分具有齿的齿轮)。例如,图11是根据实施例的机械结构6700的一部分的侧视图示意图。机械结构6700包括通过单次输入驱动第一缆线6420和第二缆线6430的主动轮组件6710和传送构件6742。机械结构6700及其任何部件(例如,主动轮组件6710和传送构件6742)可以包括在本文所述的任何机械结构或医疗器械中。
94.主动轮组件6710包括输入盘(未示出,但可类似于上述输入盘5760)、第一驱动构件6711和第二驱动构件6712。主动轮组件6710还限定了主动轮组件6710绕其旋转的第一轴线a1。因此,当机械结构联接在手术系统(未示出)内时,输入盘接合致动器(未示出)。致动器可以向输入盘6760中产生旋转输入,以使主动轮组件6710绕第一轴线a1旋转。第一驱动构件6711是具有第一尺寸(例如,半径)的缆线卷筒,其联接到第一缆线6420的近端部分6721。第二驱动构件6712是具有第二半径(或尺寸)的驱动齿轮,如下所述,其间接联接到第二缆线6430的近端部分6731。
95.传送构件6742为杠杆,其包括扇形齿轮6743和连接部分6744。传送构件6742绕第
二轴线a2旋转,第二轴线a2可定义为机械结构内的销连接。传送构件6742的连接部分6744联接到第二缆线6430的近端部分6731。扇形齿轮6743与主动轮组件6710的驱动齿轮6712接合。因此,主动轮组件6710的旋转移动导致第一缆线6420和第二缆线6430移动,从而操作腕部(未示出)。具体地,主动轮组件6710绕第一轴线a1的旋转导致缆线卷筒6711绕第一轴线a1旋转,从而使第一缆线6420的近端部分6421沿方向mm移动,如图11所示。主动轮组件6710绕第一轴线a1的旋转也导致驱动齿轮6712旋转。驱动齿轮6712与扇形齿轮6743接合,并因此传送构件6742绕第二轴线a2旋转。传送构件6742的旋转导致连接部分6744绕第二轴线a2旋转,从而使第二缆线6430的近端部分6431沿方向nn移动。
96.由于驱动齿轮6712的尺寸与扇形齿轮6743的尺寸不同,因此传送构件6742的旋转速度将与主动轮组件6710的旋转速度不同。同理,驱动齿轮6712与从动齿轮6743之间的齿轮比会导致传送构件6742与主动轮组件6710的旋转速度之间存在差异。例如,如果齿轮比为1:3(即,驱动齿轮6712的尺寸是扇形齿轮6743的尺寸三分之一),则主动轮组件6710的旋转速度将是传送构件6742的三倍。此外,第一缆线6420移动通过的速度(和距离)是第一驱动构件6711的尺寸(例如,半径)的函数,并且第二缆线6430移动通过的速度(和距离)是尺寸(即,连接部分6744和第二轴线a2之间的杠杆臂距离)的函数。因此,第一缆线6420的速度和距离不同于第二缆线6430的速度和距离。
97.图12-34是根据实施例的器械7400的各种视图。在一些实施例中,器械7400或其中的任何部件可选地是执行手术程序的手术系统的零件,并且其可以包括操纵器单元、一系列运动学联动机构、一系列插管或诸如此类。器械7400(以及本文所述的任何器械)可以用于任何合适的手术系统,例如上文示出和描述的mirs系统1000。器械7400包括机械结构7700、轴7410、腕部组件7500、末端执行器7460和缆线组。该组缆线包括将机械结构7700联接到腕部组件7500的八根缆线。为了清楚起见,在本文中仅标识和描述了八根缆线中的四根(参见例如图17,其示出了第一缆线7420、第二缆线7430的、第三缆线7440和第四缆线7450)。该组缆线还包括将机械结构7700联接到末端执行器7460的两根缆线(参见例如图26和图28,它们示出了第五缆线7455和第六缆线7456)。器械7400被配置为使得第一缆线7420、第二缆线7430、第三缆线7440和第四缆线7450的移动产生腕部组件7500内的连杆绕第一俯仰旋转轴线a
p1
和第二俯仰旋转轴线a
p2
的旋转(即,俯仰旋转)(参见图25,术语俯仰是任意的)、腕部组件7500内的连杆绕第一偏航旋转轴线a
y1
和第二偏航旋转轴线a
y2
的旋转(即,偏航旋转)(参见图26和图27,术语偏航是任意的)或这些移动的任何组合。第五缆线7455和第六缆线7456的移动产生末端执行器7460的致动(例如,握持、切割旋转或缝合臂移动)。尽管末端执行器7460被示为用作缝合机构的针驱动器,但在另一些实施例中,器械7400可包括任何合适的末端执行器,例如切割工具、烧灼器械、夹持器或诸如此类。
98.第一缆线7420包括近端部分7421和远端部分7422,第二缆线7430包括近端部分7431和远端部分7432,第三缆线7440包括近端部分7441和远端部分7442,并且第四缆线7450包括近端部分7451和远端部分7452。缆线的近端部分联接在机械结构7700(参见例如图14-17)内,并且缆线的远端部分联接到腕部组件7500(参见例如图25-28)。第五缆线7455和第六缆线7456还各自具有联接在机械结构内的近端部分(未标识)和联接到末端执行器7460的远端部分(未标识)。缆线可以由任何合适的材料形成。例如,在一些实施例中,本文所述的任何缆线都可以由钨股线形成。在另一些实施例中,本文所述的任何缆线可以由超
高分子量聚乙烯(uhmwpe)纤维形成。
99.轴7410可以是将腕部组件7500联接到机械结构7700的任何合适的细长轴。具体地,轴7410包括联接到机械结构7700的近端7411和联接到腕部组件7500(例如,腕部组件7500的第一连杆7510)的远端7412。轴7410限定了管腔(未示出)或多个通道,缆线和其他部件(例如,电线、地线或诸如此类)可以通过所述管腔或通道从机械结构7700布线到腕部组件7500。
100.机械结构7700包括底盘7770(其用作底座)、第一安装支架7775、第二安装支架7776和可旋转地安装到底盘的一组主动轮。底盘7770、第一安装支架7775和第二安装支架7776提供结构支撑以用于在机械结构7700中安装和对齐部件(例如,主动轮)。例如,底盘7770限定了轴开口,轴7410的近端7411安装在该轴开口内。如图20所示,底盘7770进一步限定了一个或多个开口7771,主动轮安装在开口7771内并且经由轴承7706可旋转地支撑。第二安装支架7776还包括一个或多个开口7772,主动轮安装在开口7772内(并且还经由轴承7706可旋转地支撑)。底盘7770的开口7771与第二安装支架7776的开口7772轴向对齐。除了为机械结构7700的内部部件提供安装支撑之外,底盘7770还可以包括与驱动设备(未示出)的对接端口相接的外部特征(例如,凹槽、夹子等)。驱动设备可以是例如手持系统或计算机辅助远程操作系统,其可以接收器械7400并操纵器械7400以进行各种外科手术。驱动设备可以包括一个或多个马达以驱动机械结构7700的主动轮。在另一些实施例中,驱动设备可以是可以接收和操纵器械7400以进行各种手术的组件。在一些实施例中,机械结构7700包括附接到底盘7770的盖(未示出)。盖可以部分地封闭或完全封闭设置在机械结构7700内的部件。
101.机械结构7700包括第一主动轮组件7710、第二主动轮组件7720、第三主动轮组件7730和滚动驱动组件7740。如本文所述,第一主动轮组件7710和第二主动轮组件7720各自被配置为移动联接到腕部组件以操作腕部组件2500(例如,以绕俯仰轴线、偏航轴线或俯仰轴线和偏航轴线的组合旋转腕部组件的各种连杆)的四根缆线。因此,腕部组件7500可以被称为八索腕部。具体地,第一主动轮组件7710被配置为移动第一缆线7420、第二缆线7430、第三缆线7440和第四缆线7450,如本文中详细描述的。由于第二主动轮组件7720的结构和功能与第一主动轮组件7710相似,因此不再单独描述。第三主动轮组件7730被配置为移动第五缆线7455和第六缆线7456以操作末端执行器7460。滚动驱动组件7740被配置为使轴7410绕其中心线(其用作滚动轴线;术语滚动是任意的)旋转。
102.第一主动轮组件7710包括限定主动轮轴线a1的轴7715、输入盘7760、第一缆线卷筒7711、第二缆线卷筒7712、第三缆线卷筒7713和第四缆线卷筒7714。如图17所示,当主动轮组件7710绕主动轮轴线a1旋转时,如箭头pp所示,第一缆线卷筒7711用作第一驱动构件以移动第一缆线7420的近端部分7421。如图22所示,输入盘7760限定了第一驱动凸爪接受器7761和第二驱动凸爪接受器7761。输入盘7760还包括一组突起7763。当器械7400联接在手术系统内时,致动器(未示出)可以接合输入盘7760以向第一主动轮组件7710提供旋转输入。具体地,致动器的驱动凸爪可以配合地装配在驱动凸爪接受器7761、7762内以传递来自致动器的扭矩,从而使第一主动轮组件7710绕旋转轴线a1旋转。突起7763可用于手动旋转主动轮组件7710。
103.如图20和图21所示,第一缆线卷筒7711联接到输入盘7760并且固定地联接到轴
7715的下轴构件7716。在一些实施例中,第一缆线卷筒7711和输入盘7760可以整体构造。在另一些实施例中,第一缆线卷筒7711和输入盘7760可以分开构造并且随后联接到下轴构件7716。参考图18和图19,第一缆线卷筒7711包括端接于第一连接开口7755的第一组缆线缠绕槽7751。第一缆线7420的近端部分7421绕第一缆线卷筒7711缠绕在缆线缠绕槽7751内,并通过固定在第一连接开口7755内的卷曲或连接部分(未示出)联接到第一缆线卷筒7711。
104.当主动轮组件7710绕主动轮轴线a1旋转时,第二缆线卷筒7712用作第二驱动构件以移动第二缆线7430的近端部分7431。如图20和图21所示,第二缆线卷筒7712通过第二夹具7702(其用两个螺钉7705固定)固定地联接到轴7715的下轴构件7716。第二缆线卷筒7712包括限定卡环槽7765的轴连接部分7764。轴连接部分7764接收并联接到上轴构件7717。以这种方式,第二缆线卷筒7712联接到下轴构件7716和上轴构件7717两者并将它们固定在一起。在另一些实施例中,轴7715不需要由两件构成,而是可以是单件。第二缆线卷筒7712由轴承7706可旋转地支撑在第二安装支架7776中,轴承7706由卡环7707固定(见图21)。参考图18和图19,第二缆线卷筒7712包括端接于第二连接开口(未示出,但可以类似于第一连接开口7755)的第二组缆线缠绕槽7752。第二缆线7430的近端部分7431绕第二缆线卷筒7712缠绕在缆线缠绕槽7752内,并且通过固定在第二连接开口内的卷曲或连接部分(未示出)联接到第二缆线卷筒7712。
105.如图17所示,第一缆线7420的近端部分7421绕第一缆线卷筒7711的第一侧(或沿第一缠绕方向)缠绕,并且第二缆线7430的近端部分7431绕第二缆线卷筒7712的相反的第二侧(或沿相反的第二缠绕方向)缠绕。以这种方式,主动轮组件7710绕主动轮轴线a1的旋转使第一缆线7420沿第一方向移动并使第二缆线7430沿相反的第二方向移动。这导致在第二缆线7430正在放出的同时拉入第一缆线7420,反之亦然。此外,如图20所示,第一缆线卷筒7711和第二缆线卷筒7712各自具有第一半径r1。因此,主动轮组件7710以特定角速度旋转导致第一缆线7420的近端部分7421和第二缆线7430的近端部分7431以相同的线速度移动通过相同的距离。这种布置可以有助于在第一缆线7420和第二缆线7430中保持期望的张力,以防止缆线中的松弛脱轨并且防止缆线中的过度张力使其他部件变形或损坏。这有时被称为缆线长度守恒。
106.第二缆线卷筒7712独立于第一缆线卷筒7711联接到轴7715。这可以允许,在器械7400的组装过程中,第二缆线卷筒7712在轴7715上的角位置相对于第一缆线卷筒7711在轴7715上的角位置进行调整。具体地,在组装过程中,第一缆线7420可以从腕部组件7500布线并且联接到第一缆线卷筒7711。第一缆线卷筒7711和/或下轴构件7716可以旋转以将第一缆线7420中的张力调节到期望的量。在第一缆线卷筒7711处于固定位置的情况下,第二缆线7430可以从腕部组件7500布线并且联接到第二缆线卷筒7712。第二缆线卷筒7712可以相对于第一缆线卷筒7711和下部轴构件7716旋转,以将第二缆线7430中的张力调节到期望的量。然后可以通过第二夹具7702将第二缆线卷筒7712固定到下轴构件7716以保持缆线张力。
107.当主动轮组件7710绕主动轮轴线a1旋转时,第三缆线卷筒7713用作第三驱动构件以移动第三缆线7440的近端部分7441。如图20和图21所示,第三缆线卷筒7713通过第三夹具7703(其用两个螺钉7705固定)固定地联接到轴7715的上轴构件7717。第三缆线卷筒7713独立于第一缆线卷筒7711和第二缆线卷筒7712联接到轴7715。这可以允许,在器械7400的
组装过程中,第三缆线卷筒7713在轴7715上的角位置以与上述类似的方式相对于第一缆线卷筒7711和第二缆线卷筒7712的角位置进行调整。参考图18和图19,第三缆线卷筒7713包括端接于第三连接开口(未示出,但可以类似于第一连接开口7755)的第三组缆线缠绕槽7753。第三缆线7440的近端部分7441绕第三缆线卷筒7713缠绕在缆线缠绕槽7753内,并且通过固定在第二连接开口内的卷曲或连接部分(未示出)联接到第三缆线卷筒7713。
108.当主动轮组件7710绕主动轮轴线a1旋转时,第四缆线卷筒7714用作第四驱动构件以移动第四缆线7450的近端部分7451。如图20和图21所示,第四缆线卷筒7714通过第四夹具7704(其用两个螺钉7705固定)固定地联接到轴7715的上轴构件7717。第四缆线卷筒7714独立于第一缆线卷筒7711、第二缆线卷筒7712和第三缆线卷筒7713联接到轴7715。这可以允许,在器械7400的组装过程中,第四缆线卷筒7714在轴7715上的角位置以与上述类似的方式相对于第三缆线卷筒7713(以及其他两根第一缆线)的角位置进行调整。参考图18和图19,第四缆线卷筒7714包括端接于第四连接开口7758的第四组缆线缠绕槽7754。第四缆线7450的近端部分7451绕第四缆线卷筒7714缠绕在缆线缠绕槽7754内,并通过固定在第四连接开口7758内的卷曲或连接部分(未示出)联接到第四缆线卷筒7714。
109.如图15和图17所示,第三缆线7440的近端部分7441绕第三缆线卷筒7713的第一侧(或沿第一缠绕方向)缠绕,并且第四缆线7450的近端部分7451绕第四缆线卷筒7714的相反的第二侧(或沿相反的第二缠绕方向)缠绕。以这种方式,主动轮组件7710绕主动轮轴线a1的旋转使第三缆线7440沿第一方向移动并使第四缆线移动7450沿相反的第二方向移动。这导致在第四缆线7450正在放出的同时拉入第三缆线7440,反之亦然。此外,如图20所示,第三缆线卷筒7713和第四缆线卷筒7714各自具有第二半径r2。因此,主动轮组件7710以特定角速度旋转导致第三缆线7440的近端部分7441和第四缆线7450的近端部分7451以相同的线速度移动通过相同的距离。这种布置可以有助于在第三缆线7440和第四缆线7450中保持期望的张力,以防止缆线中的松弛脱轨并且防止缆线中的过度张力使其他部件变形或损坏。
110.因为第一半径r1小于第二半径r2,所以主动轮组件7710旋转通过特定角位移导致第一缆线7420和第二缆线7730移动第一距离并且导致第三缆线7440和第四缆线7450移动大于第一距离的第二距离。类似地,主动轮组件7710以特定角速度旋转导致第一缆线7420和第二缆线7730以第一线速度移动并且导致第三缆线7440和第四缆线7450以大于第一速度的第二线速度移动。第一距离与第二距离(以及第一线速度与第二线速度)之差与第一半径r1与第二半径r2之差有关。例如,如果第二半径r2与第一半径r1之间的比率为2:1,则第三缆线7440和第四缆线7450移动的距离以及第三缆线7440和第四缆线7450移动的线速度将是第一缆线7420和第二缆线7430的两倍。
111.这种布置可以有利地允许第一主动轮组件7710通过单次旋转输入产生不同量的缆线移动或缆线速度。缆线移动的不同特性可以改善腕部7500的操作。具体地,如下文更详细地描述,第一缆线7420和第二缆线7430端接于腕部组件7500的第三连杆7530并且仅控制第二连杆7520(绕第一俯仰轴线a
p1
)和第三连杆(绕第一偏航轴线a
y1
)的旋转。相反,第三缆线7440和第四缆线7450端接于腕部组件7500的第五连杆7550,并控制第四连杆7540(绕第二俯仰轴线a
p2
)和第五连杆(绕第二偏航轴线a
y2
)的旋转。由于第三缆线7440和第四缆线7450穿过腕部组件7500的所有连杆布线,所以第三缆线7440和第四缆线7450的缆线路径比
第一缆线7420和第二缆线7430的缆线路径更长。因此,当腕部组件7500从第一(或直线)配置(图25和图26)移动到第二(或弯曲)配置(图27)时,第三缆线7440和第四缆线7450将以比第一缆线7420和第二缆线7430更快的速度移动更长的距离。第一主动轮组件7710可以有利地通过单次旋转输入产生所有四根缆线的期望移动,从而保留机械结构7700中的空间,并且允许机械结构7700由现有接口驱动。
112.第二半径r2和第一半径r1之间的比率可以是任何合适的值(例如,以适应缆线之间在缆线路径长度方面的差异)。例如,在一些实施例中,第二半径r2和第一半径r1之间的比率在1.5:1和2.5:1之间。在另一些实施例中,第二半径r2和第一半径r1之间的比率在1.5:1和2:1之间。在又一些实施例中,第二半径r2和第一半径r1之间的比率约为1.8:1。此外,尽管第二半径r2被示为大于第一半径r1,但在另一些实施例中,第二半径r2可以小于第一半径r1。在又一些实施例中,第二半径r2可以与第一半径r1具有相同的尺寸。在这样的实施例中,缆线将以基本相同的速度移动,从而导致腕部的部分以相对于彼此不同的速度(或量)旋转。
113.缆线的近端部分被布线穿过机械结构7700并通过两组滑轮进入轴7410。如图15所示,机械结构7700包括由第一安装支架7775支撑的第一组滑轮,第一组滑轮将第一缆线7420的近端部分7421和第二缆线7430的近端部分7431布线到轴7410中。第一组滑轮更清楚地示出在图16和图17中,为了清楚起见,图16和图17示出了移除了第一安装支架7775和第二安装支架7776的机械结构。具体地,第一组滑轮包括第一滑轮7791、第二滑轮7792和第三滑轮7796。第一缆线7420从第一缆线卷筒7711围绕第一滑轮7791布线并进入轴7410。第二缆线7430从第二缆线卷筒7712围绕第三滑轮7796、第二滑轮7792布线并进入轴7410。类似地,机械结构7700包括由第二安装支架7776支撑的第二组滑轮,第二组滑轮将第三缆线7440的近端部分7441和第四缆线7450的近端部分7451布线到轴7410中。第一组滑轮更清楚地示出在图15和图17中,为了清楚起见,图15和图17示出了移除了第二安装支架7776的机械结构。具体地,第二组滑轮包括第四滑轮7781、第五滑轮7782和第六滑轮7786。第三缆线7440从第三缆线卷筒7713围绕第四滑轮7781布线并进入轴7410中。第四缆线7450从第四缆线卷筒7714围绕第六滑轮7786、第五滑轮7782布线并进入轴7410中。这种布线确保缆线被布线到轴7410内的期望位置(例如,相对于轴中心线)。具体地,第一缆线7420、第二缆线7430、第三缆线7440和第四缆线7450可以定位在轴内、与轴中心线间隔开并且在轴7410内的不同径向或周向位置处。这种布置可以减少缆线在轴7410内相互纠缠(例如,绞绕)的可能性。
114.腕部组件7500及其部件在图25-34中示出。腕部组件7500包括五个连杆,它们可旋转地联接在一起,并将末端执行器7460联接到轴7410的远端部分7412。如本文所述,腕部组件7500的连杆绕多个旋转轴线相对于彼此(以及轴7410)旋转以产生期望的自由度。具体地,腕部组件7500被配置为产生反曲运动(参见图27)。腕部组件7500包括第一连杆7510、第二连杆7520、第三连杆7530、第四连杆7540和第五连杆7550。所述连杆中的每一个具有近端部分和远端部分。第一连杆7510的近端部分联接到轴7410。如图25所示,第一连杆7510的远端部分可旋转地联接到第二连杆7520的近端部分,使得第二连杆7520和第一连杆7510能够绕第一俯仰轴线a
p1
(术语俯仰是任意的)相对于彼此旋转。更具体地,如图29和图30所示,第一连杆7510包括两个滚动表面7513和两组齿7514。滚动表面7513与第二连杆7520的相应近侧滚动表面7523(见图32)接合,并且所述两组齿7514与第二连杆7520的相应组的齿7524啮
合。本文中描述的任何一组齿和滚动表面可以与名称为“具有增强的运动范围的机械腕部接头以及相关设备和方法(mechanical wrist joints with enhanced range of motion,and related devices and methods)”的美国专利申请公布no.us 2017/0120457 a1(于2015年2月20日提交)中示出和描述的那些类似,该申请公布的全部内容通过引用并入本文。因为第一连杆7510和第二连杆7520之间的接头不是销接接头,所以在第二连杆7520旋转期间,第一俯仰轴线a
p1
将相对于第一连杆7510移动。
115.如图26所示,第二连杆7520的远端部分可旋转地联接到第三连杆7530的近端部分,使得第三连杆7530和第二连杆7520可以绕正交于第一俯仰轴线a
p1
的第一偏航轴线a
y1
(术语偏航是任意的)相对于彼此旋转。如图31所示,第二连杆7510的远端部分包括两个远侧滚动表面7527和两组齿7528。远侧滚动表面7527与第三连7530杆的相应近侧滚动表面7533(见图28)接合,并且所述两组齿7528与第三连杆7530的相应组的齿(未标识)啮合。由于第二连杆7520和第三连杆7530之间的接头不是销接接头,因此在第三连杆7530旋转期间,第一偏航轴线a
y1
将相对于第二连杆7520移动。
116.以类似的方式,第三连杆7530的远端部分可旋转地联接到第四连杆7540的近端部分,使得第四连杆7540和第三连杆7530能够绕第二俯仰轴线a
p2
相对于彼此旋转。第三连杆7530和第四连杆7540的结构与第二连杆7520的结构(如图31和图32所示)基本相似,因此本文中不再单独描述第三连杆7530和第四连杆7540的细节。参考图28,第三连杆7510包括两个滚动表面7537和两组齿7538(其类似于第二连杆7520的滚动表面7527和齿7528)。滚动表面7537与第四连杆7540的相应近侧滚动表面接合,并且所述两组齿7538与第四连杆7540的相应组的齿啮合。因为第三连杆7530和第四连杆之间的接头7540不是销接接头,所以在第四连杆7540旋转期间,第二俯仰轴线a
p2
将相对于第三连杆7530移动。以类似的方式,第四连杆7540的远端部分可旋转地联接到第五连杆7550的近端部分,使得第五连杆7550和第四连杆7540能够绕第二偏航轴线a
y2
相对于彼此旋转。参考图34,第五连杆包括两个滚动表面7557和两组齿7558(其类似于第二连杆7520的滚动表面7523和齿7524)。
117.如图所示,腕部组件7500的连杆包括多对连杆,它们绕交替的法向轴线相对于彼此旋转。具体地,腕部组件7500的连杆绕第一第一俯仰轴线a
p1
、第一偏航轴线a
y1
、第二俯仰轴线a
p2
和第二偏航轴线a
y2
旋转。因此,腕部组件7500被称为具有“俯仰-偏航-俯仰-偏航”配置。然而,在另一些实施例中,腕部组件7500(或本文所述的任何腕部组件)可以被配置为具有“俯仰-偏航-偏航-俯仰”配置或“偏航-俯仰-俯仰-偏航”配置。
118.缆线通过一系列用作导向孔的缆线开口穿过腕部组件7500的连杆布线并联接到腕部组件7500的连杆。如图30所示,第一连杆包括四个内部缆线开口7515和四个外部开口7516。类似地,第二连杆7520包括四个内部缆线开口7525和四个外部开口7526。端接于第三连杆7530的四根缆线(即,四个较短的缆线)穿过四个内部缆线开口7515、7525布线。具体地,如图28所示,第一缆线7420的远端部分7422和第二缆线7430的远端部分7432穿过内部缆线开口7515、7525布线。端接于第五连杆7550的四根缆线(即,四根较长的缆线)穿过四个外部缆线开口7516、7526布线。具体地,如图28所示,第三缆线7440的远端部分7442和第四缆线7450的远端部分7452穿过外部缆线开口7516、7526布线。第五连杆7550仅包括四个外部缆线开口7556(较长的第三缆线7440和第四缆线7450穿过所述开口布线)。第五连杆7550还包括四个端接开口7559,所述端接开口用于将四根较长缆线(包括第三缆线7440和第四
缆线7450)的端部固定地联接到第五连杆7550。
119.参考图28,第一缆线7420的远端部分7422联接到第三连杆7530并端接于第三连杆7530。第一缆线7420经由内部缆线开口7515、7525穿过腕部组件7500布线并进入轴7410。如上所述,第一缆线7420的近端部分7421在机械结构7700内(例如,经由滑轮7791)布线并且缠绕在(并联接到)第一缆线卷筒7711上。第二缆线7430的远端部分7432联接到第三连杆7530并端接于第三连杆7530。第二缆线7430经由内部缆线开口7515、7525穿过腕部组件7500布线并进入轴7410。第二缆线7430的近端部分7431在机械结构7700内布线(例如,经由滑轮7792)并且缠绕在(并联接到)第二缆线卷筒7712上。因此,第一缆线7420和第二缆线7430(以及联接到第二主动轮组件7720的第一和第二缆线卷筒的相应短缆线)引起第一连杆7710、第二连杆7720和第三连杆7730绕第一俯仰轴线a
p1
和第一偏航轴线a
y1
的旋转。尽管在另一些实施例中第一缆线7420的远端7422被示为与另一根缆线(例如,近端联接至第二主动轮组件7720的缆线)的远端联接在一起,但是第一缆线7420的远端7422可以具有单独的端接部分(例如,卷曲)。类似地,尽管在另一些实施例中第二缆线7430的远端7432被示为与另一根缆线(例如,近端联接到第二主动轮组件7720的缆线)的远端联接在一起,但是第二缆线7430的远端7432可以具有单独的端接部分(例如,卷曲)。此外,在另一些实施例中,第一缆线7420的远端7422和第二缆线7430的远端7432可以联接在一起(即,第一缆线7420和第二缆线7430可以是缆线环的两个部分)。
120.第三缆线7440的远端部分7442联接到第五连杆7550并端接于第五连杆7550。第三缆线7440经由外部缆线开口7516、7526穿过腕部组件7500布线并进入轴7410。第三缆线7440的近端部分7441在机械结构7700内布线(例如,经由滑轮7781)并且缠绕在(并联接到)第三缆线卷筒7711上。第四缆线7450的远端部分7452联接到第五连杆7550并端接于第五连杆7550。第四缆线7450经由外部缆线开口7516、7526穿过腕部组件7500布线并进入轴7410。第四缆线7450的近端部分7451在机械结构7700内布线(例如,经由滑轮7782)并缠绕在(并联接到)第四缆线卷筒7714上。因此,第三缆线7440和第四缆线7450(以及联接到第二主动轮组件7720的第三和第四缆线卷筒的相应长缆线)导致所有连杆绕腕部组件7500的所有四条轴线旋转。第一俯仰轴线a
p1
和第一偏航轴线a
y1
。因此,第三缆线7440和第四缆线7450的缆线路径比第一缆线7420和第二缆线7430的缆线路径长。因此,当腕部组件7500从第一(或直线)配置(图25和图26)移动到第二(或弯曲)配置(图27)时,第三缆线7440和第四缆线7450将比第一缆线7420和第二缆线7430以更快的速度移动更长的距离。
121.如上所述,在第一缆线7420、第二缆线7430、第三缆线7440和第四缆线7450各自联接到腕部组件7500和第一主动轮组件7710的情况下,第一主动轮组件7710绕第一主动轮轴线a1的旋转移动使第一缆线7420和第二缆线7430以第一速度移动(并且通过第一距离)并且使第三缆线7440和第四缆线7450以第二速度移动(并且通过第二距离),从而操作腕部2500。以这种方式,腕部组件7500可以在其第一(或直线)配置(图26)、其第二(或弯曲)配置(图27)和涉及绕腕部组件7500的任何一条轴线旋转的配置之间移动。第一主动轮组件7710和第二主动轮组件7720的布置可以有利地允许单主动轮组件产生不同量的缆线移动或缆线速度。不同的缆线运动特性可以改进腕部组件7500的操作。第一主动轮组件7710(以及本文所述的其他主动轮组件)可以利用单次输入产生期望的不同量的移动(或缆线速度),从而保留机械结构7700中的空间。
122.虽然上面已经描述了各种实施例,但应当理解,它们仅作为示例而不是限制的方式呈现。在上述方法和/或示意图指示以特定顺序发生的特定事件和/或流模式的情况下,可以修改特定事件和/或操作的排序。虽然已经具体示出和描述了实施例,但是应当理解,可以在形式和细节方面进行各种改变。
123.例如,本文所述的任何器械(以及其中的部件)可选地是执行微创手术程序的手术组件的零件,并且其可以包括操纵器单元、一系列运动学联动机构、一系列插管或诸如此类。因此,本文所述的任何器械都可以用于任何合适的手术系统,例如上文示出和描述的mirs系统1000。此外,本文示出和描述的任何器械都可用于在手术程序过程中操纵靶组织。这样的靶组织可以是癌细胞、肿瘤细胞、病变、血管闭塞、血栓形成、结石、子宫肌瘤、骨转移瘤、子宫腺肌病或任何其他身体组织。所呈现的靶组织示例并非详尽无遗。此外,靶结构还可以包括在身体内或与身体相关联的人造物质(或非组织),举例来说,诸如支架、人造管的一部分、身体内的紧固件等。
124.例如,任何腕部或工具构件可以由任何材料构成,例如医疗级不锈钢、镍合金、钛合金等。此外,本文所述的任何连杆、工具构件、受拉构件或部件都可以由随后连结在一起的多个部件构成。例如,在一些实施例中,可以通过将单独构造的部件连结在一起来构造连杆。然而,在另一些实施例中,本文所述的任何连杆、工具构件、受拉构件或部件都可以整体构造。
125.本文所述的任何缆线都可以由任何合适的材料形成。例如,在一些实施例中,本文所述的任何缆线都可以由钨股线形成。在另一些实施例中,本文所述的任何缆线可由超高分子量聚乙烯(uhmwpe)纤维形成。在一些实施例中,本文所述的任何缆线都可以由单股或纤维构成。在另一些实施例中,本文所述的任何缆线可由编织或以其他方式连结在一起以形成缆线的多根纤维构成。在一些实施例中,本文所述的任何缆线可包括涂层或其他表面处理以增强缆线的摩擦特性。这种增强的摩擦特性可有助于便于缆线缠绕在本文所述的主动轮组件或缆线卷筒上。
126.尽管器械7400的缆线(例如,第一缆线7420)被显示和描述为通过固定在连接开口(例如,第一连接开口7755)内的卷曲联接到它们各自的缆线卷筒(例如,第一缆线卷筒7711),但在另一些实施例中,本文所述的任何缆线可以通过任何合适的机制(例如,通过以防止滑动的方式将缆线缠绕在缆线卷筒上或通过粘合剂)联接到主动轮。
127.尽管本文将医疗器械描述为包括一根或多根缆线,但在另一些实施例中,本文描述的任何医疗器械可包括用于操作腕部或末端执行器的任何合适的受拉构件。例如,本文所述的任何医疗器械可以包括在名称为“具有张紧带的医疗工具(medical tools having tension bands)”的国际专利申请no.pct/us2018/064721(于2018年12月10日提交)中示出和描述的类型的张紧带(代替缆线或除了缆线之外),该申请的全部内容通过引用并入本文。
128.尽管已经将各种实施例描述为具有特定特征和/或部件的组合,但是其他实施例可能具有来自上述讨论的任何实施例的任何特征和/或部件的组合。已经在医疗设备的一般背景下描述了各个方面,并且更具体地讲是手术器械,但是创造性方面不一定限于在医疗设备中的使用。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1