医疗臂装置的制作方法
1.本说明书中公开的技术(在下文中,“本公开内容”)涉及医疗领域中例如用于支承医疗器械的医疗臂装置。
背景技术:
2.在腹腔镜手术中,例如在患者的腹部钻出的若干小孔中附接套管针,并且经由套管针将诸如内窥镜和钳子的医疗器械插入腹腔,并且外科医生在观看由内窥镜成像的视频的同时执行手术。由于腹腔镜手术不需要剖腹手术,因此患者的负担小并且术后恢复快,并且大大减少了直到出院的天数。
3.在腹腔镜手术中,内窥镜等的视野的调整影响手术的进展,但是对于每个操作者(内窥镜医师)控制技术不是恒定的。为此,通过引入支承内窥镜的医疗臂装置,实现了诸如内窥镜医师的劳动力成本的成本降低、内窥镜的控制技术的高准确度和安全性的提高。
4.例如,提出了这样的医疗支承臂装置,其包括连接多个连杆并通过致动器被驱动而使包括多个连杆的臂部的姿势改变的多个主动关节单元、检测作用在主动关节单元上的扭矩的扭矩传感器、以及能够改变臂部的形式的至少一个被动形式改变机构(参见专利文献1)。
5.引文列表
6.专利文献
7.专利文献1:日本专利申请公开第2018-75121号
技术实现要素:
8.发明要解决的问题
9.本公开内容的目的是提供用于例如腹腔镜手术并且支承诸如内窥镜的医疗器械的医疗臂装置。
10.问题的解决方案
11.本公开内容涉及一种医疗臂装置,该医疗臂装置包括:
12.第一臂部,其包括支承医疗器械的前端部;以及
13.第二臂部,其支承第一臂部,并且包括至少两个水平旋转轴和改变两个水平旋转轴之间的距离的轴间距离改变单元。医疗器械例如是包括诸如内窥镜的成像单元的医疗观察装置。
14.第二臂部包括第一连杆、在第一连杆的前端处具有绕水平旋转轴的自由度的第一关节部、经由第一关节部水平地附接至第一连杆的前端的第二连杆、以及在第二连杆的前端处具有绕水平旋转轴的自由度的第二关节部。此外,第二连杆包括轴间距离改变单元,并且第一臂部经由第二关节部被支承。
15.前端部包括其中直接连接与三个自由度的旋转轴对应的确定内窥镜的姿势的关节构件的结构。前端部包括其中从最前端部分开始依次设置绕医疗器械的纵向轴的旋转
轴、绕纵向轴的旋转轴为横滚轴的情况下的偏航轴、以及俯仰轴的结构。
16.发明的效果
17.根据本公开内容,可以提供支承诸如内窥镜的医疗器械并且避免与外科医生的干扰的医疗臂装置。
18.注意,本说明书中描述的效果仅是示例,并且由本公开内容带来的效果不限于此。此外,本公开内容还可以提供除了上述效果之外的附加效果。
19.根据基于如稍后所述的实施方式和附图的更详细描述,本公开内容的其他目的、特征和优点将变得明显。
附图说明
20.图1是示出内窥镜手术系统100的配置示例的图。
21.图2是示出摄像装置头部和ccu的功能配置示例的图。
22.图3是示出从斜视内窥镜300的上表面和前表面以及摄像装置200的后表面侧观看的位置关系的图。
23.图4是示出将斜视内窥镜300从患者103的腹壁401插入腹腔并且观察诸如患部的观察目标402的状态的图。
24.图5是示出在改变插入腹腔的斜视内窥镜300的位置和姿势的同时观察观察目标402的状态的图。
25.图6是示出医疗臂装置120和臂控制装置143的功能配置示例的图。
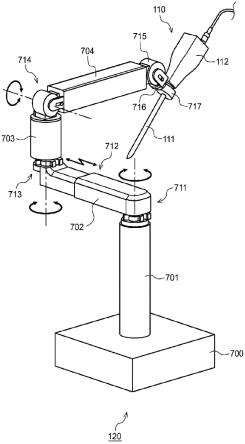
26.图7是示出医疗臂装置120的外观配置示例的图。
27.图8是示出支承内窥镜110的前端部的结构的放大视图。
28.图9是示出医疗臂装置120从外科医生101的前方接近外科医生101的双手之间的手术方法的图。
29.图10是示出医疗臂装置120从外科医生101的前方接近外科医生101的双手之间的手术方法的图。
30.图11是示出医疗臂装置120的自由度配置的图。
31.图12是示出医疗臂装置1200的外观配置示例的图。
32.图13是示出医疗臂装置1200的自由度配置的图。
33.图14是示出医疗臂装置120中的主动轴的布置示例的图。
34.图15是示出医疗臂装置120中的主动轴和被动轴的布置示例的图。
35.图16是示出医疗臂装置1200中的主动轴的布置示例的图。
36.图17是示出医疗臂装置1200中的主动轴和被动轴的布置示例的图。
37.图18是示出医疗臂装置1800的自由度配置示例的图。
38.图19是示出医疗臂装置1900的自由度配置示例的图。
39.图20是示出医疗臂装置2000的自由度配置示例的图。
40.图21是示出医疗臂装置2100的自由度配置示例的图。
41.图22是示出医疗臂装置2200的自由度配置示例的图。
42.图23是示出医疗臂装置2300的自由度配置示例的图。
43.图24是示出包括水平旋转轴2301的轴间距离改变单元的操作示例的图。
44.图25是示出包括水平旋转轴2301的轴间距离改变单元的操作示例的图。
具体实施方式
45.在下文中,将参照附图按以下顺序描述根据本公开内容的技术。
46.a.概述
47.b.内窥镜手术系统的配置
48.c.摄像装置头部和ccu
49.d.关于内窥镜
50.e.医疗臂装置和臂控制装置
51.f.医疗臂装置的配置
52.g.修改示例
53.h.效果
54.a.概述
55.本公开内容实现满足以下三个要求、抑制装置的尺寸的增加、并且实现臂的更高的自由度和更宽的可移动范围的医疗臂装置。
56.(1)能够以六个自由度或更多自由度控制内窥镜的姿势
57.(2)确保手术期间内窥镜的足够操作范围
58.(3)与各种过程对应
59.本公开内容实现包括能够避免对外科医生的干扰的自由度结构的医疗臂装置,以在满足上述三个要求的同时实现手术期间与外科医生的顺利协作工作。
60.通常,在使用支承诸如内窥镜的医疗器械的医疗臂装置的手术中,由于从外科医生的各种方向例如斜前方、侧方或上方接近外科医生的手,因此可能出现外科医生的手或手臂与臂之间的干扰。
61.根据本公开内容的医疗臂装置包括第一臂部和第二臂部,第一臂部包括支承内窥镜的前端部,第二臂部支承前端部,并且第二臂部包括至少两个水平旋转轴和改变两个水平旋转轴之间的距离的轴间距离改变单元。因此,通过根据接近外科医生的手的方向调整第二臂部的两个水平旋转轴之间的距离,可以避免外科医生的手或手臂与臂和臂前端部之间的干扰。在腹腔镜手术中,内窥镜医师站在外科医生旁边操作内窥镜。另一方面,在根据本公开内容的医疗臂装置中,由于第二臂部包括轴间距离改变单元,因此可以从外科医生的相对侧跨过患者(或手术床)接近外科医生手边的自由空间。以这种方式,通过从外科医生的面部接近,可以避免外科医生的手或手臂与臂前端部之间的干扰。
62.此外,根据本公开内容的医疗臂装置具有其中集中地设置具有三个自由度的正交旋转轴的结构,在该正交旋转轴中,前端部确定内窥镜的姿势。这里,三个自由度的正交旋转轴具有其中内窥镜的光轴旋转轴、用于改变内窥镜的观察方向的平移轴、以及倾斜轴从最前端部分开始依次设置的结构。替选地,也可以说,三个自由度的正交旋转轴具有其中绕内窥镜的纵向轴的旋转轴、在绕纵向轴的旋转轴是横滚轴的情况下的偏航轴、以及俯仰轴按此顺序设置的结构。此外,其中集中地设置旋转轴的结构是其中直接连接与三个自由度的旋转轴对应的关节构件的结构,或者是其中对应于绕纵向轴的旋转轴的关节与对应于俯仰轴的关节之间的距离具有当旋转轴绕俯仰轴旋转时不引起干扰的距离的结构。因此,可
以确保手术期间内窥镜的足够操作范围,并且可以应对各种过程。
63.b.内窥镜手术系统的配置
64.图1示意性地示出了可以应用根据本公开内容的医疗臂装置的内窥镜手术系统100的配置示例。图1示出了外科医生(医生)101使用内窥镜手术系统100对手术床102上的患者103执行手术的状态。内窥镜手术系统100包括内窥镜110、支承内窥镜110的医疗臂装置120、除了内窥镜110之外的医疗器械组130、以及安装有用于腹腔镜手术的各种装置的推车140。
65.医疗臂装置120基本上是具有其中多个连杆通过关节轴连接的多连杆结构的铰接臂(在下文中,也简称为“臂”)。尽管医疗臂装置120在前端部处支承内窥镜110,但是如上述部分a所述,医疗臂装置具有能够以六个自由度或更多自由度控制内窥镜110的姿势、确保手术期间内窥镜的足够操作范围、应对各种手动工作、以及避免与外科医生101的干扰的自由度结构,但是细节将在后面进行描述。
66.安装在推车140上的装置的示例包括摄像装置控制单元(ccu)141、光源装置142、臂控制装置143、输入装置144、治疗工具控制装置145、气膜装置146、记录器147、打印机148和显示装置149。然而,安装在推车140上的装置的类型可以根据用于腹腔镜手术的医疗器械的类型而适当地改变。
67.在腹腔镜手术中,不是切割和打开患者103的腹壁,而是经由刺入腹壁的多个套管针151、152、
……
将内窥镜110的透镜镜筒和其他医疗器械131、132、
……
插入患者103的体腔。医疗器械131、132、
……
例如是钳子、气腹管、能量治疗工具、镊子、牵开器等,但是在图1中以简化方式示出。
68.由内窥镜110成像的患者103的体腔中的手术部位的图像显示在显示装置149上。外科医生101在实时观看显示在显示装置149上的手术部位的图像的同时,使用医疗器械131、132、
……
执行诸如患部的切除的治疗。此外,医疗器械131、132、
……
中的一些(例如,钳子、气腹管和能量治疗工具)可以由助手(未示出)而不是外科医生操作。
69.内窥镜110包括在前端处插入患者103的体腔的透镜镜筒111和连接至透镜镜筒111的近端的摄像装置头部112。假设透镜镜筒111是包括刚性透镜镜筒的刚性镜,但是也可以是包括柔性透镜镜筒的柔性镜。在摄像装置头部112中设置有光学系统和成像元件(两者均未示出)。来自诸如手术部位的观察目标的反射光(观察光)通过光学系统在成像元件上成像。成像元件对观察光进行光电转换,生成与观察图像对应的图像信号,并且将图像信号发送至ccu 141。注意,摄像装置头部112具有驱动光学系统以调整放大率和焦距的功能。此外,可以在摄像装置头部112中设置多个成像元件以用于立体观看(3d显示)。在这种情况下,在透镜镜筒111内部设置有用于将观察光引导至多个成像元件的多个中继光学系统。
70.ccu 141包括诸如中央处理单元(cpu)或图形处理单元(gpu)的处理器、其本地存储器等,并且全面地控制内窥镜110和显示装置149的操作。具体地,ccu 141对从摄像装置头部112接收的图像信号执行诸如去马赛克的显影处理以及用于显示图像的各种图像处理,并且将图像信号输出至显示装置141。此外,ccu 141将与放大率和焦距的调整以及成像条件有关的控制信号发送至摄像装置头部112。
71.显示装置149在ccu 141的控制下显示经受由ccu 141进行的图像处理的捕获图像。优选的是根据应用使用具有适当分辨率或屏幕尺寸的显示装置149。例如,在内窥镜110
支持诸如4k(水平像素的数目3840
×
竖直像素的数目2160)或8k(水平像素的数目7680
×
竖直像素的数目4320)的高分辨率成像或者支持3d显示的情况下,优选的是使用能够进行高分辨率或3d显示的显示装置作为显示装置149。通过使用具有55英寸或更大的屏幕尺寸的显示装置作为与4k或8k的高分辨率兼容的显示装置149,可以向诸如外科医生101的观察者给予进一步的沉浸感。
72.光源装置142例如包括诸如氙气灯、发光二极管(led)或激光二极管的光源,并且在对手术部位进行成像时将照明光提供给内窥镜110。
73.臂控制装置143根据诸如位置控制或力控制的预定控制方法来控制医疗臂装置120的驱动。医疗臂装置120具有其中多个连杆通过关节轴连接的多连杆结构,并且关节轴的至少一部分是由致动器驱动的主动轴。臂控制装置143将驱动信号提供给每个关节驱动致动器。臂控制装置143例如包括诸如cpu的处理器及其本地存储器,并且通过处理器执行加载在本地存储器中的预定程序来控制医疗臂装置120的驱动。
74.输入装置144是内窥镜手术系统100的输入接口。用户(例如,外科医生或助手)可以经由输入装置144向内窥镜手术系统100输入各种类型的信息和指令。例如,用户经由输入装置144输入关于手术的各种类型的信息例如用户的身体信息,以及关于手术的信息。此外,用户经由输入装置144输入驱动医疗臂装置120的指令、内窥镜110的成像条件(照射光的类型、放大率、焦距等)的设置、能量治疗工具的驱动指令等。
75.输入装置144的类型不受限制。输入装置144可以是例如鼠标、键盘、触摸板、开关、控制杆(均未示出)、脚踏开关144a等。触摸板例如叠加在显示装置149的屏幕上,并且用户例如能够对显示在屏幕上的内窥镜110的捕获图像执行输入操作。此外,作为输入装置144,可以使用头戴式显示器或各种类型的可穿戴装置来根据用户的视线或姿势输入信息。此外,输入装置144可以包括收集用户的语音的麦克风,并且可以输入来自用户的语音命令。通过对于输入装置144使用能够以非接触方式输入信息的装置,属于清洁区域的用户能够以非接触方式操作属于非清洁区域的装置,并且用户能够在不将他/她的手从他/她拥有的医疗器械131、132、
……
松开的情况下输入信息。
76.治疗工具控制装置145控制用于组织的烧灼和切开、血管的封闭等的能量治疗工具的驱动。出于确保内窥镜110的视野和确保外科医生的工作空间的目的,气膜装置146通过波状管将气体送入患者103的体腔以使体腔膨胀。记录器147例如包括诸如固态驱动器(ssd)或硬盘驱动器(hdd)的大容量记录装置,并且用于记录关于手术的各种类型的信息。打印机148是在纸上打印诸如字符、图像和图形的数据的装置,并且用于打印关于手术的信息。
77.c.摄像装置头部和ccu
78.图2示意性地示出了摄像装置头部112和ccu 141的功能配置示例。摄像装置头部112包括透镜单元201、成像单元202、驱动单元203和摄像装置头部控制单元205。此外,ccu 141包括通信单元211、图像处理单元212和控制单元213。
79.首先,将描述摄像装置头部112的功能配置。透镜单元201是设置在与透镜镜筒111的连接部分处的光学系统。从透镜镜筒111的前端入射的观察光被引导至摄像装置头部112并且进入透镜单元201。透镜单元201通过组合包括变焦透镜和聚焦透镜的多个透镜而配置。调整透镜单元201的光学特性,使得入射光在成像单元202的成像元件的光接收表面上
形成图像。此外,变焦透镜和聚焦透镜能够在光轴上的位置上移动,以调整捕获图像的放大率和焦点。
80.成像单元202例如包括包含诸如互补半导体(cmos)的图像传感器的成像元件,并且被设置在透镜单元201的后续阶段。成像单元202可以紧接在透镜镜筒111内部的物镜之后设置而不是设置在摄像装置头部112内部。成像单元202对通过透镜单元201形成在成像元件的光接收表面上的观察光进行光电转换,生成与观察图像对应的图像信号,并且将图像信号输出至通信单元203。
81.例如,如果使用能够应对4k或更高的高分辨率图像的成像的成像元件获得手术部位的高分辨率图像,则外科医生101可以在显示装置149的屏幕上通过高分辨率图像掌握手术部位的状态,并且可以更顺利地进行手术。此外,成像单元202可以包括一对成像元件以支持3d显示。通过执行3d显示,外科医生101可以更准确地掌握手术部位中的活体组织的深度,并且可以更顺利地进行手术。
82.驱动单元203包括致动器,并且在摄像装置头部控制单元205的控制下使透镜单元201的变焦透镜和聚焦透镜在光轴方向上移动预定距离,以调整由成像单元202捕获的图像的放大率和焦点。
83.通信单元204包括向ccu 141发送和从ccu 141接收各种类型的信息的通信装置,并且主要用于经由传输线缆220将从成像单元202获得的图像信号发送至ccu 141。为了使外科医生101在观察患部的捕获图像的同时更安全且可靠地执行手术,需要实时显示患部的运动图像。因此,为了以低延迟发送从成像单元202获得的图像信号,通信单元204优选地执行光通信。在执行光通信的情况下,通信单元204包括电光转换模块,将电信号转换成光信号,并且经由传输线缆(光纤)220将光信号发送至ccu 141。
84.此外,通信单元204从ccu 141的侧接收用于控制摄像装置头部112的驱动的控制信号,并且将控制信号提供给摄像装置头部控制单元205。控制信号包括关于捕获图像的帧速率的信息、关于成像时的曝光的信息、以及关于捕获图像的放大率和焦点的信息。该控制信号也可以通过光通信来发送。在这种情况下,通信单元204包括光电转换模块,将经由传输线缆220接收的光信号转换成电信号,并且将电信号提供给摄像装置头部控制单元205。注意,由ccu 141的侧的控制单元213自动设置诸如帧速率、曝光值、放大率和焦点的成像条件。即,在内窥镜110中安装有自动曝光(ae)、自动对焦(af)和自动白平衡(awb)的功能。
85.摄像装置头部控制单元205基于经由通信单元204从ccu 141接收的控制信号来控制摄像装置头部112的驱动。例如,摄像装置头部控制单元205基于指定帧速率或曝光值的控制信号来控制成像单元202的成像元件的驱动。此外,摄像装置头部控制单元205基于用于指定捕获图像的放大率和焦点的控制信号,经由驱动单元203调整透镜单元201的变焦透镜和聚焦透镜在光轴方向上的位置。此外,摄像装置头部控制单元205可以具有存储用于识别透镜镜筒111和摄像装置头部112的信息的功能。
86.注意,通过将诸如透镜单元201和成像单元202的摄像装置头部112的一部分设置在具有高保密性和防水性的密封结构中,可以赋予耐高压灭菌的抵抗力。
87.接下来,将描述ccu 141的功能配置。通信单元211包括向摄像装置头部112发送和从摄像装置头部112接收各种类型的信息的通信装置,并且主要用于摄像装置头部112经由传输线缆220接收从成像单元202获得的图像信号。在执行光通信的情况下,通信单元211包
括光电转换模块,将接收的光信号转换成电信号,并且将电信号提供给图像处理单元212。
88.此外,通信单元211将用于控制摄像装置头部112的驱动的信号发送至摄像装置头部112。控制信号包括关于捕获图像的帧速率的信息、关于成像时的曝光的信息、以及关于捕获图像的放大率和焦点的信息(同上)。该控制信号也可以通过光通信来发送。在这种情况下,通信单元211包括电光转换模块,将电信号转换成光信号,并且经由传输线缆220将光信号发送至摄像装置头部112。
89.图像处理单元212对从摄像装置头部112发送的图像信号执行图像处理。图像处理例如包括诸如显影处理、高图像质量处理(频带协调处理、超分辨率处理、降噪(nr)处理、摄像装置抖动校正处理等)和放大处理(电子变焦处理)的信号处理。此外,图像处理单元212对图像信号执行检测处理,以用于执行ae、af和awb。
90.图像处理单元212例如包括诸如cpu、gpu的处理器及其本地存储器等,并且通过处理器执行加载在本地存储器中的预定程序来执行上述图像处理和检测处理。此外,在图像处理单元212包括多个gpu的情况下,可以适当地划分关于图像信号的信息,并且可以由多个gpu并行执行图像处理。
91.控制单元213执行与由内窥镜110进行的手术部位的成像以及捕获图像的显示有关的各种类型的控制。例如,控制单元213生成用于控制摄像装置头部112的驱动的控制信号。在用户经由输入装置144输入成像条件的情况下,控制单元213基于用户输入来生成控制信号。此外,在内窥镜110上安装有ae功能、af功能、awb功能的情况下,控制单元213基于由图像处理单元212进行的检测处理的结果来计算最佳曝光值、焦距和白平衡,并且生成控制信号。
92.此外,控制单元213基于经受由图像处理单元212进行的图像处理的图像信号,来使显示装置149显示由内窥镜110成像的患者的体腔中的手术部位的图像。当在显示装置149上显示手术部位的图像时,控制单元213可以叠加并显示手术支持信息。基于与手术部位的图像一起呈现的手术支持信息,外科医生101能够更安全且可靠地进行手术。
93.连接摄像装置头部112和ccu 141的传输线缆220可以是与电信号通信兼容的电信号线缆、与光通信兼容的光纤或其复合线缆。替选地,摄像装置头部112和ccu 141可以无线地连接而不是有线线缆。在摄像装置头部112和ccu 141通过无线通信连接的情况下,不需要将传输线缆220铺置在手术室中,并且诸如外科医生101和助手的医务人员的移动不会被传输线缆220妨碍。
94.d.关于内窥镜
95.作为示例,假设内窥镜110的透镜镜筒111是刚性镜。刚性内窥镜的类型的示例包括刚性内窥镜的光轴与透镜镜筒的轴向方向一致的前视内窥镜(透镜面向前方),以及刚性镜的光轴相对于透镜镜筒的轴倾斜的斜视内窥镜。
96.图3示意性地示出了从斜视内窥镜300(刚性斜视内窥镜的情况下的透镜镜筒111)的上表面和前表面(目标组织的侧)以及摄像装置200的后表面侧中的每一个观看的位置关系。斜视内窥镜300经由目镜单元301附接至摄像装置头部112的前端。斜视内窥镜300能够独立于摄像装置头部112进行光轴旋转。注意,附接至光导连接器302的光导在斜视内窥镜300内部延伸。由诸如led或激光的光源装置142产生的光由光导引导至斜视内窥镜300的前端,并且经由物镜朝向患者的腹腔中的观察目标射出。
97.医疗臂装置120的前端部具有其中集中地设置用于确定斜视内窥镜300的姿势的三个自由度的正交旋转轴的结构(图3中未示出)。这里,三个自由度的正交旋转轴具有其中从最前端部分开始依次设置绕斜视内窥镜300的光轴c1的旋转轴、左右旋转轴和垂直旋转轴的结构。医疗臂装置120的自由度结构将在后面进行描述。
98.在图3中,与目镜光学系统的光轴c1垂直且其中存在目标组织的平面被定义为手术视野平面340。然后,与摄像装置头部112中的成像元件的成像区域对应的摄像装置视野范围350存在于手术视野平面340上。此外,斜视内窥镜300的物镜光学系统的光轴c3相对于目镜光学系统的光轴c1倾斜预定角度。当医疗臂装置120的最前端部分使斜视内窥镜300绕目镜光学系统的光轴c1旋转时,物镜光学系统的光轴c3也绕目镜光学系统的光轴c1旋转,并且在手术视野平面340上绘制旋转移动轨迹360的同时,摄像装置视野范围350的中心移动。
99.图4示出了将斜视内窥镜300从患者103的腹壁401插入腹腔并且观察诸如患部的观察目标402的状态。套管针点t是套管针151刺入腹壁401的位置,并且对应于斜视内窥镜300插入人体的位置。附图标记402指示斜视内窥镜300(或内窥镜1100)的观察目标,并且附图标记403指示诸如器官的障碍物。此外,c4是连接套管针点t和观察目标402的方向。在图4中示出的示例中,斜视内窥镜300在从c4以纸上顺时针倾斜角度θ1的方向上插入腹腔。
100.斜视内窥镜300的目镜光学系统的光轴c1能够以套管针点t为支点旋转。此外,斜视内窥镜300能够从套管针点t前进和缩回到腹腔中。因此,可以通过组合斜视内窥镜300绕作为支点的套管针点t的旋转以及在前进和缩回方向上的移动来改变斜视内窥镜300的位置和姿势。此外,如上所述,斜视内窥镜300的前端处的物镜光学系统的光轴c3相对于目镜光学系统的光轴c1(斜视内窥镜300的纵向方向)倾斜预定角度可以通过使斜视内窥镜300绕目镜光学系统的光轴c1旋转来改变物镜光学系统的光轴c3的方向(即,内窥镜110的视线方向)。简言之,可以通过组合斜视内窥镜200绕作为支点的套管针点t的旋转、在前进和缩回方向上的移动、以及斜视内窥镜200绕目镜光学系统的光轴c1的旋转来改变内窥镜110的视野范围。
101.在图4中示出的斜视内窥镜300的位置和姿势中,在斜视内窥镜300的前端与观察目标402之间存在障碍物403。由于观察目标402成为障碍物403的阴影,因此不能利用由内窥镜110成像的图像观察观察目标402的整个区域。附图标记404指示在该状态下由内窥镜110捕获的图像。
102.图5示出了通过改变插入腹腔的斜视内窥镜300的位置和姿势来观察观察目标402的状态。使斜视内窥镜300以套管针点t为支点旋转,并且从连接套管针点t和观察目标402的c4方向以纸上逆时针倾斜角度θ2。此外,使斜视内窥镜300绕目镜光学系统的光轴旋转,以适当地调整物镜光学系统的光轴方向。如图5所示,在改变斜视内窥镜300的位置、姿势和视线方向的状态下,从斜视内窥镜300的前端处的物镜与观察目标402之间移除障碍物403。因此,可以利用由内窥镜110成像的图像来观察观察目标402的整个区域而不会被障碍物403阻挡。附图标记501指示在该状态下由内窥镜110捕获的图像。
103.由于医疗臂装置120的前端部具有其中设置有确定斜视内窥镜300的姿势的三个自由度的正交旋转轴的结构,因此可以实现如图4和图5所示斜视内窥镜300绕目镜光学系统的光轴c1的旋转,以及斜视内窥镜以套管针点t为支点的旋转和斜视内窥镜在前进和缩
回方向上的移动。在本公开内容中,如在后面将描述的,由于集中地设置三个自由度的正交旋转轴,因此可以减少被前端部的移动影响的空间,并且可以抑制与外科医生的工作空间的干扰。
104.e.医疗臂装置和臂控制装置
105.图6示意性地示出了医疗臂装置120和臂控制装置143的功能配置示例。
106.医疗臂装置120是包括具有至少六个自由度的多连杆结构的臂,并且在前端部处支承诸如内窥镜110的医疗器械。例如,设置其中集中地设置用于确定内窥镜110的姿势的三个自由度的正交旋转轴的结构。其中集中地设置旋转轴的结构是其中直接连接与三个自由度的旋转轴对应的关节构件的结构,或者是其中对应于绕纵向轴的旋转轴的关节与对应于俯仰轴的关节之间的距离具有当绕俯仰轴旋转时不引起干扰的距离的结构。此外,六个自由度之一是调整臂的第二臂部的两个水平旋转轴之间的距离的轴间距离改变单元。医疗臂装置120的机械配置的细节将在后面进行描述。在图6中示出的功能配置中,假设医疗臂装置120的功能被抽象化,连接连杆的关节被分类成被动关节单元610和主动关节单元620这两种类型,并且轴间距离改变单元由被动滑动机构630配置。
107.被动关节单元610包括测量关节角度的编码器611。此外,主动关节单元620包括旋转地驱动关节的致动器621和测量关节的旋转角度的编码器623。此外,可以设置检测作用于关节的扭矩的扭矩传感器622。此外,被动滑动机构630可以包括测量滑动量即轴间距离的改变量的传感器631。
108.臂控制装置143基于经由输入装置144输入的用户的指令,根据诸如位置控制或力控制的预定控制方法来控制医疗臂装置120的驱动。具体地,臂控制装置143根据预定控制方法计算主动关节单元620的致动器621的控制量,并且提供驱动信号。臂控制装置143包括控制单元631和存储单元632。控制单元631例如包括诸如cpu的处理器及其本地存储器,并且由处理器执行从存储单元632等加载到本地存储器中的预定程序。存储单元632例如是诸如ssd或hdd的大容量存储装置,并且以文件格式存储诸如由控制单元631执行的程序代码以及在程序执行期间使用的机器人模型的数据。
109.控制单元631可以使用学习的神经网络模型生成医疗臂装置120的控制信息,以通过深度学习等预测医疗臂装置120的运动。例如,控制单元631可以基于由ccu 141中的控制单元213使用的用于图像识别的神经网络模型所生成的环境识别信息和器械识别信息来生成医疗臂装置120的目标命令值。
110.注意,由控制单元631使用的用于运动预测的神经网络模型还可以生成由医疗臂装置120在前端处支承的内窥镜110的命令值(诸如帧速率、曝光值、放大率和焦点的成像条件)以及医疗臂装置120的命令值。此外,由ccu 141中的控制单元213使用的用于图像识别的神经网络模型和由臂控制装置143中的控制单元631使用的用于运动预测的神经网络模型可以集成至一个以被配置为端到端(e2e)神经网络模型。
111.臂控制装置143和医疗臂装置120可以是与电信号通信兼容的电信号线缆、与光通信兼容的光纤或其复合线缆。此外,线缆可以被包括在上述传输线缆220中。此外,臂控制装置143和医疗臂装置120可以无线地连接而不是有线线缆。
112.f.医疗臂装置的配置
113.根据本实施方式的医疗臂装置120满足以下三个要求、抑制装置的尺寸的增加、并
且实现实现臂的更高的自由度和更宽的可移动范围的医疗臂装置。
114.(1)能够以六个自由度或更多自由度控制内窥镜的姿势
115.(2)确保手术期间内窥镜的足够操作范围
116.(3)与各种过程对应
117.医疗臂装置120具有能够避免与外科医生的干扰的自由度结构,以在满足上述三个要求之后实现手术期间与外科医生的顺利协作工作。
118.f-1.整体配置
119.图7示出了应用于内窥镜手术系统100的医疗臂装置120的外观配置示例。示出的医疗臂装置120是包括具有7个自由度的多连杆结构的臂,在前端部处支承内窥镜110,并且具有其中集中地设置用于确定内窥镜110的姿势的3个自由度的正交旋转轴的结构。此外,剩余的六个自由度包括两个水平旋转轴的三个自由度和调整这些水平旋转轴之间的距离的轴间距离改变单元。
120.具体地,医疗臂装置120包括:基部700;第一连杆701,其基本上垂直地附接至基部700;第一关节部711,其在第一连杆701的前端处具有绕水平旋转轴(替选地,第一连杆701的纵向轴)的自由度;第二连杆702,其经由第一关节部711在水平方向上附接至第一连杆701的前端,并且包括在纵向方向上扩张和收缩的滑动机构712;第二关节部713,其在第二连杆702的前端处具有绕水平旋转轴(替选地,与第二连杆702的纵向轴正交的轴)的自由度;第三连杆703,其经由第二关节部713基本上垂直地附接至第二连杆702的前端;第三关节部714,其在第三连杆703的前端处具有绕与水平旋转轴正交的垂直旋转轴(替选地,与第三连杆703的纵向轴正交的轴)的自由度;第四连杆704,其经由第三关节部714附接至第三连杆703的前端;以及前端部,其在第四连杆704的前端处支承内窥镜110。
121.这里,第二连杆702通过滑动机构712在纵向方向上扩张和收缩,使得可以改变具有绕水平旋转轴的自由度的第一关节部711与第二关节部712之间的距离。
122.此外,基部700例如具有附接至手术床102的框架的结构(未示出)。当然,基部700可以安装在手术室的地板表面上或者可以安装在天花板上。
123.在第四连杆704的远端处支承内窥镜110的前端部具有其中集中地设置用于确定内窥镜110的姿势的三个自由度的正交旋转轴的结构。因此,医疗臂装置120总共具有七个自由度,并且可以以七个自由度控制内窥镜110的姿势。其中集中地设置前端部的三个自由度的正交旋转轴的结构对应于例如其中三个正交旋转轴连接而不插入连杆的结构,或者对应于其中直接连接与三个旋转轴对应的关节构件的结构,并且更具体地,连接三个关节部的构件不是增加臂长度的连杆,而仅是连接关节部的部件。注意,支承内窥镜110的前端部和具有前端部的第四连杆704被称为第一臂部。此外,包括两个水平旋转轴(第一关节部711和第二关节部713)和轴间距离改变单元(滑动机构712)的连杆部(第一连杆701和第二连杆)被定义为第二臂部。在图7中示出的医疗臂装置120中,第二臂部通过具有绕垂直旋转轴的自由度的第三关节部714连接。
124.图8示出了支承内窥镜110的前端部的放大结构。前端部可以支承除了内窥镜110之外的医疗器械。如图8所示,前端部包括:垂直旋转轴部715,其具有绕第四连杆704的前端的垂直旋转轴(或与第四连杆704的纵向轴正交的轴)的自由度并且使内窥镜110在垂直方向上摆动;左右旋转轴部716,其与垂直旋转轴部715相邻、具有绕与垂直旋转轴正交的左右
旋转轴的自由度并且使内窥镜110在左右方向上摆动;以及光轴旋转轴部717,其具有绕内窥镜110(透镜镜筒111)的光轴的自由度。因此,确定内窥镜110的姿势的三个自由度的正交旋转轴具有其中从最前端部分按此顺序设置内窥镜110的光轴旋转轴、左右旋转轴和垂直旋转轴的结构。注意,左右旋转轴部716可以被称为改变内窥镜110的观察方向的平移轴,并且垂直旋转轴部715可以被称为倾斜轴。替选地,在光轴旋转轴部717是横滚轴的情况下,左右旋转轴部716可以被称为偏航轴,并且垂直旋转轴部715可以被称为俯仰轴。如果与这三个轴对应的关节部的组合体积小于人手腕和手的组合体积,则存在使用医疗臂装置120而不是内窥镜医师的优点。光轴旋转轴部717期望地使在轴向方向上握持内窥镜110的长度最小化,以不减小内窥镜110的有效长度。此外,垂直旋转轴部715与光轴旋转轴部717之间的距离期望地被设置为避免臂的自身干扰的长度。如图8所示,其中集中地设置具有三个自由度的彼此正交的旋转轴的结构是其中直接连接与具有三个自由度的旋转轴对应的关节构件的结构,或者其中对应于绕纵向轴的旋转轴的关节与对应于俯仰轴的关节之间的距离具有绕俯仰轴旋转时不引起干扰的距离的结构。因此,可以减小受前端部的移动影响的空间,并且可以抑制与外科医生的工作空间的干扰。顺便提及,在垂直旋转轴部715被设置为更接近根侧的情况下,假设当操作垂直旋转轴部715时,外科医生的手侧的移动变大。
125.f-2.关于对手术方法的响应
126.如上所述,医疗臂装置120在根侧的第二臂部中包括三自由度结构,该三自由度结构包括各自具有绕水平旋转轴的自由度的第一关节部711和第二关节部713,以及能够改变第一关节部711与第二关节部713之间的距离的滑动机构712。因此,通过利用第二臂部的三个自由度来调整臂接近外科医生101的手的位置和方向,可以响应于各种手术方法(臂的安装位置和端口位置的改变)而避免与外科医生101、助手和其他设备的干扰。图9和图10示出了医疗臂装置120从外科医生101的前方接近外科医生101的双手之间的手术方法。
127.f-3.根部的结构
128.图11示出了图7中示出的医疗臂装置120的自由度配置。如上所述,医疗臂装置120包括:基部700;第一连杆701,其基本上垂直地附接至基部700;第一关节部711,其在第一连杆701的前端处具有绕水平旋转轴的自由度;第二连杆702,其经由第一关节部711附接至第一连杆701的前端并且包括在纵向方向上扩张和收缩的滑动机构712;第二关节部713,其在第二连杆702的前端处具有绕水平旋转轴的自由度;第三连杆703,其经由第二关节部713基本上垂直地附接至第二连杆702的前端;第三关节部714,其在第三连杆703的前端处具有绕与水平旋转轴正交的垂直旋转轴的自由度;第四连杆704,其经由第三关节部714附接至第三连杆703的前端;以及前端部,其在第四连杆704的前端处支承内窥镜110。
129.通过使臂从根侧的第二臂部的第三自由度的前端延伸,即使第四连杆704较短,也可以扩大前端处的内窥镜110的到达范围。即,由于可以缩短第四连杆704的连杆长度,因此可以减小作用于第四连杆704的根处的第三关节部714的负载扭矩。由于可以减小驱动第三关节部714的致动器的输出,因此可以通过致动器的减小大小来实现整个医疗臂装置120的空间节省和重量减轻。
130.f-4.关于前端部的支承机构
131.具有在医疗臂装置120的远端处支撑内窥镜110的前端部的第一臂部具有其中集中地设置确定内窥镜110的姿势的三个自由度的正交旋转轴的结构。如图8所示,前端部包
括:垂直旋转轴部715,其在第四连杆704的前端处具有绕垂直旋转轴的自由度;左右旋转轴部716,其与垂直旋转轴部715相邻并且具有绕与垂直旋转轴正交的左右旋转轴的自由度;以及光轴旋转轴部717,其具有绕内窥镜110(透镜镜筒111)的光轴的自由度。以此方式,可以通过集中地设置确定内窥镜110的姿势的三个自由度的正交旋转轴来实现前端部的减小大小。在对前端部进行减小大小的情况下,如从图9和图10可以看出的那样,可以通过尽可能地抑制对外科医生101手边的工作空间的侵入来避免干扰。即,通过将前端部配置为不经由连杆而与旋转轴连接,可以减小前端部旋转时的前端部的工作空间,并且可以避免干扰。
132.此外,如从图7、图8和图11可以看出的那样,确定内窥镜110的姿势的三个自由度的正交旋转轴具有其中从最前端部分开始按此顺序设置内窥镜110的光轴旋转轴、左右旋转轴和垂直旋转轴的结构。如参照图3至图5所述,用于确定内窥镜110的姿势的三个自由度是必要的。需要将使透镜镜筒111(斜视内窥镜300)的光轴旋转的光轴旋转轴部717设置在最前端部分处。此外,通过将左右旋转轴部716设置在从前端开始的第二轴上,使姿势向左右改变时的前端部的移动最小化,并且可以避免外科医生101的手或手臂与臂的前端部的干扰。
133.f-5.关于根部的关节
134.如图7、图8和图11所示,医疗臂装置120是包括具有至少六个自由度的多连杆结构的臂,并且包括:第一臂部,其具有用于确定内窥镜110的姿势的三个自由度的前端部;根侧的第二臂部中的两个水平旋转轴(第一关节部711和第二关节部713);以及轴间距离改变单元(滑动机构712),其用于改变水平旋转轴之间的距离。滑动机构712可以设置有用于滑动第二连杆702的致动器,并且第二连杆702的长度可以通过用户(例如,外科医生101)的操作来调整。此外,包括第二臂部的第一关节部711、滑动机构712和第二关节部713的三自由度机构中的至少之一可以是不由致动器主动操作的被动机构。例如,设置在第二连杆702中的滑动机构712可以是被动滑动机构。通过使用第二臂部的至少一个自由度作为被动机构,可以减轻整个医疗臂装置120的重量。
135.例如,外科医生101或助手握持第三连杆703并且在水平方向上从根侧拉动第三连杆或将第三连杆推至根侧,使得被动滑动机构712收缩,并且可以改变作为两个水平旋转轴的第一关节部711与第二关节部713之间的距离。外科医生101和助手可以根据医疗臂装置120接近外科医生101的手的方向等使用滑动机构712手动调整第二连杆702的长度,并且可以避免外科医生101的手或手臂与臂的前端部之间的干扰。
136.g.修改示例
137.g-1.根部的修改示例
138.图12示出了根据修改示例的医疗臂装置1200的外观配置示例。此外,图13示出了医疗臂装置1200的自由度配置。图12和图13中示出的医疗臂装置1200的主要特征在于,其包括附接至沿长度方向设置在手术床102的侧部上的床轨1210的附接结构部1201,并且其包括升降机构1203,在该升降机构中,在根侧的第一连杆1202上设置有能够在垂直方向上操作的线性运动轴以调整前端侧上的高度。第一关节部711的前端侧具有与图7和图11中示出的医疗臂装置120相同的配置,并且对应的部件由相同的附图标记表示。
139.通过沿床轨1210移动和固定附接结构部1201,可以根据患者103的患部位置调整医疗臂装置1200的布置位置。此外,医疗臂装置1200在附接结构部1201附接至床轨1210的
位置处固定至手术床102。因此,当在手术期间调整手术床102的倾斜度时,可以保持患者103与医疗臂装置1200之间的相对位置关系。在手术期间,手术床102可以倾斜例如大约30度,但是即使在这样的情况下,也可以使用根据本公开内容的医疗臂装置120。注意,医疗臂装置1200可以从外科医生的相对侧跨过患者(或手术床)进入外科医生手边的自由空间。以这种方式,通过从外科医生的面部接近,可以避免外科医生的手或手臂与臂前端部之间的干扰。
140.此外,可以使用包括第一连杆1202的线性运动轴的升降机构1203来调整前端侧的高度。例如,可以根据患者103的体格、内窥镜110被插入和移除的位置等使用升降机构1203来调整前端侧的高度。
141.第一连杆1202的升降机构1203可以具有无驱动致动器的被动轴配置。第一连杆1202的前端侧的自重作用于被动轴。补偿自重的自重补偿机构可以结合在被动轴中,使得升降机构1203不会由于自重而降低。自重补偿机构可以包括例如液压、空气弹簧、压缩螺旋弹簧、拉伸螺旋弹簧或其两种或更多种的组合。
142.外科医生101或助手可以例如通过握持第二连杆并从根侧向上提升或向下推动第二连杆以使第一连杆1202的升降机构1203上下移动,根据患者103的体格来调整前端处的内窥镜110的高度。此外,由于在升降机构1203中结合有自重补偿机构,因此可以在不将整个重量支承在第一连杆1202的前端侧的情况下,以低负载执行提升和降低第一连杆1202的操作。
143.注意,第一连杆1202的升降机构可以由使用驱动致动器的主动轴配置。在这种情况下,驱动致动器根据用户的操作使第一连杆1202的升降机构1203上下移动,并且可以根据患者103的体格来调整前端处的内窥镜110的高度。
144.g-2.滑动机构的修改示例
145.设置在第二连杆702中的滑动机构712包括被动滑动机构(如上所述)。由于附接有医疗臂装置1200的手术床102处于大致水平方向,因此第二关节部713的前端侧的自重不作用于滑动机构712。然而,当手术床102倾斜等时,存在前端侧相对于第二接合部713的自重作用于滑动机构712而引起诸如第二连杆702的扩张和收缩的急剧操作的可能性。这样的操作可能被发送至插入腹腔的内窥镜110而损伤患部。
146.因此,优选的是在被动滑动机构712中结合诸如油阻尼器的阻尼元件以抑制急剧操作。阻尼元件可以具有例如其中使用弹簧施加压力的结构、其中使用由于结构体之间的接触而产生的摩擦力的结构等。
147.g-3.关于主动关节的布置
148.类似地,在图7和图11中示出的医疗臂装置120中,如上述部分g-2所述,调整均具有水平旋转轴的根侧的第一关节部711与第二关节部713之间的轴间距离的滑动机构712可以是被动滑动机构。
149.医疗臂装置120包括总共六个旋转轴——包括第一关节部711、第二关节部713、第三关节部714、垂直旋转轴部715、水平旋转轴部716和光轴旋转轴部717。到目前为止,还没有描述这些旋转轴是由马达驱动的主动轴还是没有诸如马达的致动器的被动轴。所有的旋转轴均可以是主动轴,但是一些可以是被动轴。
150.图14示出了在将医疗臂装置120的所有旋转轴设置为主动轴的情况下的自由度配
置示例。然而,滑动机构712可以是主动滑动机构或被动滑动机构。在图14中示出的医疗臂装置120中,在除了线性运动轴之外的六个轴上安装有诸如马达的致动器,使得可以以六个自由度主动控制内窥镜110。此外,可以通过手动操作作为线性运动轴的被动滑动机构712来调整内窥镜110进入患者103的腹腔的位置和方向。
151.此外,作为与图14的比较,图15示出了在将一些旋转轴替换为被动轴的情况下医疗臂装置120中的主动轴和被动轴的布置示例。在每个图中,在上述六个旋转轴中的主动轴上写有带圆圈的字母“m”。在图15中示出的示例中,只有作为根的水平旋转轴的第一关节部711是没有带圆圈的字母“m”的被动轴,并且前端侧的所有其他旋转轴均是主动轴。
152.在如图15所示的主动旋转轴的布置示例中,外科医生101和助手可以根据医疗臂装置120接近外科医生101的手的方向等手动调整第一关节部711相对于基部700的旋转位置(替选地,第二连杆702从基部700延伸的方向),以避免外科医生101的手或手臂与臂的前端部之间的干扰。
153.图14和图15中的主动轴和被动轴的布置示例也适用于图12和图13中示出的医疗臂装置1200。图16示出了所有旋转轴为主动轴的医疗臂装置1200的自由度配置示例。此外,图17示出了其中仅第一关节部711为被动轴并且前端侧的其他旋转轴为主动轴的医疗臂装置1200的自由度配置示例。
154.在图16中示出的医疗臂装置1200中,在除了线性运动轴之外的六个轴上安装有诸如马达的致动器,使得可以以六个自由度主动控制内窥镜110。此外,可以通过手动操作作为线性运动轴的被动滑动机构712来调整内窥镜110进入患者103的腹腔的位置和方向。
155.另一方面,在图17中示出的医疗臂装置1200中,外科医生101或助手可以根据医疗臂装置120接近外科医生101的手的方向等手动调整第一关节部711相对于基部700的旋转位置(替选地,第二连杆702从基部700延伸的方向),并且可以避免外科医生101的手或手臂与臂的前端部之间的干扰。
156.g-4.具有六自由度配置的医疗臂装置
157.图7、图8和图11示出了具有七自由度配置的医疗臂装置120,并且图12和图13示出了其中还增加了用于提升功能的线性运动轴的具有八自由度配置的医疗臂装置1200。
158.图18作为另一示例示出了具有6个自由度的医疗臂装置1800的自由度配置示例。与图7中示出的医疗臂装置120相比,医疗臂装置1800与图7中示出的医疗臂装置120的不同之处在于,不包括第三关节部714和第四连杆704,并且第三连杆703具有l形并且在远端侧支承包括内窥镜110的前端部。与图7中示出的医疗臂装置120相同的部件由相同的附图标记表示。
159.在使用医疗臂装置1800执行腹腔镜手术的情况下,优化第三连杆703的l形的每个边的长度,并且使用滑动机构712调整根的水平旋转轴之间的距离,从而应对患者103的体格、姿势和患部位置的改变。
160.此外,由于医疗臂装置1800具有仅五个旋转轴,因此不能通过臂的操作来实现内窥镜110的插入和移除。例如,在患者103的体格较大的情况下,假设医疗臂装置1800的可移动范围不足,并且内窥镜110的插入和移除操作变得困难。因此,需要从臂前端部移除内窥镜110,并且手动执行插入和移除操作。此外,即使除了线性运动轴之外的所有五个轴上安装有诸如马达的致动器,也能够仅以五个自由度主动控制内窥镜110。
161.g-5.关于线性运动轴的布置
162.在图12和图13中示出的医疗臂装置1200中,根侧的第一连杆1202包括可以在垂直方向上操作的线性运动轴,并且实现调整前端侧的高度的升降机构1203。因此,通过操作升降机构1203,内窥镜110的插入和移除操作变得可能。
163.图19示出了具有升降机构的另一医疗臂装置1900的自由度配置示例。与图7中示出的医疗臂装置120相比,医疗臂装置1900与医疗臂装置120的不同之处在于,第三关节部714和第四连杆704经由升降机构1901连接,该升降机构包括能够在垂直方向而不是旋转轴上移动的线性运动轴。与图7中示出的医疗臂装置120相同的部件由相同的附图标记表示。
164.在医疗用臂装置1900中,也可以通过操作升降机构1901来插入和取出内窥镜110。此外,通过向医疗臂装置1900的主体的中间部增加能够在垂直方向上操作的线性运动轴,可以在不增加前端部的尺寸的情况下实现内窥镜110的插入和移除操作。
165.升降机构1901具有没有驱动致动器的被动轴配置。前端侧的自重作用于被动轴。补偿自重的自重补偿机构结合在被动轴中,使得升降机构1901不会由于自重而降低。
166.g-6.具有冗余自由度的医疗臂装置的配置示例
167.如上所述,在具有最小六个自由度的医疗臂装置中,可能存在由于患者的体格等而难以进行内窥镜的插入和移除操作的情况。然而,在具有七个自由度的医疗臂装置中,内窥镜的姿势可以自由地改变,包括内窥镜的插入和移除操作。此外,通过设置八个或更多个冗余自由度,医疗臂装置可以容易地应对患者的体格的个体差异和手术方法的改变。注意,如果致动器也安装在所有冗余轴上,则整个医疗臂装置的重量增加并且成本也增加。因此,冗余关节可以是被动关节以抑制重量和成本。
168.图20示出了具有冗余自由度的医疗臂装置2000的自由度配置示例。医疗臂装置2000具有支承内窥镜110的前端部的三个自由度、包括用于调整根侧的第二臂部中的水平旋转轴之间的距离的两个水平旋转轴和垂直轴的第二臂部的三个自由度、以及第一臂部与第二臂部之间的中间部的两个旋转轴的两个自由度,并且具有总共八个自由度。
169.第一臂部和第二臂部的自由度配置与图11中示出的医疗臂装置120的自由度配置相同,并且相同的部件由相同的附图标记表示,并且这里省去其描述。在医疗臂装置2000中,第四连杆2001经由第三关节部714附接至第三连杆714的前端,第五连杆2003经由第四关节部2002附接至第四连杆2001的前端,并且支承内窥镜110的前端部附接至第五连杆2002的前端。
170.医疗臂装置2000被配置成使得作为根侧的两个自由度的第一关节部711和滑动机构712为被动轴,并且第二关节部713之后的前端侧的所有六个自由度为主动轴。通过将根侧的两个自由度设置为被动轴,可以减轻整个医疗臂装置2000的重量。
171.在手术的初始设置时,根据患者103的体格、手术方法等调整根侧的被动轴的两个自由度。当然,即使在手术期间,也可以根据需要重新调整根侧的被动轴的两个自由度。此后,可以使用前端侧的主动轴的6个自由度主动控制内窥镜110的位置和姿势。
172.图21示出了具有冗余自由度的医疗臂装置2100的另一自由度配置示例。医疗臂装置2100具有支承内窥镜110的前端部的三个自由度、包括两个水平旋转轴的第二臂部的四个自由度、调整水平旋转轴之间距离的垂直轴以及升降机构、以及具有前端部的第一臂部与第二臂部之间的中间部的两个旋转轴的两个自由度,并且具有总共9个自由度。
173.第一臂部和第二臂部的自由度配置与图12和图13中示出的医疗臂装置1200的自由度配置相同,并且相同的部件由相同的附图标记表示,并且这里省去其描述。在医疗臂装置2100中,第四连杆2101经由第三关节部714附接至第三连杆714的前端,第五连杆2103经由第四关节部2002附接至第四连杆2101的前端,并且支承内窥镜110的前端部附接至第五连杆2102的前端。
174.医疗臂装置2100被配置成使得作为根侧的三个自由度的第一关节部711、滑动机构712和升降机构1203为被动轴,并且第二关节部713之后的前端侧的所有六个自由度为主动轴。通过将根侧的三个自由度设置为被动轴,可以减轻整个医疗臂装置2100的重量。
175.在手术的初始设置时,根据患者103的体格、手术方法等调整根侧的被动轴的三个自由度,或者通过沿床轨移动附接结构部1201调整与手术床102的附接位置。当然,在手术期间,也可以根据需要重新调整根侧的被动轴的三个自由度,或者调整与手术床102的安装位置。此后,可以使用前端侧的主动轴的6个自由度主动控制内窥镜110的位置和姿势。
176.图22示出了具有冗余自由度的医疗臂装置2200的又一自由度配置示例。图22中示出的医疗臂装置2200的自由度配置与图21中示出的医疗臂装置2100的自由度配置相同,并且相同的部件由相同的附图标记表示,并且这里省去其描述。在医疗臂装置2200中,在作为被动轴的滑动机构712中结合有阻尼元件,并且在升降机构1203中结合有自重补偿机构。阻尼元件和自重补偿机构的配置方法如上所述。
177.因此,优选的是通过在被动滑动机构712中结合阻尼元件来抑制例如当手术床102倾斜时前端部的急剧操作。此外,通过在升降机构1203中结合自重补偿机构,可以保持当前高度而不会由于自重而降低臂的前端侧。因此,外科医生101和助手可以在不用手支承臂重量的情况下执行腹腔镜手术的操作。
178.图23示出了具有又一自由度配置的医疗臂装置2300的修改示例。然而,与图22中示出的医疗臂装置2200的部件相同的部件由相同的附图标记表示,并且这里省去其说明。医疗臂装置2300的不同之处在于,通过水平旋转轴2301而不是滑动机构712实现改变作为两个水平旋转轴的第一关节部711与第二关节部713之间的距离的轴间距离改变单元。水平旋转轴2301插入连接第一关节部711和第二关节部713的连杆上。连接第一关节部711和水平旋转轴2301的连杆被定义为第二连杆702,并且连接水平旋转轴2301和第二关节部713的连杆被定义为附加连杆702'。
179.图24和图25示出了从上方俯视第一关节部711、第二连杆702、水平旋转轴2301、附加连杆702'和第二连杆713,并且由水平旋转轴2301的旋转改变轴间距离的状态。如图24所示,在第二连杆702和附加连杆702'笔直的水平旋转轴2301的旋转位置中,第一关节部711与第二关节部713之间的轴间距离被最大化。此外,当旋转水平旋转轴2301使得两个连杆702和附加连杆702'弯曲时,第一关节部711与第二关节部713之间的轴间距离缩短。
180.水平旋转轴2301可以由通过致动器旋转的主动轴或者通过用户(外科医生101等)的操作旋转的被动轴构成。在后一情况下,水平旋转轴2301优选地包括阻尼元件并且被配置为当用户的手松开时能够保持水平旋转轴2301的旋转位置,即轴间距离。
181.h.效果
182.将总结本公开内容的效果。
183.(1)根据本公开内容的医疗臂装置具有有着至少六个自由度的多连杆结构,其中,
根侧的第二臂部包括至少两个水平旋转轴以及改变两个水平旋转轴之间的距离的轴间距离改变单元,并且前端部具有其中设置有确定内窥镜的姿势的三个自由度的正交旋转轴的结构(参见图7、图8,以及图11至图13)。因此,医疗臂装置可以以六个或更多个自由度控制内窥镜。支承内窥镜的前端部可以从外科医生的相对侧(内窥镜的投影上的区域)接近外科医生的手,并且可以避免与外科医生的左右手和手臂的干扰。此外,医疗臂装置还可以避免与助手和其他设备的干扰。即使缩短连杆长度,也可以通过调整第二臂部的轴间距离改变单元来扩大由前端部支承的内窥镜的到达范围。此外,通过缩短连杆长度,可以减小驱动关节的致动器的输出,并且可以减轻整个医疗臂装置的重量。
184.(2)根据本公开内容的医疗臂装置具有其中集中地设置具有三个自由度的正交旋转轴的结构,在该正交旋转轴中,前端部确定内窥镜的姿势(参见图7和图8)。因此,医疗臂装置可以实现前端部的减小大小。此外,可以最小化对外科医生手边的工作空间的侵入并且避免与外科医生的干扰。
185.(3)在根据本公开内容的医疗臂装置中,前端部的轴布置具有其中从最前端部分开始依次设置内窥镜的光轴旋转轴、左右旋转轴和垂直旋转轴的结构(参见图7和图8)。因此,可以使姿势向左右改变时臂的移动最小化,并且可以抑制对与外科医生的干扰的影响。
186.(4)在根据本公开内容的医疗臂装置中,根侧的三个自由度中的至少之一由被动轴配置(参见图13,以及图15至图17)。通过将根侧的至少一个自由度设置为被动轴,可以减轻整个医疗臂装置的重量。
187.(5)根据本公开内容的医疗臂装置包括能够调整第二臂部的高度的升降机构(参见图12和图13)。因此,医疗臂装置可以容易地应对静态体格的改变。
188.(6)根据本公开内容的医疗臂装置具有能够附接至手术床的结构(参见图12和图13)。因此,当向床轨的附接位置增加一个自由度并且调整手术床的倾斜度时,可以保持患者与医疗臂装置的相对位置关系。
189.(7)在根据本公开内容的医疗臂装置中,在被动轴中结合有阻尼元件(参见图13)。因此,当手术床倾斜时,可以抑制前端部的急剧操作。
190.(8)在根据本公开内容的医疗臂装置中,在调整臂的高度的升降机构中结合有自重补偿机构(参见图13)。因此,可以在不因自重而降低臂的前端侧的情况下保持当前高度。此外,外科医生或助手可以在不用手支承臂重量的情况下执行腹腔镜手术的操作。
191.工业适用性
192.以上已经参照具体实施方式详细描述了本公开内容。然而,明显的是,本领域技术人员可以在不脱离本公开内容的要旨的情况下对实施方式进行修改和替换。
193.在本说明书中,已经主要描述了本公开内容应用于支承内窥镜的医疗臂装置的实施方式,但是本公开内容的要旨不限于此。本公开内容可以类似地应用于在前端处支承除了内窥镜之外的医疗器械例如钳子、气腹管、能量治疗工具、镊子、牵开器等的医疗臂装置,并且可以通过三个正交自由度确定被支承的医疗器械的姿势。
194.简言之,已经以例示的形式描述了本公开内容,并且本说明书中描述的内容不应当以限制性方式来解释。为了确定本公开内容的要旨,应当考虑权利要求。
195.注意,本公开内容可以具有以下配置。
196.(1)一种医疗臂装置,包括:
197.第一臂部,所述第一臂部包括支承医疗器械的前端部;以及
198.第二臂部,所述第二臂部支承所述第一臂部,并且包括至少两个水平旋转轴和改变所述两个水平旋转轴之间的距离的轴间距离改变单元。
199.(2)根据上述(1)所述的医疗臂装置,
200.所述医疗器械是内窥镜。
201.(3)根据上述(1)或(2)所述的医疗臂装置,其中,
202.所述第二臂部包括基部、大致垂直地附接至所述基部的第一连杆、在所述第一连杆的前端处具有绕水平旋转轴的自由度的第一关节部、经由所述第一关节部水平地附接至所述第一连杆的前端的第二连杆、以及在所述第二连杆的前端处具有绕水平旋转轴的自由度的第二关节部,
203.所述第二连杆包括所述轴间距离改变单元,并且
204.所述第一臂部经由所述第二关节部被支承。
205.(4)根据上述(3)所述的医疗臂装置,其中,
206.所述轴间距离改变单元包括在所述第二连杆的纵向方向上扩张和收缩的滑动机构。
207.(5)根据上述(4)所述的医疗臂装置,其中,
208.所述滑动机构包括阻尼元件。
209.(6)根据上述(3)所述的医疗臂装置,其中,
210.所述轴间距离改变单元是使所述第二连杆弯曲并且具有绕水平旋转轴的自由度的第三关节部。
211.(7)根据上述(1)至(6)中任一项所述的医疗臂装置,其中,
212.所述前端部包括与确定所述医疗器械的姿势的三个自由度的旋转轴对应的关节构件被直接连接的结构。
213.(8)根据上述(7)所述的医疗臂装置,其中,
214.所述前端部包括从最前端部分开始依次设置以下轴的结构:绕所述医疗器械的纵向轴的旋转轴、绕所述纵向轴的所述旋转轴为横滚轴的情况下的偏航轴、以及俯仰轴。
215.(9)根据上述(8)所述的医疗臂装置,其中,
216.所述前端部包括对应于绕所述纵向轴的所述旋转轴的关节与对应于所述俯仰轴的关节之间的距离具有当所述前端部绕所述俯仰轴旋转时不引起干扰的距离的结构。
217.(10)根据上述(7)至(9)中任一项所述的医疗臂装置,其中,
218.所述医疗器械是包括成像单元的医疗观察装置,并且
219.所述前端部包括从最前端部分开始依次设置以下轴的结构:所述医疗观察装置的光轴旋转轴、改变所述医疗观察装置的观察方向的平移轴、以及倾斜轴。
220.(11)根据上述(3)至(10)中任一项所述的医疗臂装置,其中,
221.所述第二臂部包括附接至手术床的附接结构部。
222.(12)根据上述(3)至(10)中任一项所述的医疗臂装置,其中,
223.所述第一连杆包括升降机构。
224.(13)根据上述(12)所述的医疗臂装置,其中,
225.所述升降机构包括自重补偿机构。
226.(14)根据上述(3)至(13)中任一项所述的医疗臂装置,其中,
227.所述第一关节部、所述第二关节部或所述轴间距离改变单元中的至少之一包括被动轴。
228.(15)根据上述(1)至(14)中任一项所述的医疗臂装置,还包括
229.升降机构,所述升降机构被设置在所述第一臂部与所述第二臂部之间。
230.(16)根据上述(15)所述的医疗臂装置,其中,
231.所述升降机构包括自重补偿机构。
232.附图标记列表
233.100 内窥镜手术系统
234.101 外科医生
235.102 手术床
236.103 患者
237.110 内窥镜
238.111 透镜镜筒
239.112 摄像装置头部
240.120 医疗臂装置
241.130 医疗器械组
242.131,132,
…
医疗器械
243.140推车
244.141ccu
245.142 光源装置
246.143 臂控制装置
247.144 输入装置
248.145 治疗工具控制装置
249.146 气膜装置
250.147 记录器
251.148 打印机
252.149 显示装置
253.151,152,
…
套管针
254.201 透镜单元
255.202 成像单元
256.203 驱动单元
257.204 通信单元
258.205 摄像装置头部控制单元
259.211 通信单元
260.212 图像处理单元
261.213 控制单元
262.220 传输线缆
263.300 斜视内窥镜
264.301 目镜单元
265.302 光导连接器
266.610 被动关节单元
267.611 编码器
268.620 主动关节单元
269.621 致动器
270.622 扭矩传感器
271.623 编码器
272.630 被动滑动单元
273.631 传感器
274.700 基部
275.701 第一连杆
276.702 第二连杆
277.703 第三连杆
278.704 第四连杆
279.711 第一关节部
280.712 滑动机构
281.713 第二关节部
282.714 第三关节部
283.715 垂直旋转轴部
284.716 水平旋转轴部
285.717 光轴旋转轴部
286.1200 医疗臂装置
287.1201 附接结构部
288.1202 第一连杆
289.1203 升降机构
290.1210 床轨
291.1800 医疗臂装置
292.1900 医疗臂装置
293.1901 升降机构
294.2000 医疗臂装置
295.2001 第四连杆
296.2002 第四关节部
297.2003 第五连杆
298.2100 医疗臂装置
299.2101 第四连杆
300.2102 第四关节部
301.2103 第五连杆
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1