用于控制氧气浓缩器中的操作的方法和装置与流程
本技术一般涉及用于治疗呼吸障碍的方法和设备,例如涉及控制变压吸附以产生富氧空气的那些。这种方法可以在氧气浓缩器中实现。在一些示例中,该技术更具体地涉及用于控制氧气浓缩器的操作的方法和设备,例如用于改进或维持操作效率。可以实施这种操作控制以抵消氧气浓缩器在使用或长期使用期间可能产生的不平衡。
背景技术:
1、人类呼吸系统及其障碍
2、人体的呼吸系统促进气体交换。鼻和嘴形成患者的气道入口。
3、气道包括一系列分支管,当分支气管穿透更深入肺部时,其变得更窄、更短且更多。肺部的主要功能是气体交换,从而允许氧气从吸入空气进入静脉血并以相反方向排出二氧化碳。气管分成左主支气管和右主支气管,它们最终再分成端部细支气管。支气管构成导气管,不参与气体交换。气道的进一步分支通向呼吸细支气管,并最终通向肺泡。肺部的肺泡区域为发生气体交换的区域,且称为呼吸区。参见2012年由john b.west,lippincottwilliams&wilkins出版的《呼吸系统生理学(respiratory physiology)》,第9版。
4、存在一系列呼吸障碍。呼吸系统疾病的示例包括呼吸衰竭、肥胖过度换气综合征(ohs)、慢性阻塞性肺疾病(copd)、神经肌肉疾病(nmd)和胸壁疾病。
5、呼吸衰竭是呼吸系统疾病的术语,其中肺不能吸入足够的氧气或呼出足够的co2以满足患者的需要。呼吸衰竭可涵盖以下障碍中的一些或全部。
6、患有呼吸功能不全(一种形式的呼吸衰竭)的患者在锻炼时可能经历异常的呼吸短促。
7、肥胖通气过度综合征(ohs)被定义为严重肥胖和清醒时慢性高碳酸血症的组合,不存在通气不足的其他已知原因。症状包括呼吸困难、晨起头痛和过度日间嗜睡。
8、慢性阻塞性肺疾病(copd)涵盖具有某些共同特征的一组下气道疾病中的任何一种。这些疾病包括空气流动阻力增加、呼吸的呼气相位延长,以及肺的正常弹性丧失。copd的示例为肺气肿和慢性支气管炎。copd由慢性吸烟(主要风险因素)、职业暴露、空气污染和遗传因素所引起。症状包括:劳力性呼吸困难、慢性咳嗽和产生痰液。
9、神经肌肉疾病(nmd)是一个广泛的术语,其涵盖直接通过内在肌肉病理学或间接通过神经病理学损害肌肉功能的许多疾病和病痛。一些nmd患者的特征在于进行性肌肉损伤,其导致行走能力丧失、乘坐轮椅、吞咽困难、呼吸肌无力,并最终死于呼吸衰竭。神经肌肉病症可分为快速进行性和缓慢进行性:快速进行性障碍的特点在于在数月内恶化并在数年内导致死亡的肌肉损伤(例如青少年中的肌萎缩性侧索硬化(als)和杜兴氏肌营养不良症(dmd));(ii)可变或缓慢进展性病症:可变或慢进行性障碍:特征在于肌肉损伤历经数年恶化,且仅轻微缩短预期寿命(例如,肢带型、面肩肱型和强直性肌肉营养不良症)。nmd的呼吸衰竭的症状包括:渐增的全身虚弱、吞咽困难、运动中和休息时呼吸困难、疲惫、嗜睡、晨起头痛,以及注意力难以集中和情绪变化。
10、胸壁是一组导致呼吸肌与胸廓之间无效率联接的胸廓畸形。这些障碍通常特征在于限制性缺陷,并且具有长期高碳酸血症性呼吸衰竭的可能。脊柱侧凸和/或脊柱后侧凸可引起严重的呼吸衰竭。呼吸衰竭的症状包括:运动中呼吸困难、外周水肿、端坐呼吸、反复胸部感染、晨起头痛、疲惫、睡眠质量差以及食欲不振。
11、呼吸治疗
12、各种呼吸疗法,例如非侵入式通气(niv)、侵入式通气(iv)和高流率疗法(hft)已经用于治疗上述呼吸障碍中的一种或多种。
13、呼吸压力治疗
14、呼吸压力治疗是以受控的目标压力向气道入口供应空气,该受控的目标压力在整个患者的呼吸循环中相对于大气名义上是正的(与例如罐式通气机或导管式通气机的负压治疗相反)。
15、无创通气(niv)通过上气道向患者提供通气支持以帮助患者呼吸和/或通过完成呼吸功中的一些或全部来维持身体内适当的氧水平。通气支持经由无创患者接口提供。niv已用于治疗csr和呼吸衰竭,其呈诸如ohs、copd、nmd和胸壁障碍的形式。在一些形式中,可以改善这些治疗的舒适性和有效性。
16、无创通气(iv)为不能够自己有效呼吸的患者提供通气支持,并且可以使用气切管提供。在一些形式中,可以改善这些治疗的舒适性和有效性。
17、流疗法
18、并非所有的呼吸疗法都旨在递送规定的治疗压力。一些呼吸疗法旨在通过在目标持续时间内递送吸气流率曲线(可能叠加在正基线压力上)来递送规定的呼吸体积。在其他情况下,到患者气道的接口是“打开的”(未密封的),并且呼吸疗法可仅向患者自身的自主呼吸补充经调节或富集的空气的流。在一个示例中,高流量治疗(hft)是以在整个呼吸循环中大致保持恒定的“治疗流量”通过未密封或打开的患者接口向气道入口提供连续的、加热的、加湿的空气流。该治疗流率被标称地设定为超过该患者的峰值吸气流率。hft已经用于治疗osa、csr、呼吸衰竭、copd和其他呼吸系统疾病。一种作用机制是在气道入口处的空气的高流率通过从患者的解剖学死腔冲洗或洗出呼出的co2来提高通气效率。因此,hft有时被称为死区疗法(deadspace therapy)(dst手术)。其他益处可包括升高的温暖和湿润度(可能在分泌物管理中有益)以及适当升高气道压力的可能性。作为恒定流率的替代,治疗流率可以遵循在呼吸循环中变化的曲线。
19、流疗法的另一种形式是长期氧疗(ltot)或补充氧疗。医生可以规定以指定的氧气浓度(从21%,环境空气中的氧气分数,到100%),以指定的流率(例如,1升每分钟(lpm)、2lpm、3lpm等)将富氧空气的连续流输送至患者的气道。
20、补充氧
21、对于某些患者,通过向加压空气流添加补充氧,氧疗法可以与呼吸压力疗法或hft组合。当在呼吸压力治疗中加入氧时,这被称为具有补充氧的rpt。当向hft中加入氧时,所得疗法称为具有补充氧的hft。
22、呼吸治疗系统
23、这些呼吸疗法可以由呼吸疗法系统或装置提供。此类系统和装置也可以用于筛查、诊断、或监测病症而不治疗它。
24、本文所述的呼吸治疗系统可包括氧源、空气回路和患者接口。
25、氧源
26、本领域的专家已经认识到,对呼吸衰竭患者的锻炼提供了长期的益处,其减缓了疾病的进展,改善了生活质量并延长了患者的寿命。然而,大多数固定形式的锻炼,如跑步机和固定自行车,对于这些患者来说太费力。结果,长期以来认识到对移动性的需要。直到最近,通过使用安装在带有小车轮的推车上的小型压缩氧气罐或气瓶来促进这种移动性。这些罐的缺点是它们含有有限量的氧气并且是重的,在安装时重约50磅。
27、氧气浓缩器已经使用了大约50年,为呼吸治疗提供氧气。氧气浓缩器可以实施诸如真空摆动吸附(vsa)、压力摆动吸附(psa)或真空压力摆动吸附(vpsa)等循环过程。例如,氧气浓缩器(例如poc)可基于摆动吸附过程(例如,真空摆动吸附、变压吸附或真空变压吸附,其中每一种在本文中称为“摆动吸附过程”)中的减压(例如,真空操作)和/或加压(例如,压缩机操作)而工作。压力摆动吸附可涉及使用一个或多个压缩机来增加一个或多个含有气体分离吸附剂颗粒的罐内的气体压力。当包含大量气体分离吸附剂(例如气体分离吸附剂)层时,这种罐可称作筛床。随着压力增加,气体中的某些分子可能被吸附到气体分离吸附剂上。在罐中在加压条件下除去一部分气体允许非吸附分子与吸附分子分离。然后可以通过使罐排气来解吸吸附的分子。关于氧气浓缩器的更多细节可以在例如2009年3月12日公开的题为“氧气浓缩器装置和方法”的美国公开专利申请no.2009-0065007中找到,其通过引用并入本文。
28、环境空气通常包括约78%的氮气和21%的氧气,余量由氩气、二氧化碳、水蒸气和其他痕量气体组成。如果例如空气的气体混合物在压力下供给通过含有气体分离吸附剂的罐,该气体分离吸附剂比氧气更强烈地吸引氮气,则部分或全部氮气将被吸附剂吸附,并且从罐出来的气体将富含氧气。当吸附剂达到其吸附氮气的能力的终点时,吸附的氮气可以通过排气解吸。然后,罐准备好进行另一个生产富氧空气的循环。通过在双罐系统中交替加压罐,一个罐可以分离(或浓缩)氧气,而另一个罐正在排气(导致氧气与空气几乎连续分离)。这种交替导致氧气与氮气近乎连续地分离。以这种方式,例如在储存容器或其他连接到罐的可加压容器或导管中,可以积聚富氧空气,用于各种用途,包括向用户提供补充氧气。
29、真空摆动吸附(vsa)提供了替代的气体分离技术。vsa通常使用真空(例如被配置成在罐内产生真空的压缩机)将气体抽吸通过罐的分离过程。真空变压吸附(vpsa)可理解为使用组合的真空和加压技术的混合系统。例如,vpsa系统可以对用于分离过程的罐加压,并且还施加真空以加压罐。
30、传统的氧气浓缩器体积大且笨重,使得普通的流动活动变得困难和不切实际。近来,制造大型固定式氧气浓缩器的公司开始开发便携式氧气浓缩器(poc)。poc的优点是它们可以产生理论上无限的氧气供应,并且可以为患者(用户)提供移动性。为了使这些装置的移动性小,需要用于生产富氧空气的各种系统被冷凝。poc寻求尽可能有效地利用其产生的氧,以最小化重量、尺寸和功耗。在一些实施方式中,这可以通过以一系列脉冲的形式输送富氧空气来实现,每个脉冲或“推注”定时与吸入开始时间一致。这种治疗模式被称为脉冲氧输送(pod)或需求模式,与更适合于固定氧气浓缩器的传统连续流输送相反。pod模式可以用保存器实现,保存器本质上是具有用于确定吸入开始的传感器的主动阀。
31、空气回路
32、空气回路是导管或管,其被构造和布置成在使用中允许空气流在诸如氧气源和患者接口的呼吸治疗系统的两个部件之间行进。在一些情况下,可具有用于吸气和呼气的空气回路的独立分支。在其他情况下,单个分支空气回路用于吸气和呼气。
33、患者接口
34、患者接口可用于将呼吸设备接合到其佩戴者,例如通过向气道的入口提供空气流。空气流可以经由面罩提供到患者鼻和/或嘴里、经由管提供到嘴里,或经由气切管提供到患者的气管中。根据待施加的治疗,患者接口可与例如患者面部的区域形成密封,从而促使气体以与环境压力有足够差异的压力(例如,相对于环境压力大约10cmh2o的正压)进行输送,以实现治疗。对于其他形式的治疗,例如氧气输送,患者接口可以不包括足以将约10cmh2o的正压的气体输送到向气道的密封。对于诸如鼻hft的流动疗法,患者接口被配置为对鼻孔吹气,但是具体地避免完全密封。这种患者接口的一个示例是鼻插管。
35、系统平衡
36、理想的基于psa的氧气浓缩系统具有对称的或平衡的阻抗,使得存在进入罐、在罐之间和从罐出来的平衡的气体质量流。最佳平衡允许系统的最佳效率,即以最小的功率消耗最佳地回收高纯度氧气。不幸的是,由于部件、材料和组装公差的叠加,完全对称的psa系统难以制造。在操作上,不平衡也可能以系统泄漏以及富氧空气的不规则输出输送的形式随时间发展。如果罐不平衡过大或持续时间过长,一个罐可能会在另一个之前耗尽,导致纯度下降或超压,需要更换吸附剂。因此,存在对可以被配置成抵消psa系统中的罐之间的不平衡的控制方法和设备的需要。
技术实现思路
1、本技术的示例可以提供用于氧气浓缩器(例如便携式氧气浓缩器)的受控操作的方法和设备。
2、特别地,该技术可以提供用于便携式氧气浓缩器的方法和设备,该便携式氧气浓缩机具有控制模式以调节psa循环的一个或多个相的定时,以减少与罐相关联的气动路径之间的一个或者多个气动特性(例如,压力)的不平衡。例如,每个罐中的压力可以根据到压缩机的控制信号的特征参数来估计,该压缩机被控制成以调节的速度(例如,恒定速度)运行。可以评估这种控制信号以减小压力不平衡。通常,控制信号的特征参数可以随着压缩机上的负载而变化,并且其变化的特征参数可以用作每个罐的气动特性的指示。例如,控制信号控制信号的变化,并将其作为一个或另一个罐中压力变化的指示。因此,控制信号特征参数可以在psa循环的每一半的各个点处被采样,以获得罐压力不平衡的测量。不平衡的测量可以通过在与一个罐的半循环相关联的一个或多个样本和与另一个罐的半循环相关联的一个或多个样本之间的比较来导出。不平衡的测量然后可以由控制器应用以设置或调节psa循环相位持续时间,例如通过对每个半循环操作的阀的定时进行改变。例如,不平衡测量可应用于控制模态,例如比例-积分控制器或比例-积分-微分控制器,以减少罐之间的压力不平衡。
3、本技术的一些实现方式可以包括氧气浓缩器。氧气浓缩器可包括配置成产生加压空气流的压缩机。氧气浓缩器可以包括至少两个罐,每个罐包括吸附剂材料,所述吸附剂材料被配置成优先吸附来自所述加压空气流的组分气体,由此从所述加压空气流中产生富氧空气。氧气浓缩器可以包括一个或多个阀,这些阀被配置成用于选择性地将压缩机气动地联接到每个罐,以便选择性地将加压空气流馈送到该罐。一个或多个阀可以被配置成选择性地将每个罐排放到大气。氧气浓缩器可以包括气动地联接以接收产生的富氧空气的蓄积器。氧气浓缩器可包括可操作地联接到一个或多个阀和压缩机的一个或多个控制器。一个或多个控制器可以被配置成在产生所述加压空气流的同时将所述压缩机的速度调节到速度设定点,其中所述调节可以包括产生具有特征参数的压缩机控制信号。一个或多个控制器可以被配置成以循环模式选择性地操作一个或多个阀,例如通过产生一个或多个阀控制信号,以便在蓄积器中产生富氧空气。循环模式的循环可以包括多个相位。多个相位中的每个相位可以包括持续时间。所述一个或多个控制器可以被配置为基于对所述特征参数的评估来生成对所述持续时间中的一个或多个的动态调整。动态调节可以减少罐之间的气动特性的动态不平衡。
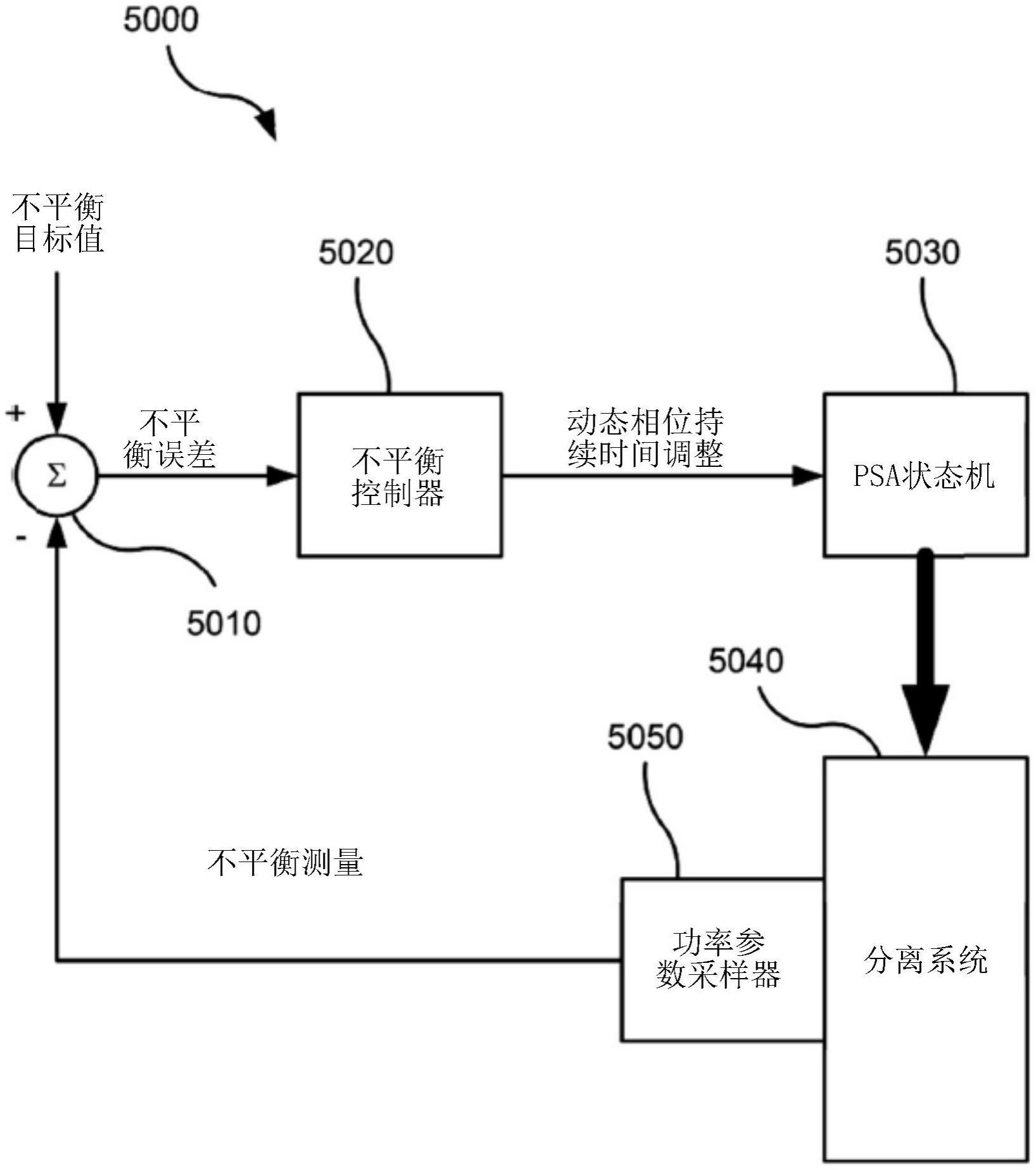
4、在一些实现方式中,一个或多个控制器可以包括不平衡控制系统,不平衡控制系统被配置成产生对一个或多个持续时间的动态调整。不平衡控制系统可以包括采样器。采样器可以被配置成在一个循环内采样或访问特征参数的一个或多个值。采样器可以被配置为基于采样值计算不平衡的测量。不平衡控制系统可以包括不平衡控制器,不平衡控制器被配置成根据不平衡测量来计算至少一个相位持续时间调整。不平衡控制器可以被配置成基于不平衡测量与不平衡目标值之间的比较来计算至少一个相位持续时间调整。比较可以包括不平衡测量和不平衡目标值之间的差。不平衡控制器可以是比例-积分-微分(pid)或比例-积分(pi)控制器。
5、在一些实现方式中,采样器可以被配置为将不平衡测量计算为向量。矢量可以包括以下一个或多个:(a)在连续半循环的各个采样点处的采样值之间的一个或多个差;以及(b)在连续半循环的各个采样点处的采样值之间的一个或多个比。采样点可以与循环的相变一致。采样器还可以被配置为从领先并包括采样点的多个采样值中计算采样点处的每个采样值。
6、在一些实现方式中,该评估可以包括(a)所述特征参数的第一样本值,所述第一样本值与所述至少两个罐中的一个罐的至少一个第一相相关联,以及(b)所述特征参数的第二样本值,所述第二样本值与所述至少两个罐中的另一个罐的至少一个第二相相关联,其中所述至少一个第一相和所述至少一个第二相是对应的相。该比较可以包括第一样本值和第二样本值之间的差。该比较可以包括第一样本值与第二样本值的比。评估进一步可以包括基于比较确定误差。误差可以从目标不平衡值确定。
7、在一些实现方式中,该评估可以包括将该误差输入到一个比例-积分-微分(pid)或比例-积分(pi)控制器,该控制器被配置成用于产生该一个或多个持续时间的动态调整。为了将压缩机的速度调节到速度设定点,一个或多个控制器可配置成基于(a)由速度传感器产生的测量的速度信号与(b)所述速度设定点之间的差来产生所述压缩机控制信号。压缩机控制信号可以是脉宽调制(pwm)波形,并且特征参数可以是pwm波形的占空比。
8、本技术的一些现施方式可以包括操作氧气浓缩装置的方法。该方法可以包括用一个或多个控制器控制压缩机以产生到至少两个罐的加压空气流。每个罐可以包括吸附剂材料,该吸附剂材料被配置成优先地从加压空气流中吸附组分气体,由此从加压空气流中产生富氧气体到被气动地联接以接收所产生的富氧气体的蓄积器。压缩机的控制可以包括将压缩机的速度调节到速度设定点。调节可以包括产生具有特征参数的压缩机控制信号。该方法可以包括利用一个或多个控制器控制一个或多个阀的操作,以选择性地将压缩机气动地联接到每个罐,以便选择性地将加压空气流馈送到该罐。该方法可以包括利用一个或多个控制器控制一个或多个阀的操作,以选择性地将每个罐排放到大气中。一个或多个阀的控制操作可包括以循环模式选择性地操作一个或多个阀以产生富氧空气。循环模式的循环可以包括多个相位。多个相位中的每个相位可以包括持续时间。该方法可以包括利用一个或多个控制器基于对特征参数的评估来控制对一个或多个持续时间的动态调整的生成。动态调节可以减少罐之间的气动特性的动态不平衡。
9、在一些实现方式中,为了生成对一个或多个持续时间的动态调整,一个或多个控制器可以(a)在一个循环内对特征参数的一个或多个值进行采样(例如,访问),(b)基于所采样的值来计算不平衡测量,和/或(c)根据不平衡测量来计算至少一个相位持续时间调整。为了计算至少一个相位持续时间调整,一个或多个控制器可以将不平衡测量与不平衡目标值进行比较。为了比较不平衡测量和不平衡目标值,一个或多个控制器可以计算不平衡测量和不平衡目标值之间的差。一个或多个控制器可以将比例-积分-微分(pid)控制或比例-积分(pi)控制应用于所计算的差。一个或多个控制器可以将不平衡测量计算为向量。矢量可以包括以下一个或多个:(a)在连续半循环的各个采样点处的采样值之间的一个或多个差;以及(b)在连续半循环的各个采样点处的采样值之间的一个或多个比。采样点可以与循环的相变一致。一个或多个控制器可以从领先并包括采样点的多个采样值中计算采样点处的每个采样值。
10、在一些实现方式中,评估可以包括比较(a)特征参数的第一样本值,和(b)特征参数的第二样本值。第一样本值可以与至少两个罐中的一个的至少一个第一相位相关联。第二样本值可以与至少两个罐中的另一个罐的至少一个第二相位相关联。至少一个第一相和至少一个第二相可以是相应的相。比较可以包括计算第一样本值和第二样本值之间的差。比较可以包括计算第一样本值和第二样本值的比。评估还可以包括基于比较确定误差。误差可以包括从目标不平衡值确定的误差。评估可以包括该误差输入到一个比例-积分-微分(pid)或比例-积分(pi)控制器,以产生该一个或多个持续时间的动态调整。
11、在一些实现方式中,将压缩机的速度调节到速度设定点可以包括基于(a)由速度传感器产生的测量速度信号与(b)所述速度设定点之间的差来产生所述压缩机控制信号。压缩机控制信号可以是脉宽调制(pwm)波形,并且特征参数可以是pwm波形的占空比。
12、本技术的一些实现方式可以包括设备。控制压缩机以产生到至少两个罐的加压空气流的装置,每个罐可包括吸附剂材料,所述吸附剂材料被配置成优先吸附来自所述加压空气流的组分气体,由此从所述加压空气流产生富氧气体到被气动联接以接收所产生的富氧气体的蓄积器;所述控制所述压缩机可包括将所述压缩机的速度调节到速度设定点,其中所述调节可包括产生具有特征参数的压缩机控制信号。
13、该设备可包括控制一个或多个阀的操作的装置,以(a)选择性地将所述压缩机气动地联接到每个罐,以便选择性地将所述加压空气流供给到所述罐,以及(b)选择性地将每个罐排放到大气;其中控制所述一个或多个阀的操作可包括以循环模式选择性地操作所述一个或多个阀以产生所述富氧空气,其中所述循环模式的循环可包括多个相位,所述多个相位中的每一个可包括持续时间。该设备可以包括基于对所述特征参数的评估来生成对所述持续时间中的一个或多个的动态调整的装置,由此所述动态调整减少所述罐之间的气动特征的动态不平衡。
14、当然,这些方面的一部分可以形成本技术的子方面。子方面和/或方面中的各个方面可以各种方式进行组合,并且还构成本技术的其他方面或子方面。
15、考虑到以下详细描述、摘要、附图和权利要求书中包含的信息,本技术的其他特征将变得显而易见。
- 还没有人留言评论。精彩留言会获得点赞!