末端执行器元件的布置的制作方法
本发明涉及机器人手术器械中的末端执行器元件的成角度。
背景技术:
1、手术机器人通常被用来执行手术程序,因为当与手动打开或腹腔镜检查操作相比,手术机器人在精确度和无菌性方面有所改进。典型的手术机器人包括底座单元、机器人臂、以及手术器械。机器人臂在其近侧端部处连接至底座单元,并且在其远侧端部处连接至手术器械。手术器械在其远侧端部处包括末端执行器,所述末端执行器用于在端口处穿透患者的身体以到达其参与医疗程序的手术部位。
2、正在不断取得进步来改进要与操作手术机器人组合使用的手术器械的现有构造。在设计这些进步时需要考虑的重要因素包括确保外科医生在命令接口处所需的运动被精确地转换为末端执行器在手术部位处的运动,以及还确保使器械的驱动效率最大化。手术器械的驱动效率可以被限定为由末端执行器输出的由驱动源(比如马达)施加至器械的力的百分比。器械的驱动效率可以被用作其一般性能的指标。
3、期望设计一种手术器械,所述手术器械提供最大精确度以及驱动效率改进。
技术实现思路
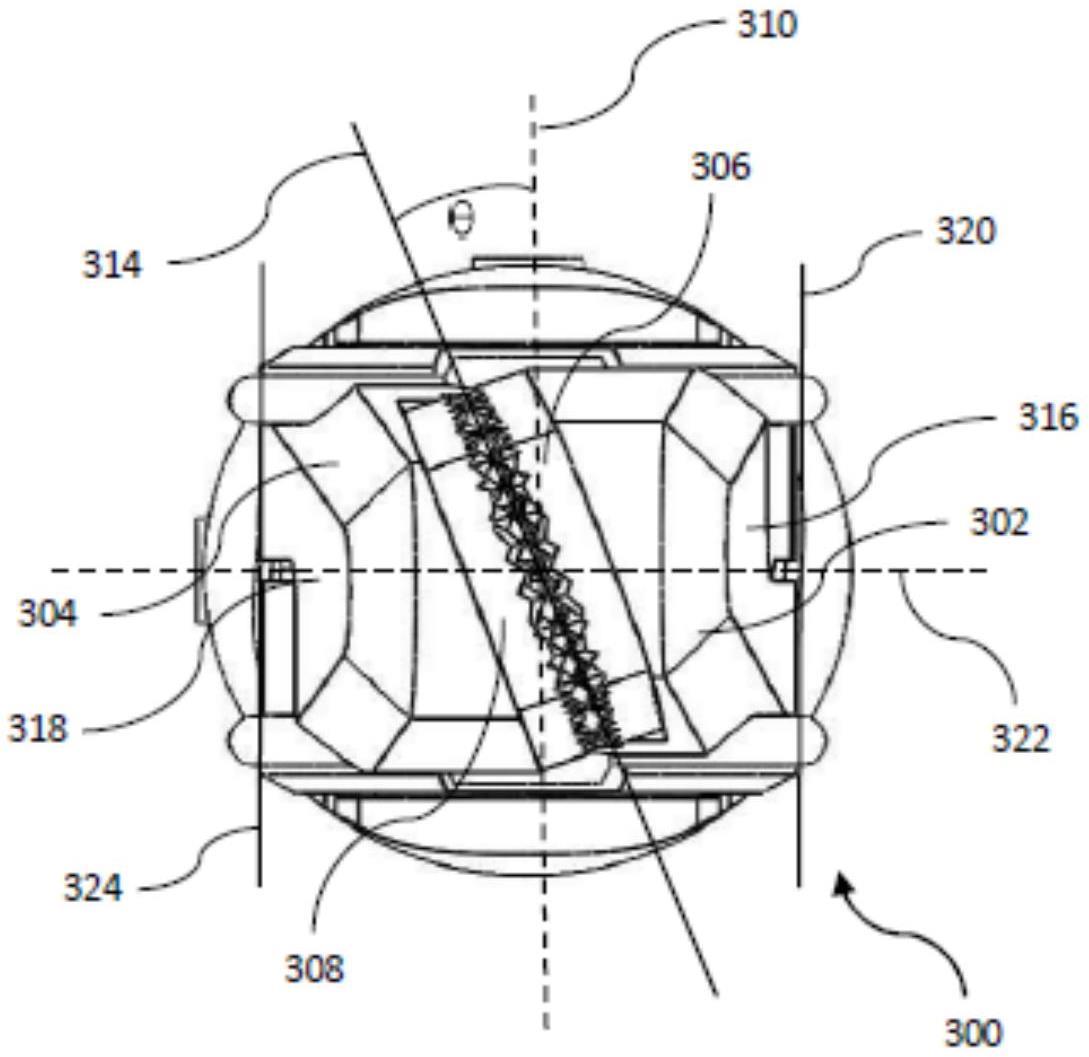
1、根据第一方面,提供一种机器人手术器械,所述机器人手术器械包括:轴;末端执行器,所述末端执行器包括具有第一表面的第一末端执行器元件和具有第二表面的第二末端执行器元件,所述第二表面被构造成与所述第一表面相接;以及将所述末端执行器连接至所述轴的铰接件,所述铰接件允许所述第一末端执行器元件围绕第一轴线旋转并且允许所述第二末端执行器元件围绕第二轴线旋转,所述第一轴线和所述第二轴线横向于所述轴的纵向轴线;其中,当所述末端执行器与所述轴对准且所述第一表面和所述第二表面相接时,所述第一表面相对于所述第一轴线的取向大于零度。
2、当所述末端执行器与所述轴对准并且所述第一表面和所述第二表面相接时,所述第二表面相对于所述第一轴线的取向可以大于零度。
3、所述第一表面相对于所述第一轴线的取向可以在20度至35度之间。
4、当所述末端执行器与所述轴对准时,所述末端执行器的纵向轴线可以与所述轴的所述纵向轴线重合。
5、所述第一末端执行器元件可以进一步包括与所述第一表面相对的第三表面,并且所述第三表面可以平行于所述第一表面。
6、所述第二末端执行器元件可以进一步包括与所述第二表面相对的第四表面,并且所述第四表面可以平行于所述第二表面。
7、所述第一末端执行器元件和所述第二末端执行器元件可以分别围绕所述第一轴线和所述第二轴线独立地旋转。
8、所述铰接件可以包括允许所述第一末端执行器元件围绕所述第一轴线旋转的第一关节以及允许所述第二末端执行器元件围绕所述第二轴线旋转的第二关节。
9、所述第一末端执行器元件可以由第一对驱动元件驱动,并且所述第二末端执行器元件可以由第二对驱动元件驱动。
10、所述第一关节可以包括第一螺纹轴,并且第一执行器元件可以包括被构造成与所述第一螺纹轴相接的螺纹通道。
11、所述第二关节可以包括第二螺纹轴,并且所述第二末端执行器元件可以包括被构造成与所述第二螺纹轴相接的螺纹通道。
12、所述螺纹轴可以具有在0.3mm至2mm之间的节圆直径。
13、所述铰接件可以进一步包括第三关节,所述第三关节允许所述末端执行器围绕横向于所述第一轴线和所述第二轴线的第三轴线旋转。
14、所述轴的远侧端部可以连接至所述铰接件,并且所述轴的近侧端部可以连接至用于驱动所述铰接件的驱动机构。
15、所述铰接件可以进一步包括支撑主体,所述支撑主体通过所述第一关节连接至所述第一末端执行器元件、通过所述第二关节连接至所述第二末端执行器元件、并且通过所述第三关节连接至所述轴。
16、所述第一表面可以包含于第一平面内且所述第二表面可以包含于第二平面内,并且当所述末端执行器与所述轴对准并且所述第一表面和第二表面相接时,所述第一平面和所述第二平面两者相对于所述第一轴线和所述第二轴线的取向都可以大于零度。
17、所述第一轴线可以与所述第二轴线相同。
18、所述第一末端执行器元件和所述第二末端执行器元件可以为末端执行器的相对的第一钳口和第二钳口。
19、所述第一表面和所述第二表面可以为夹持表面。
20、所述机器人手术器械可以被构造成连接至手术机器人。
技术特征:
1.一种机器人手术器械,包括:
2.根据权利要求1所述的机器人手术器械,其中,当所述末端执行器与所述轴对准并且所述第一夹持表面和所述第二夹持表面相接时,所述第二夹持表面相对于所述第一轴线的取向大于零度。
3.根据权利要求1或权利要求2所述的机器人手术器械,其中所述第一夹持表面相对于所述第一轴线的所述取向在20度至35度之间。
4.根据任一前述权利要求所述的机器人手术器械,其中,当所述末端执行器与所述轴对准时,所述末端执行器的纵向轴线与所述轴的所述纵向轴线重合。
5.根据任一前述权利要求所述的机器人手术器械,其中所述第一末端执行器元件进一步包括与所述第一夹持表面相对的第三表面,并且其中所述第三表面平行于所述第一夹持表面。
6.根据任一前述权利要求所述的机器人手术器械,其中所述第二末端执行器元件进一步包括与所述第二夹持表面相对的第四表面,并且其中所述第四表面平行于所述第二夹持表面。
7.根据任一前述权利要求所述的机器人手术器械,其中所述第一末端执行器元件和所述第二末端执行器元件可分别围绕所述第一轴线和所述第二轴线独立地旋转。
8.根据任一前述权利要求所述的机器人手术器械,其中所述铰接件包括允许所述第一末端执行器元件围绕所述第一轴线旋转的第一关节和允许所述第二末端执行器元件围绕所述第二轴线旋转的第二关节。
9.根据任一前述权利要求所述的机器人手术器械,其中所述第一末端执行器元件可由第一对驱动元件驱动并且所述第二末端执行器元件可由第二对驱动元件驱动。
10.根据任一前述权利要求所述的机器人手术器械,其中所述第一关节包括第一螺纹轴,并且第一执行器元件包括被构造成与所述第一螺纹轴相接的螺纹通道。
11.根据任一前述权利要求所述的机器人手术器械,其中所述第二关节包括第二螺纹轴,并且所述第二末端执行器元件包括被构造成与所述第二螺纹轴相接的螺纹通道。
12.根据权利要求10或权利要求11所述的机器人手术器械,其中所述螺纹轴具有在0.3mm至2mm之间的节圆直径。
13.根据任一前述权利要求所述的机器人手术器械,其中所述铰接件进一步包括第三关节,所述第三关节允许所述末端执行器围绕横向于所述第一轴线和所述第二轴线的第三轴线旋转。
14.根据任一前述权利要求所述的机器人手术器械,其中所述轴的远侧端部连接至所述铰接件并且所述轴的近侧端部连接至用于驱动所述铰接件的驱动机构。
15.根据从属于权利要求8时的权利要求13所述的机器人手术器械,其中所述铰接件进一步包括支撑主体,所述支撑主体通过所述第一关节连接至所述第一末端执行器元件、通过所述第二关节连接至所述第二末端执行器元件并且通过所述第三关节连接至所述轴。
16.根据任一前述权利要求所述的机器人手术器械,其中所述第一夹持表面包含于第一平面内并且所述第二夹持表面包含于第二平面内,并且当所述末端执行器与所述轴对准并且所述第一夹持表面和所述第二夹持表面相接时,所述第一平面和所述第二平面两者相对于所述第一轴线和所述第二轴线的取向都大于零度。
17.根据任一前述权利要求所述的机器人手术器械,其中所述第一轴线与所述第二轴线相同。
18.根据任一前述权利要求所述的机器人手术器械,其中所述第一末端执行器元件和所述第二末端执行器元件为末端执行器的相对的第一钳口和第二钳口。
19.根据任一前述权利要求所述的机器人手术器械,其中所述机器人手术器械被构造成连接至手术机器人。
技术总结
一种机器人手术器械,包括:轴;末端执行器,所述末端执行器包括具有第一表面的第一末端执行器元件和具有第二表面的第二末端执行器元件,所述第二表面被构造成与所述第一表面相接;以及将所述末端执行器连接至所述轴的铰接件,所述铰接件允许所述第一末端执行器元件围绕第一轴线旋转并且允许所述第二末端执行器元件围绕第二轴线旋转,所述第一轴线和所述第二轴线横向于所述轴的纵向轴线;其中,当所述末端执行器与所述轴对准并且所述第一表面和所述第二表面相接时,所述第一表面相对于所述第一轴线的取向大于零度。
技术研发人员:本·罗伯特·查普林,大卫·威廉·海登·韦伯斯特·史密斯
受保护的技术使用者:CMR外科有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!