用于外部放射疗法程序的身体组织的可重现对准的设备的制作方法
本设备和方法涉及分次放射疗法的领域。特别地,其涉及这样的设备,其可以相对于电离放射疗法束移动和固定身体组织,使得该组织位置在外部放射疗法程序的每个疗程都被准确地重现。
背景技术:
1、放射疗法是许多患有在骨盆区域周围的各种癌症的患者的标准治疗方法。位于骨盆区域周围的大多数组织结构(膀胱、直肠、子宫颈、子宫、阴道)并未附于骨盆壁上,并且可能从拍摄治疗区域的医学图像以用于治疗规划(治疗模拟)的那一天到递送通过外部放射疗法的首次治疗的那一天(以及任选地形成整个放射疗法程序的持续期的后续天数)发生显著移动。在存在这样的结构的移动的情况下,外部放射疗法不太有效,因为电离辐射不再与肿瘤靶标对准。
2、通常,外部放射疗法是分次进行的,这意指以较频繁的间隔(例如每天)递送较低的辐射剂量,以允许周围组织有时间恢复。分次治疗可持续6-7周,并且骨盆内的器官移动在整个时间段期间是不可预测的。根据我们自身的考察,子宫颈可以在每个方向上移动多达2.2cm,这需要在原始治疗区(即子宫颈癌)周围引入大的体积裕度,从而增加治疗体积,这导致更高的急性和晚期副作用发生率。模拟和治疗之间或者分次治疗之间的子宫颈的运动可能是由膀胱和直肠的充盈或排空并且部分地由于呼吸运动和排便引起的。因此,患者被要求在每个分次治疗之前排空他们的直肠并充盈他们的膀胱。这允许减少子宫移位,但不会以可再现方式防止它们。事实上,在整个治疗持续时间(例如28-30个分次)期间,患者通常无法将膀胱保持充盈在相同的程度,因为在放射疗法接近结束时,膀胱的炎症会阻止完全充盈。此外,排空直肠使前直肠壁和后直肠壁两者在子宫颈周围的具有16-20mm的治疗裕度的高剂量等剂量体积内聚集在一起,这造成整个直肠包含在高等剂量体积内。
3、几年来,使用适形放射疗法(多叶准直器、360°放射疗法、射波刀、螺旋断层放射疗法(tomotherapy))的治疗技术允许局部递送非常高的剂量,同时非常准确地保护位于肿瘤周围的健康器官。如果将要照射的目标的移动减少到最低限度,则这些技术将提供最大的益处。尽管如此,它们并没有克服组织结构从模拟到治疗和/或在分次疗程之间的移动的问题。
4、因此,对于创建允许在骨盆区域中可重复固定组织结构以获益于高治疗精度的系统存在需要。
技术实现思路
1、本文提供了一种用于在包括两个或更多个外部放射疗法疗程的外部放射疗法方案中辅助受试者治疗的定位工具(200),所述定位工具(200)包括:
2、-具有近端(40)和远端(20)的操纵引导装置(300),其包括:
3、-设置在所述远端(20)处的刚性操作机构轴杆(310),其被配置为插入到所述受试者(50)的管(602)中或者附接至插入装置(204),所述捅入装置(204)被配置为插入到所述受试者(50)的管(602)中,和
4、-与所述操作机构轴杆(310)固定关联地设置在所述近端(40)处的刚性把手部(316),用于控制所述操作机构轴杆(310)的位置和/或方向,其中
5、-所述定位工具(200)被配置为移动和/或固定所述管(602)和身体组织(610)以用于所述外部放射疗法疗程:
6、-所述把手部(316)设置有抓握定位装置(300),所述抓握定位装置(300)被配置为与机器人臂(400)的抓握装置(432)位置可重复地协作,其中所述抓握装置(432)具有打开状态和闭合状态;
7、其中所述抓握定位装置(300)被配置为在所述闭合状态下就座于所述抓握装置(432)内,其中就座的所述抓握定位装置(300)相对于所述抓握装置(432)的移动被限制和防止。
8、所述抓握定位装置(300)可以包括一对臂,其中在所述打开状态下所述臂比在所述闭合状态下分开得更远。
9、所述抓握定位装置(300)可以包括一个或多个移动限制装置,其被配置为与闭合的所述抓握装置(432)的一个或多个互补的移动限制装置协作,由此限制和防止就座的所述抓握定位装置(300)相对于所述抓握装置(432)的移动。
10、所述抓握定位装置(300)可以包括一个或多个止动构件,其被配置为与闭合的所述抓握装置(432)的一个或多个互补的止动构件配合。
11、所述抓握定位装置(300)可以包括一个或多个凹口(334)和/或一个或多个突起和/或一个或多个拐角(332),其被配置为与闭合的所述抓握装置的一个或多个互补的结构配合。
12、所述抓握定位装置(300)可以包括一个或多个凹口(334),每一个凹口具有一个方向,任选地其中所述凹口的边缘是倾斜的。所述抓握定位装置(300)可以包括沿着所述把手部(316)的近端的轴向方向设置的一个或多个拐角(332)。所述抓握定位装置(300)可以包括至少一个凹口(334)和至少一个拐角(332),其中所述至少一个凹口(334)和至少一个拐角(332)具有不同的相互方向,优选垂直的方向。至少一个凹口可以设置在所述拐角的纵向跨度内。
13、还提供了一种系统,所述系统包括:
14、-如本文所述的定位工具(200),和
15、-机器人臂(400),其中所述抓握装置(432)在所述闭合状态下被配置作为转动和/或移动限制装置,限制和防止就座在所述抓握装置(432)内的所述抓握定位装置(300)相对于所述抓握装置(432)的转动和/或移动。
16、还提供了一种用于在包括两个或更多个外部放射疗法疗程的外部放射疗法方案中辅助受试者治疗的定位工具(200),所述定位工具(200)包括:
17、-具有近端(40)和远端(20)的操纵引导装置(300),其包括:
18、-在所述远端(20)处的刚性操作机构轴杆(310),其被配置为插入到所述受试者(50)的管(602)中或者附接至插入装置(204),所述插入装置(204)被配置为插入到所述受试者(50)的管(602)中,和
19、-与所述操作机构轴杆(310)固定关联地设置在所述近端(40)处的刚性把手部(316),用于控制所述操作机构轴杆(310)的位置和/或方向,并且被配置为偶连至机器人臂(400)的末端操作机构配件(430),
20、其中
21、-所述定位工具(200)被配置为移动和/或固定所述管(602)和身体组织(610)以用于所述外部放射疗法疗程,并且
22、-所述把手部(316)设置有对接信标(340),其被配置为提供关于所述操纵引导装置(300)相对于机器人臂(400)的末端操作机构配件(430)的关于位置和任选取向的信息。
23、所述对接信标可以包括无源对接信标,所述无源对接信标包括具有通过所述机器人臂的视觉引导系统可识别的预定义几何形状的主体。所述对接信标可以包括多个球体。
24、所述对接信标可以包括有源对接信标,所述有源对接信标被配置为无线地发射允许确定所述把手部(316)的位置和/或取向的信息。所述对接信标可以包括固态陀螺仪。
25、还提供了一种系统,所述系统包括:
26、-如本文所述的定位工具(200),
27、-设置有所述末端操作机构配件(430)的机器人臂(400),和
28、-包括至少一个处理器和存储器的处理单元(440),其中所述处理单元(440)被配置为控制所述机器人臂(400)的移动,
29、其中
30、-所述处理单元(440)被配置为使用所述信息在所述末端操作机构(430)接近所述把手部时实时地调节所述末端操作机构(430)的姿态,并且在没有改变已经插入在所述受试者的管中的操纵引导装置(300)的姿态的情况下将所述末端操作机构配件(430)偶连至所述把手部(316)。
31、所述把手部(316)可以设置有如本文所述的抓握定位装置(300),并且所述末端操作机构配件(430)可以是如本文所述的抓握装置(432)。
32、还提供了一种用于在包括两个或更多个外部放射疗法疗程的外部放射疗法方案中辅助受试者治疗的定位工具(200),所述定位工具(200)包括:
33、-具有近端(40)和远端(20)的操纵引导装置(300),其包括:
34、-设置在远端(20)处的刚性操作机构轴杆(310),其被配置为:
35、-通过入口插入到与所述受试者的身体组织(610)相连的管(602)中,或
36、-可重复地可拆除插入到具有近端(40)和远端(20)的插入装置(204)的细长构件(210)细长构件内腔(214)中,所述细长构件(210)被配置为通过入口插入到与所述受试者的身体组织(610)相连的管(602)中,
37、和
38、-与所述操作机构轴杆(310)固定关联地设置在近端(40)处的刚性把手部(316),用于控制所述操作机构轴杆(310)的位置和/或方向,
39、其中
40、-所述定位工具(200)被配置为移动和/或固定所述管(602)和所述身体组织(610)以用于所述外部放射疗法疗程,并且
41、-所述操纵引导装置(300)设置有图像捕获系统(360),所述图像捕获系统(360)被配置为从所述操作机构轴杆(310)的远端尖端(361)捕获图像,从而允许在所捕获的图像的引导下将所述操作机构轴杆(310)插入到所述管(602)的入口中或者插入所述细长构件内腔(214)中。
42、所述操作机构轴杆(310)的远端尖端(361)可以设置有图像进口端口(364),反射的光通过所述图像进口端口(364)进入。所述操作机构轴杆(310)的远端尖端(361)可以设置有一个或多个光出口端口(362),由光源发射的光通过所述光出口端口(362)退出。所述定位工具(200)还可以包括插入装置(204)。
43、还提供了一种系统,包括:
44、-如本文所述的定位工具(200),其中所述定位工具(200)的把手部(316)设置有如本文所述的抓握定位装置(300),和
45、-设置有末端操作机构配件(430)的如本文所述的机器人臂(400),和
46、所述把手部(316)可以设置有如本文所述的对接信标(340)。
47、本文提供了一种用于在包括一个或多个外部放射疗法疗程的外部放射疗法方案中辅助受试者治疗的定位工具(200),包括:
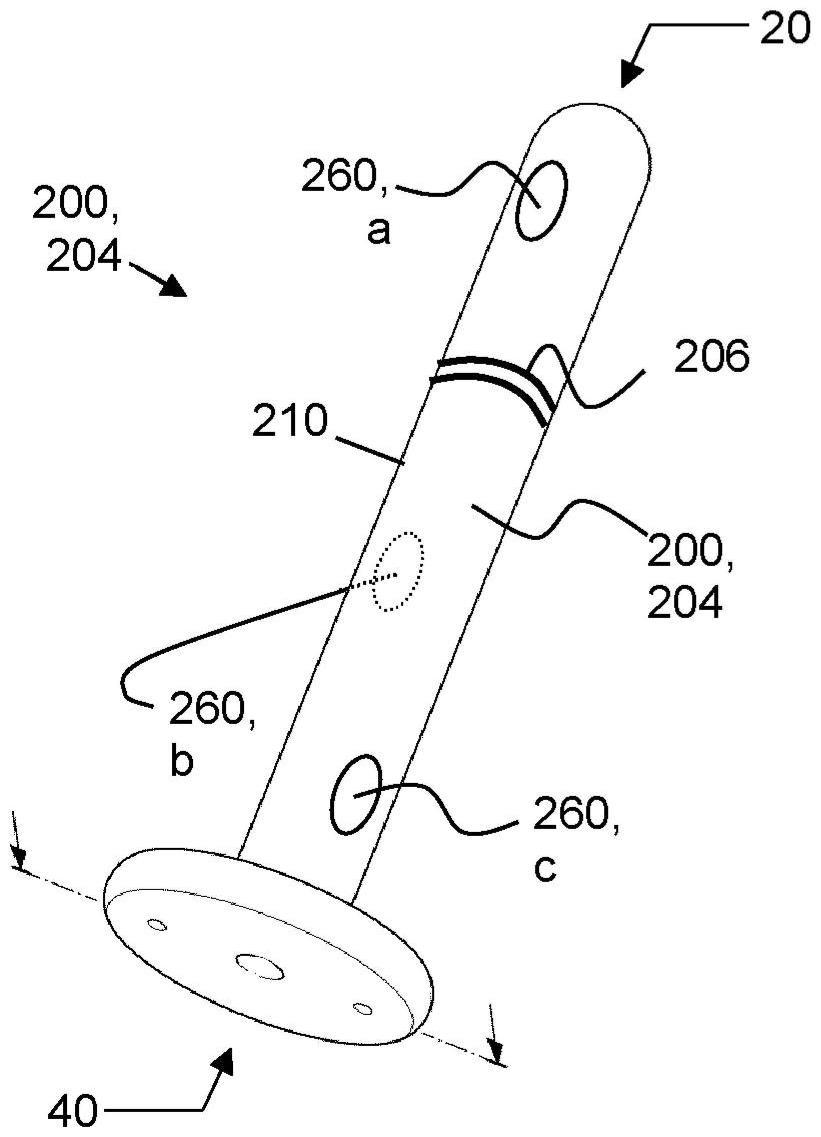
48、-具有近端(40)和远端(20)的插入装置(204),该插入装置包括:
49、-细长构件(210),其被配置为通过与受试者的身体组织(610)相连的管(602)的入口插入并进入其中;
50、以及
51、-具有近端(40)和远端(20)的操纵引导装置(300),该操纵引导装置(300)包括:
52、-在远端(20)处的操作机构轴杆(310),其附接至或可附接至细长构件(210),和
53、-与操作机构轴杆(310)成固定关联地设置在近端(40)处的把手部(316),用于控制操作机构轴杆(310)的位置和/或方向,
54、其中定位工具(200)被配置为相对于电离放射疗法束移动和/或固定受试者的管(602)和身体组织(610)以用于外部放射疗法疗程。
55、细长构件(210)可以设置有细长构件内腔(214),其被配置为接收操纵引导装置(300)的操作机构轴杆(310);并且
56、-操作机构轴杆(310)可以被配置为可重复地可移除插入到细长构件内腔(214)中。
57、操纵引导装置(300)还可以包括将把手部(316)联结至操作机构轴杆(310)的传动装置(314)。
58、操纵引导装置(300)还可以包括朝向传动装置(314)的远端(20)设置的可膨胀传动装置气囊(322),其任选地具有固定的最大膨胀直径。
59、操作机构轴杆(310)的至少一部分和/或由其所带的一个或多个成像标记可以通过医学成像、特别是通过x射线医学成像和/或磁共振mr医学成像是可见的,
60、和/或
61、-传动装置(314)的至少远端部分和/或由其所带的一个或多个成像标记可以通过医学成像、特别是通过x射线医学成像或mr医学成像是可见的,
62、和/或
63、-传动装置(314)和/或操作机构轴杆(310)可以设置有一个或多个无线电应答机,以用于通过空间应答机检测器实时地确定传动装置(314)和/或操作机构轴杆(310)的位置和/或取向。
64、插入装置(204)的至少一部分或由其所带的一个或多个成像标记可以通过医学成像、特别是通过x射线医学成像和/或通过mr医学成像是可见的,
65、和/或
66、-细长构件(210)的至少一部分或由其所带的一个或多个成像标记可以通过医学成像、特别是通过x射线医学成像和/或通过mr医学成像是可见的,和/或
67、-插入装置(204)和/或细长构件(210)可以设置有一个或多个无线电应答机,其用于通过空间应答机检测器实时地确定插入装置(204)和/或细长构件(210)的位置和/或取向,或
68、-细长构件(210)通过x射线成像是不可见的,
69、和/或
70、-操作机构轴杆(310)的至少一部分和/或由其所带的一个或多个成像标记可以通过医学成像、特别是通过x射线医学成像和/或磁共振、mr医学成像是可见的;
71、和/或
72、-传动装置(314)的至少远端部分和/或由其所带的一个或多个成像标记可以通过医学成像、特别是通过x射线医学成像或mr医学成像是可见的;
73、和/或
74、-传动装置(314)和/或操作机构轴杆(310)可以设置有一个或多个无线电应答机,以用于通过空间应答机检测器实时地确定传动装置(314)和/或操作机构轴杆(310)的位置和/或取向。
75、把手部(316)可以被配置为附接至定位设备,该定位设备被配置为调节和/或固定操作机构轴杆(310)的位置和/或取向。
76、把手部(316)可以设置有被配置为与定位设备的末端操作机构配件配合的抓握定位装置(330),该抓握定位装置被配置为将把手部(316)可拆卸、可重复和可再现地附接至定位设备。
77、操纵引导装置(300)的把手部(316)可以设置有对接信标(340),该对接信标被配置为提供关于操纵引导装置(300)的位置和任选的取向方向的实时信息,以允许利用把手部(316)手动、半自动或自动地对接引导所述定位设备。
78、操纵引导装置(300)可以设置有图像捕获系统(360),其被配置为从操作机构轴杆(310)的远端尖端(361)捕获图像,从而允许在所捕获的图像的引导下将操作机构轴杆(310)插入到插入装置(204)的细长构件内腔(214)中。
79、细长构件(210)可以是柔性的并且通过插入到操作机构轴杆(310)的细长构件内腔(214)中而变硬。
80、细长构件(210)可以设置有至少一个滑动限制装置(220),其被配置为减少或防止细长构件(210)相对于管的滑动,
81、任选地其中至少一个滑动限制装置(220)是可膨胀球囊组件(230),其包括一个或多个可膨胀球囊(231,-a至-i)、或可扩大支架(240)、远端突起(245)或止动构件(250),
82、任选地其中至少两个滑动限制装置(220),第一滑动限制装置包括设置在细长构件(210)的近端(40)处的止动构件(250)并且被配置为与管的入口邻接,并且第二滑动限制装置包括可膨胀球囊组件(230)、远端突起(245)或设置在细长构件(210)的远端(20)处的可扩大支架(240),
83、任选地其中至少一个滑动限制装置(220)是设置在细长构件(210)的近端(40)处的止动构件(250)并且被配置为与管的入口邻接,
84、任选地其中止动构件(250)设置有一个或多个缝合通路(252),以用于缝合管的入口,
85、任选地其中可膨胀球囊组件(230)包括一个或多个可膨胀球囊(231,-a至-i),每个具有可膨胀球囊内腔(232),其与经由膨胀管(236)在近端(40)方向上延伸的膨胀内腔(234)流体连接。
86、插入装置(204)可以:
87、要么
88、-还包括用于将操作机构轴杆(310)从管的入口外部引导到内腔(214)中的引导线(218),其中该引导线(218)至少部分地设置在内腔(214)内,并且被限制在引导线(218)的远端(20)处或朝向引导线(218)的远端(20)以限制或防止引导线(218)在近端方向上相对于内腔(214)滑动,并且
89、-任选地其中操作机构轴杆(310)包括设置有用于沿着引导线(218)可滑动移动的引导线通道(312)的主体,该引导线通道(312)至少部分地沿着主体的长度设置,和/或
90、-任选地其中引导线通道(312)是刚性操作机构轴杆(310)中的凹槽或内腔,和/或
91、-任选地其中引导线(218)是绳索或膨胀管(236)
92、-任选地其中引导线(218)相对于内腔(214)不可拆卸或可拆卸地附接,
93、要么
94、-还包括具有套筒内腔(239)的引导套筒(238),以用于将操作机构轴杆(310)从管的入口外部引导到细长构件内腔(214)中,其中引导线(218)的远端(20)以固定关系附接至细长构件内腔(214),并且引导套筒内腔被配置为接收操纵引导装置的操作机构轴杆(310)并将所述操纵引导装置的操作机构轴杆(310)引导到细长构件内腔(214)中,并且
95、-任选地其中操作机构轴杆(310)包括用于可滑动地移动到引导套筒内腔中的主体。
96、管可以是受试者的子宫颈、子宫、阴道穹窿、阴道、阴道复发。
97、管(602)通过定位工具(200)的移动可以:
98、-在外部放射疗法疗程期间将与管(602)相连的身体组织(608)带入到由电离辐射治疗头(518)发射的电离辐射束中,
99、或者
100、-在外部放射疗法疗程期间移动与管(602)相连的身体组织(608)远离由电离辐射治疗头(518)发射的电离辐射束。
101、还提供了一种系统,该系统包括:
102、-如本文所述的定位工具,
103、-被配置为调节和固定操作机构轴杆(310)的位置和/或取向的定位设备。
104、定位设备可以包括末端操作机构配件,其被配置为准确且可再现地可拆卸附接至把手部(316)。定位对比可以是机器人臂,其中末端操作机构配件具有至少3个运动自由度。
- 还没有人留言评论。精彩留言会获得点赞!