用户接口和主控制器之间的交互的制作方法
背景技术:
1、微创医疗技术旨在减小在诊断或外科手术程序期间被破坏的组织的量,从而减小患者的恢复时间、不适感和有害的副作用。使用机器人技术的远程操作外科手术系统(所谓的外科手术机器人系统)可以用于克服人工腹腔镜和开放式外科手术的限制。远程呈现系统的进步为外科医生提供了患者身体内部的视野,增加的外科手术器械的运动度的数量,以及远距离的外科手术协作的能力。对外科手术机器人技术的远程操作控制通常涉及用户与手控制的操纵器的交互以控制外科手术器械的运动,并涉及用户与手指控制的选择器的交互以触发机器人系统事件的发生。触觉反馈可以改善用户对外科手术机器人技术的远程操作控制。
技术实现思路
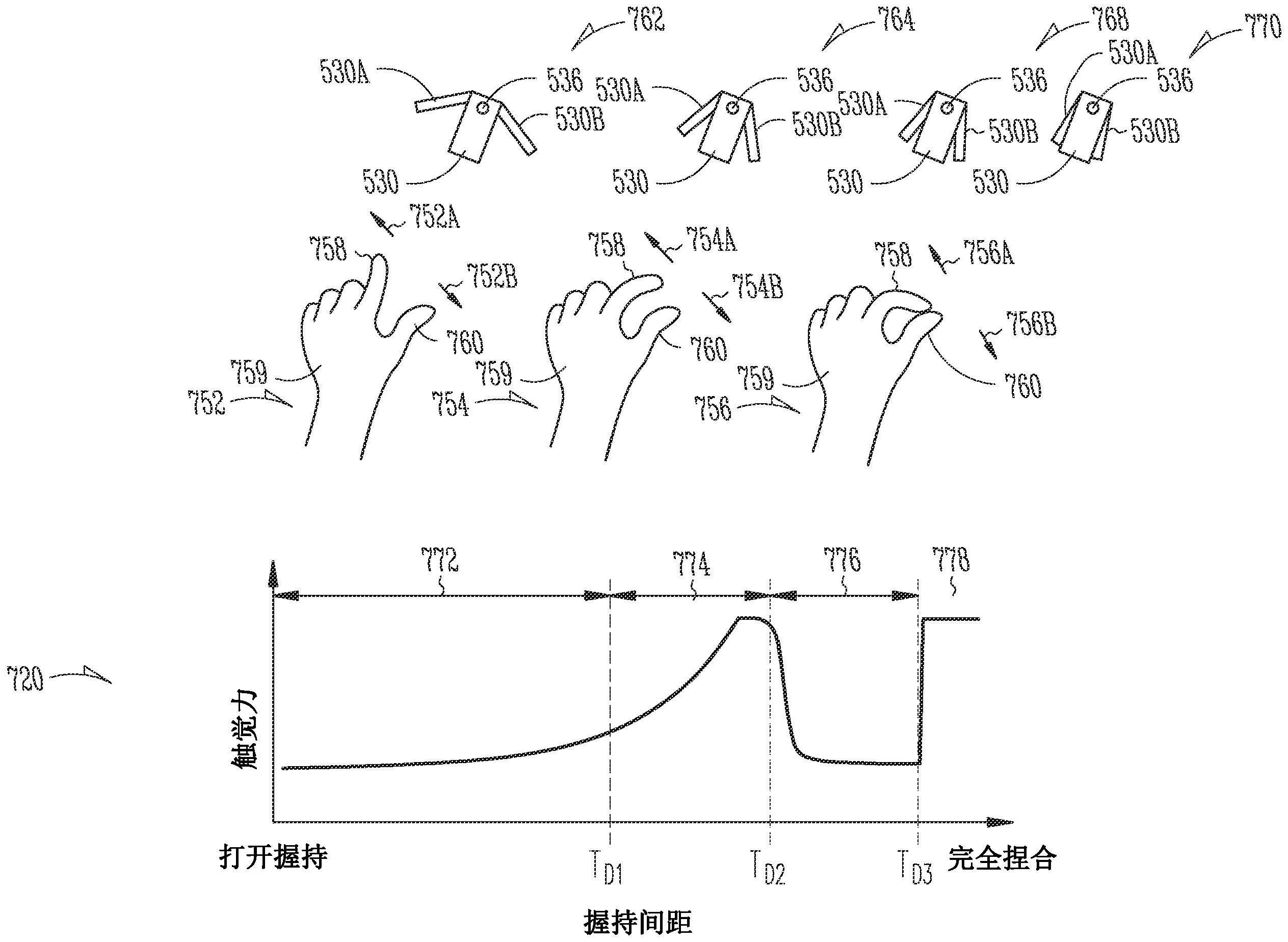
1、在一个方面,提供了一种控制由可移动地安装到安装结构的手致动选择器对点击事件的致动的方法。传感器感测手致动选择器从中性位置的位移距离的量。当手致动传感器处于小于距中性位置第一阈值距离的位移距离处时,根据第一控制状态控制一个或多个马达以施加维持力。当手致动传感器处于距中性位置第一阈值距离和距所述中性位置第二阈值距离之间的位移距离处时,根据第二控制状态控制马达向手致动选择器施加随着手致动选择器从中性位移位置的位移增加而增加的触觉力。一旦手致动传感器满足距中性位置第二阈值距离,就施加点击事件信号,以致使在显示系统处发生点击事件。另外,一旦手致动传感器满足距中性位置第二阈值距离,就根据第三控制状态控制一个或多个马达以将施加到手致动选择器的触觉力的量级减小到小于第二控制状态期间施加的触觉力的最大量级的减小的量级。
2、在另一个方面,提供了一种基于用户输入设备在第二2d平面内的运动并且基于可移动地安装到用户输入设备的手致动选择器的运动来控制光标在第一二维(2d)平面内的运动的方法。当手致动选择器以小于第一阈值速率的速率相对于用户输入设备移动时,致使光标根据恒定移动比率跟随用户输入设备在第二2d平面内的运动在第一2d平面内移动。响应于手致动选择器相对于控制器的移动的速率在第一阈值速率和第二阈值速率之间,致使光标根据随着手致动选择器相对于用户输入设备的移动的速率增加而降低的移动比率跟随用户接口设备在第二2d平面内的运动在第一2d平面内移动。响应于手致动选择器相对于用户输入设备的移动的速率降低到第二阈值速率之下,致使光标根据随着手致动选择器相对于用户输入设备的移动的速率降低而增加的运动比率跟随用户输入设备在第二2d平面内的运动在第一2d平面内移动。
技术特征:
1.一种控制由可移动地安装到安装结构的手致动选择器对点击事件的致动的方法,包括:
2.根据权利要求1所述的方法,
3.根据权利要求1所述的方法,
4.根据权利要求1所述的方法,
5.根据权利要求4所述的方法,
6.根据权利要求4所述的方法,
7.根据权利要求4所述的方法,
8.根据权利要求1所述的方法,进一步包括:
9.根据权利要求1所述的方法,进一步包括:
10.根据权利要求1所述的方法,进一步包括:
11.根据权利要求1所述的方法,进一步包括:
12.根据权利要求1所述的方法,进一步包括:
13.根据权利要求4所述的方法,进一步包括:
14.根据权利要求1所述的方法,
15.根据权利要求1所述的方法,
16.一种通过可移动地安装到安装结构的手致动选择器控制对点击事件的致动的装置,包括:
17.根据权利要求16所述的装置,
18.根据权利要求16所述的装置,
19.根据权利要求16所述的装置,
20.根据权利要求16所述的装置,
21.根据权利要求20所述的装置,
22.根据权利要求20所述的装置,
23.根据权利要求16所述的装置,
24.根据权利要求16所述的装置,进一步包括:
25.根据权利要求16所述的装置,进一步包括:
26.根据权利要求16所述的装置,进一步包括:
27.一种基于用户输入设备在第二二维平面即第二2d平面内的运动并且基于可移动地安装到所述用户输入设备的手致动选择器的运动来控制光标在第一二维平面即第一2d平面内的运动的方法,包括:
28.根据权利要求27所述的方法,进一步包括:
29.根据权利要求28所述的方法,进一步包括:
30.一种基于用户输入设备在第二二维触觉平面即第二2d触觉平面内的运动并且基于可移动地安装到所述用户输入设备的手致动选择器的运动来控制光标在显示系统中的第一二维图像显示平面即第一2d图像显示平面内的运动的装置,包括:
31.根据权利要求30所述的装置,进一步包括:
32.根据权利要求30所述的装置,进一步包括:
技术总结
提供了一种控制由可移动地安装到安装结构的手致动选择器对点击事件的致动的方法包括:在第一控制状态下,向手致动选择器施加维持力;在第二控制状态下,向手致动选择器施加随着手致动选择器从中性位移位置的位移增加而增加的触觉力;施加点击事件信号以致使在显示系统处发生点击事件,在第三控制状态下,向手致动选择器施加量级降低到减小的量级的触觉力。
技术研发人员:E·努希贝赞贾尼,K·瓦扎,A·苏雷什,B·D·伊科威兹,S·达菲,S·戈什
受保护的技术使用者:直观外科手术操作公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!