一种张紧力可调的工业机械臂
本技术涉及机械臂设备,特别涉及一种张紧力可调的工业机械臂。
背景技术:
1、机械臂是指高精度,多输入多输出、高度非线性、强耦合的复杂系统,因其独特的操作灵活性,已在工业装配、安全防爆等领域得到广泛应用,机械臂是一个复杂系统,存在着参数摄动、外界干扰及未建模动态等不确定性,因而机械臂的建模模型也存在着不确定性,对于不同的任务,需要将机械臂放置在不同的工作位置。
2、机械臂在使用的时候通常使用两个夹板相互靠近夹紧物体,然后带动物体移动位置,工厂通常使用机械臂利于夹板夹紧纸箱移动位置,特别是通过夹板夹紧较大纸箱的时候,由于夹板的底部通常并为安装底板支撑纸箱,如果夹板的夹紧力太大容易损坏纸箱,而夹板的夹紧力太小纸箱容易向下侧滑动脱离夹板的固定作用,影响机械臂移动纸箱的稳定性。
技术实现思路
1、本实用新型的目的在于至少解决现有技术中存在的技术问题之一,提供一种张紧力可调的工业机械臂,能够解决夹板夹紧较大纸箱的时候,由于夹板的底部通常并为安装底板支撑纸箱,如果夹板的夹紧力太大容易损坏纸箱,而夹板的夹紧力太小纸箱容易向下侧滑动脱离夹板的固定作用的问题。
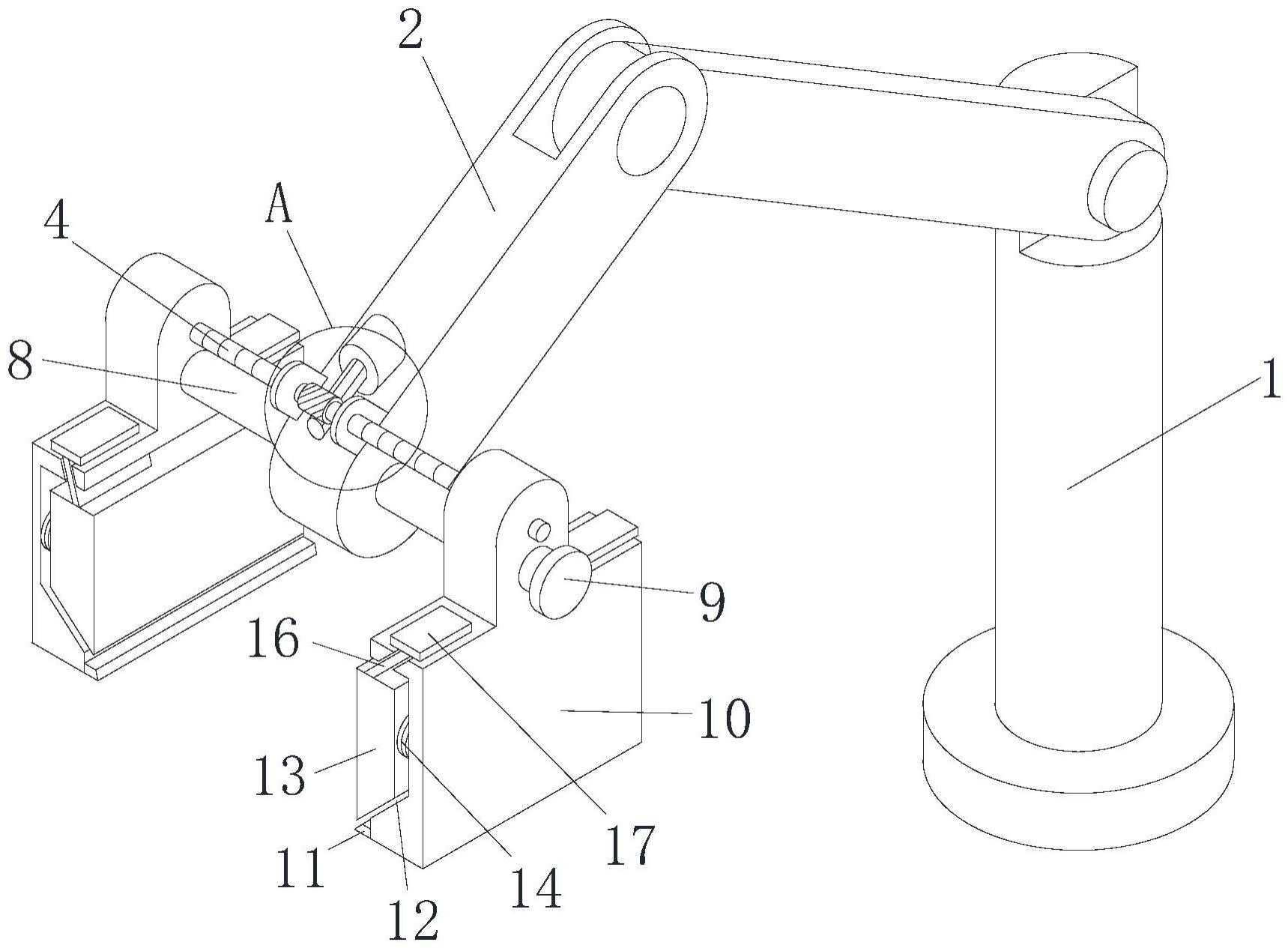
2、为实现上述目的,本实用新型提供如下技术方案:一种张紧力可调的工业机械臂,包括支撑柱,所述支撑柱的顶部设置有转动杆,转动杆的表面固定连接有两个固定块,转动杆的内部固定套接有固定轴,固定轴的左右两端均固定连接有圆盘,固定轴的表面滑动套接有两个夹板,夹板的表面开设有梯形槽,梯形槽的底壁为倾斜的斜面,梯形槽的内部设置有提升装置。
3、优选的,两个所述固定块的内部转动套接有螺纹杆,螺纹杆的左右两端开设有方向相反的螺纹,螺纹杆的表面固定套接有蜗轮。
4、优选的,所述转动杆的表面固定连接有电机,电机的输出端固定连接有蜗杆,蜗杆与蜗轮啮合连接。
5、优选的,两个所述夹板均螺纹套接在螺纹杆的表面,两个夹板相对的一侧均固定连接有底板。
6、优选的,所述提升装置包括有梯形块,梯形块滑动连接在梯形槽的内部,梯形块的底部为倾斜的斜面,梯形块的表面固定连接有弹簧。
7、优选的,所述夹板的顶部开设有两个斜槽,两个斜槽的内部均滑动连接有斜板。
8、优选的,两个所述斜板的下侧均固定连接在梯形块的顶部,两个斜板的上侧均固定连接有方型板,两个夹板上设置有相同的结构。
9、与现有技术相比,本实用新型的有益效果是:
10、(1)、该张紧力可调的工业机械臂,梯形块通过与纸箱的挤压作用滑动进入梯形槽的内部挤压弹簧,弹簧给梯形块一个反向作用力,梯形块滑动挤压梯形槽的底壁,使得梯形块向上侧滑动,两个梯形块向上侧滑动带动纸箱向上侧滑动,两个夹板夹紧纸箱完毕之后,两个底板滑动至纸箱的底部,进而通过两个底板对纸箱进行支撑,防止两个夹板的夹紧力太小纸箱向下侧滑动至地面造成损坏,提升该张紧力可调的工业机械臂移动纸箱的稳定性。
11、(2)、该张紧力可调的工业机械臂,梯形块滑动进入梯形槽内部的过程中带动斜板在斜槽的内部滑动,两个斜板滑动带动顶部的两个方型板向上侧滑动,并通过斜板对梯形块进行限位,保证梯形块倾斜向上侧滑动,防止梯形块滑动的过程中发生倾斜,进而保证两个梯形块滑动顺利带动纸箱向上侧移动,并使两个底板滑动至纸箱的底部对纸箱支撑。
技术特征:
1.一种张紧力可调的工业机械臂,包括支撑柱(1),其特征在于:所述支撑柱(1)的顶部设置有转动杆(2),转动杆(2)的表面固定连接有两个固定块(3),转动杆(2)的内部固定套接有固定轴(8),固定轴(8)的左右两端均固定连接有圆盘(9),固定轴(8)的表面滑动套接有两个夹板(10),夹板(10)的表面开设有梯形槽(12),梯形槽(12)的底壁为倾斜的斜面,梯形槽(12)的内部设置有提升装置。
2.根据权利要求1所述的一种张紧力可调的工业机械臂,其特征在于:两个所述固定块(3)的内部转动套接有螺纹杆(4),螺纹杆(4)的左右两端开设有方向相反的螺纹,螺纹杆(4)的表面固定套接有蜗轮(5)。
3.根据权利要求2所述的一种张紧力可调的工业机械臂,其特征在于:所述转动杆(2)的表面固定连接有电机(6),电机(6)的输出端固定连接有蜗杆(7),蜗杆(7)与蜗轮(5)啮合连接。
4.根据权利要求3所述的一种张紧力可调的工业机械臂,其特征在于:两个所述夹板(10)均螺纹套接在螺纹杆(4)的表面,两个夹板(10)相对的一侧均固定连接有底板(11)。
5.根据权利要求4所述的一种张紧力可调的工业机械臂,其特征在于:所述提升装置包括有梯形块(13),梯形块(13)滑动连接在梯形槽(12)的内部,梯形块(13)的底部为倾斜的斜面,梯形块(13)的表面固定连接有弹簧(14)。
6.根据权利要求5所述的一种张紧力可调的工业机械臂,其特征在于:所述夹板(10)的顶部开设有两个斜槽(15),两个斜槽(15)的内部均滑动连接有斜板(16)。
7.根据权利要求6所述的一种张紧力可调的工业机械臂,其特征在于:两个所述斜板(16)的下侧均固定连接在梯形块(13)的顶部,两个斜板(16)的上侧均固定连接有方型板(17),两个夹板(10)上设置有相同的结构。
技术总结
本技术公开了一种张紧力可调的工业机械臂,涉及机械臂设备技术领域,该张紧力可调的工业机械臂,包括支撑柱,所述支撑柱的顶部设置有转动杆,转动杆的表面固定连接有两个固定块,转动杆的内部固定套接有固定轴,固定轴的左右两端均固定连接有圆盘,固定轴的表面滑动套接有两个夹板,夹板的表面开设有梯形槽,梯形槽的底壁为倾斜的斜面,梯形槽的内部设置有提升装置,该张紧力可调的工业机械臂,梯形块滑动挤压梯形槽的底壁,使得梯形块向上侧滑动,两个梯形块向上侧滑动带动纸箱向上侧滑动,两个底板滑动至纸箱的底部,进而通过两个底板对纸箱进行支撑,防止两个夹板的夹紧力太小纸箱向下侧滑动至地面造成损坏。
技术研发人员:刘一扬,李一琳,霍青瑶,张玮琛,徐亚豪,周冰涛,赵帅旗,李康
受保护的技术使用者:郑州财经学院
技术研发日:20230325
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!