手术手柄机构、手术装置及手术机器人的制作方法
1.本发明涉及医疗设备技术领域,特别是涉及一种手术手柄机构、手术装置及手术机器人。
背景技术:
2.在腹腔微创手术领域,操作者可以通过操作手柄对手术器械进行控制,以实现手术器械多方位的摆动、转动及位于器械末端的执行件的张合动作。
3.现有的操作手柄通常为枪式手柄,操作者在握持操作手柄时,主要依靠手指与操作手柄握持部进行握持,由于医疗器械设备的无菌要求,需要在操作手柄外包裹无菌罩单,操作者手持具有无菌罩单的操作手柄进行作业。
4.操作者在使用现有的操作手柄作业时,由于无菌罩单表面较为光滑,握持时容易出现操作手柄滑脱的问题,易造成操作失误,严重的可导致手术事故。
技术实现要素:
5.本发明实施例提供一种手术手柄机构、手术装置及手术机器人,以解决操作者在使用现有的操作手柄作业时,由于无菌罩单表面较为光滑,握持时容易出现操作手柄滑脱的问题。
6.为了解决上述问题,本发明是这样实现的:第一方面,本发明实施例提供一种手术手柄机构,手术手柄机构包括控制手柄、可调把手以及指扣组件。可调把手和指扣组件分别连接于控制手柄,指扣组件用于控制手术器械的末端执行件旋转和/或张合。指扣组件包括换向器和手指随动环,手指随动环包括扣持部、底座及连接件。扣持部连接于底座,并与底座的第一底面围成扣持空间。连接件连接于底座的第二底面,手指随动环通过连接件与换向器可拆卸连接,其中,第一底面和第二底面为相互背离的两个面。
7.第二方面,本发明实施例还提供了一种手术装置,包括上述的手术手柄机构。
8.第三方面,本发明实施例还提供了一种手术机器人,包括上述的手术装置。
9.在本发明实施例中,手术手柄机构包括控制手柄、可调把手以及指扣组件,可调把手和指扣组件分别连接于控制手柄,可调把手与控制手柄可为操作者提供握持空间,可调把手能够与操作者的手指虎口抵接形成支撑,将控制手柄的重量分摊至虎口,大大减少了手指的握持负担。操作者对控制手柄和指扣组件执行转动或张合的动作,以控制手术器械的末端执行件旋转和/或张合。指扣组件包括换向器和手指随动环,手指随动环包括扣持部、底座及连接件,扣持部能够为操作者的手指提供扣持空间,提升了操作者握持控制手柄时的稳定性,防止滑脱。手指随动环通过连接件与换向器可拆卸连接,可先将控制手柄设置于无菌罩单的内侧,再将手指随动环通过可拆卸连接的方式设置于无菌罩单的外侧,由于手指随动环外置于无菌罩单,和手指直接接触,防滑性好,进一步降低了控制手柄滑脱的可能,提升了手术安全性。
附图说明
10.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
11.图1为本发明实施例提供的一种手术手柄机构结构示意图之一;图2为本发明实施例提供的一种手术手柄机构结构示意图之二;图3为本发明实施例提供的一种手术手柄机构结构示意图之三;图4为本发明实施例提供的一种手指随动环结构示意图之一;图5为本发明实施例提供的一种手指随动环结构示意图之二;图6为本发明实施例图5中沿a-a方向的剖面结构示意图;图7为本发明实施例提供的另一种手指随动环结构示意图之一;图8为本发明实施例提供的另一种手指随动环结构示意图之二;图9为本发明实施例提供的一种手术手柄机构结构示意图之四;图10为本发明实施例提供的一种手术手柄机构操作方式示意图之一;图11为本发明实施例提供的一种手术手柄机构操作方式示意图之二。
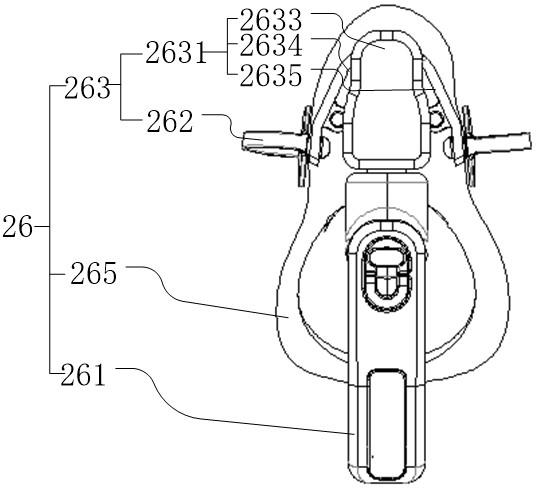
12.附图标记说明26-手术手柄机构;261-可调把手;262-手指随动环;263-指扣组件;265-控制手柄;2631-换向器;2633-换向器主体;2634-第一压板;2635-第二压板;2621-扣持部;2622-底座;2623-连接件;2624-第一卡接部;2625-第二卡接部;2626-卡接片;2627-第一滑动片;2628-第二滑动片;2641-第三卡接部;2642-第四卡接部;2643-第三半球结构;2644-第四半球结构。
具体实施方式
13.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
14.应理解,说明书通篇中提到的“一个实施例”或“一实施例”意味着与实施例有关的特定特征、结构或特性包括在本发明的至少一个实施例中。因此,在整个说明书各处出现的“在一个实施例中”或“在一实施例中”未必一定指相同的实施例。此外,这些特定的特征、结构或特性可以任意适合的方式结合在一个或多个实施例中。
15.参照图1至图11所示,本发明实施例提供了一种手术手柄机构26,手术手柄机构26包括控制手柄265、可调把手261以及指扣组件263;可调把手261和指扣组件263分别连接于控制手柄265,指扣组件263用于控制手术器械的末端执行件旋转和/或张合。指扣组件263包括换向器2631和手指随动环262,手指随动环262包括扣持部2621、底座2622及连接件2623。扣持部2621连接于底座2622,并与底座2622的第一底面围成扣持空间。连接件2623连接于底座2622的第二底面,手指随动环262通过连接件2623与换向器2631可拆卸连接,其中,第一底面和第二底面为相互背离的两个面。
16.具体地,手术手柄机构26包括控制手柄265、可调把手261及指扣组件263,操作者通过控制手柄265和指扣组件263可控制手术器械的末端执行件弯曲、旋转以及张合。在控制手柄265上设置有可调把手261,可调把手261与控制手柄265呈一定角度,与控制手柄265的一侧形成握持空间,操作者在使用控制手柄265时,手掌与控制手柄265贴合,虎口上搭接有可调把手261,可调把手261将控制手柄265的一部分重量分摊至虎口,操作者无需对控制手柄265持续保持握持力,大大减少了手指的握持负担。
17.指扣组件263连接于控制手柄265靠近近动力主机的一侧,指扣组件263与控制手柄265的连接方式可以为螺栓连接、卡接等,指扣组件263包括换向器2631和手指随动环262,操作者可通过换向器2631的转动或者张合以控制手术器械的末端执行件旋转和/或张合。
18.手指随动环262包括扣持部2621、底座2622及连接件2623,底座2622的形状可以为矩形、圆形、椭圆形等,底座2622包括相互背离的第一底面和第二底面,扣持部2621连接于底座2622的第一底面,扣持部2621的形状可以为半圆形或多边形,并与底座2622的第一底面围成扣持空间,扣持空间可容纳操作者的手指。在实际使用过程中,操作者可将手指穿设于手指随动环262的扣持空间中,以便捷的控制换向器2631执行相应的旋转或张合动作。同时,手指随动环262还能与操作者的手指搭接,减少了手指的握持负担。
19.手指随动环262的第二底面设置有连接件2623,并通过连接件2623与换向器2631可拆卸连接,具体的可拆卸连接方式可以为卡接、销接或者螺纹连接等。采用可拆卸连接方式,便于手指随动环262拆卸安装。由于医疗器械设备的无菌要求,需要在控制手柄265外包裹无菌罩单,操作者手持具有无菌罩单的控制手柄265进行作业,而无菌罩单表面较为光滑,操作者手持时容易出现滑脱的现象。为避免控制手柄265滑脱,在实际使用时,可先使用无菌罩单对控制手柄265进行包裹,然后将手指随动环262置于无菌罩单外侧,并通过卡接的方式与控制手柄265连接,有利于避免无菌罩单包裹整个控制手柄265后导致接触面太滑,导致的松脱、误操作问题。
20.在本发明实施例中,手术手柄机构26包括控制手柄265、可调把手261以及指扣组件263,可调把手261和指扣组件263分别连接于控制手柄265,可调把手261与控制手柄265可为操作者提供握持空间,可调把手261能够与操作者的手指虎口抵接形成支撑,将控制手柄265的重量分摊至虎口,大大减少了手指的握持负担。操作者对控制手柄265和指扣组件263执行转动或张合的动作,以控制手术器械的末端执行件旋转和/或张合。指扣组件263包括换向器2631和手指随动环262,手指随动环262包括扣持部2621、底座2622及连接件2623,扣持部2621能够为操作者的手指提供扣持空间,提升了操作者握持控制手柄265时的稳定性,防止滑脱。手指随动环262通过连接件2623与换向器2631可拆卸连接,可先将控制手柄265设置于无菌罩单的内侧,再将手指随动环262通过可拆卸连接的方式设置于无菌罩单的外侧,由于手指随动环262外置于无菌罩单,和手指直接接触,防滑性好,进一步降低了控制手柄265滑脱的可能,提升了手术安全性。
21.可选地,参照图1至图3所示,换向器2631包括换向器主体2633、第一压板2634以及第二压板2635。换向器主体2633连接于控制手柄265,换向器主体2633自身绕轴线与控制手柄265相对转动,以控制手术器械的末端执行件旋转。第一压板2634和第二压板2635相对设置,并分别连接于换向器主体2633的两侧,第一压板2634和第二压板2635相对张合,以控制
手术器械的末端执行件张合。
22.具体地,通过换向器2631控制手术器械的末端执行件旋转和/或张合动作的具体结构包括:换向器主体2633、第一压板2634以及第二压板2635,换向器主体2633连接于控制手柄265靠近动力主机的一侧,换向器主体2633自身绕轴线与控制手柄265相对转动,以控制手术器械的末端执行件旋转。第一压板2634和第二压板2635相对设置,第一压板2634和第二压板2635分别与换向器2631连接并位于换向器2631的两侧,第一压板2634、第二压板2635以及换向器主体2633上设置有位移传感器,能够获取第一压板2634、第二压板2635以及换向器主体2633的相对运动,并将位置变化信息传输至动力主机,从而操作者可通过控制换向器主体2633的转动以及第一压板2634和第二压板2635的相对张合,以控制手术器械的末端执行件旋转或张合。
23.可选地,参照图1至图3所示,手指随动环262连接于第一压板2634和/或第二压板2635,手指随动环262绕自身轴线与第一压板2634或第二压板2635相对转动。
24.具体地,手指随动环262的数量可以为一个或者两个,当只有一个手指随动环262时,手指随动环262可设置于第一压板2634或第二压板2635上。当手指随动环262的数量的两个时,可在第一压板2634和第二压板2635上同时设置手指随动环262。手指随动环262第一压板2634或第二压板2635的连接方式可以为卡接、销接或者螺纹连接等。
25.手指随动环262通过连接件2623与第一压板2634或第二压板2635连接,手指随动环262的轴线依次平分扣持部2621、底座2622以及连接件2623,手指随动环262绕自身轴线与第一压板2634或第二压板2635相对转动。当操作者的手指穿入手指随动环262的扣持空间中,并对第一压板2634或第二压板2635以及换向器主体2633执行旋转或张合的动作时,手指随动环262能够通过自转与手指的姿态实时进行匹配,所以操作过程中手指不受阻碍,使操作者的手指随时处于舒适的操作位置,降低手指的疲劳程度,进而提升了控制手柄265的操作精度。
26.可选地,参照图9所示,第一压板2634或第二压板2635设置有安装孔,手指随动环262通过连接件2623与第一压板2634或第二压板2635卡接。
27.具体地,手指随动环262上设置有连接件2623,第一压板2634或第二压板2635上设置有与连接件2623配合的安装孔,手指随动环262通过连接件2623与第一压板2634或第二压板2635卡接。连接件2623的具体可以为卡接头、卡勾等结构,安装孔的尺寸与连接件2623的尺寸相匹配。采用卡接的方式,便于手指随动环262的拆卸安装,并且,在控制手柄265上包裹有无菌罩单时,手指随动环262卡接在无菌罩单外侧,也不会戳破无菌罩单,避免对手术过程造成影响。
28.可选地,参照图4至图6所示,连接件2623包括第一卡接部2624、第二卡接部2625以及弹性卡片。第一卡接部2624和第二卡接部2625相对设置形成卡槽,弹性卡片沿第一方向可滑动的嵌设于卡槽内。当弹性卡片沿第一方向在卡槽内滑动时,卡槽沿第一方向的尺寸逐渐增大,其中,第一方向为垂直于第二底面并由靠近底座2622至远离底座2622延伸的方向。
29.具体地,连接件2623包括第一卡接部2624、第二卡接部2625以及弹性卡片,第一卡接部2624和第二卡接部2625均设置于底座2622的第二底面,第一卡接部2624和第二卡接部2625相对设置形成卡槽,卡槽靠近底座2622的一侧开设有开口,弹性卡片的尺寸不大于卡
槽,弹性卡片由卡槽的槽口处插入,并沿第一方向在卡槽内滑动,第一方向为垂直于第二底面并由靠近底座2622至远离底座2622延伸的方向,操作者可通过手动的方式驱动弹性卡片在卡槽内滑动,也可设置驱动机构,通过驱动机构带动弹性卡片在卡槽内滑动。
30.当弹性卡片处于初始位置时,弹性卡片并未完全嵌设于卡槽内,此时,第一卡接部2624和第二卡接部2625部分贴合,卡槽呈锥形,尺寸较小,对应的连接件2623远离底座2622一端的尺寸也较小,可顺利嵌入安装孔内。当连接件2623嵌入安装孔后,驱动弹性卡片沿第一方向在卡槽内滑动,第一卡接部2624和第二卡接部2625在弹性卡片的支撑作用下相对分离,卡槽尺寸扩张,对应的连接件2623远离底座2622一端的尺寸也扩张,安装孔与连接件2623卡紧,手指随动环262与第一压板2634或第二压板2635实现卡接固定。
31.同样地,在拆卸手指随动环262时,可将弹性卡片沿第一方向的反方向抽出,第一卡接部2624和第二卡接部2625失去弹性卡片的支撑作用,相对靠近,卡槽尺寸缩小,对应的连接件2623远离底座2622一端的尺寸也缩小,手指随动环262可顺利由安装孔取出。
32.可选地,参照图4至图6所示,第一卡接部2624远离底座2622的一端设置有第一凸台,第二卡接部2625远离底座2622的一端设置有第二凸台,第一凸台和第二凸台相对设置形成夹持空间。弹性卡片的端部设置有限位部。当限位部穿过夹持空间时,第一凸台和第二凸台与限位部卡接。
33.具体地,第一卡接部2624和第二卡接部2625相对设置,在相对的面上分别设置有第一凸台和第二凸台,且第一凸台和第二凸台分别设置于第一卡接部2624和第二卡接部2625远离底座2622的一端。第一凸台和第二凸台沿第一方向的截面形状可以为半圆柱形、三棱柱形等,第一凸台和第二凸台相对设置形成夹持空间,弹性卡片的端部设置有限位部,夹持空间的尺寸要小于限位部的尺寸,限位部沿第一方向截面的形状可以为圆形、多边形等。
34.当弹性卡片沿第一方向在卡槽内滑动时,通过施加一定的推力,限位部会穿过第一凸台和第二凸台形成的夹持空间,第一凸台和第二凸台即与限位部卡接,对弹性卡片实现卡接固定,避免出现弹性卡片由卡槽内滑脱,导致手指随动环262脱落的问题。拆卸手指随动环262时,可施加一个拉力使限位部由夹持空间内拔出,弹性卡片即可顺利由卡槽滑出。
35.可选地,参照图4至图6所示,沿第一方向,第一凸台或第二凸台的两侧设置有导向面。导向面为弧面。
36.具体地,沿第一方向,第一凸台或第二凸台的两侧均设置有导向面,且导向面为弧面,当限位部穿过第一凸台和第二凸台形成的夹持空间时,弧形导向面能够起到导向作用,避免限位部与第一凸台或第二凸台之间出现锁死现象,导致弹性卡片无法正常安装或取出。同时,弧形导向面还能减少限位部与第一凸台或第二凸台之间应力的作用,提升使用耐久性。
37.可选地,参照图4至图6所示,底座2622的第一底面设置有第一滑槽,弹性卡片包括卡接片2626和第一滑动片2627,卡接片2626与第一滑动片2627弹性连接。第一滑动片2627通过第一滑槽与底座2622滑动连接。在第一滑动片2627沿第一滑槽由远离底座2622至靠近底座2622的方向滑动时,卡接片2626沿第一方向在卡槽内滑动。
38.具体地,弹性卡片包括卡接片2626和第一滑动片2627,卡接片2626与第一滑动片
2627弹性连接,第一滑动片2627的形状可以为圆形、椭圆形或者矩形,卡接片2626采用弹性材质,如聚氯乙烯材质或金属材质,卡接片2626弹性连接于第一滑动片2627上,具体可采用粘接或焊接的方式。底座2622的第一底面设置有第一滑槽,第一滑槽与第一滑动片2627的形状相匹配,第一滑动片2627通过第一滑槽与底座2622滑动连接。
39.第一滑动片2627沿第一滑槽由远离底座2622至靠近底座2622的方向滑动时,会带动卡接片2626沿第一方向在卡槽内滑动,操作者可通过推抵第一滑动片2627,实现卡接片2626在卡槽内的插拔,便于手指随动环262的安装和拆卸。
40.可选地,参照图4至图6所示,第一滑动片2627靠近扣持部2621的一侧设置有按压区域。
41.具体地,第一滑动片2627通过第一滑槽与底座2622滑动连接,进而带动卡接片2626沿第一方向在卡槽内滑动,在第一滑动片2627靠近扣持部2621的一侧的表面设置有按压区域,按压区域可以为凹槽、凸台或者粗糙处理后的结构,便于操作者使用手指推抵第一滑动片2627,避免打滑。
42.可选地,参照图4至图6所示,底座2622的第二底面设置有第二滑槽及第二滑动片2628。第二卡接部2625与第二滑动片2628连接。在第二滑动片2628沿第二滑槽由远离底座2622至靠近底座2622的方向滑动时,第二卡接部2625与第一卡接部2624对接形成卡槽。
43.具体地,第一卡接部2624、第二卡接部2625以及底座2622可采用一体式结构进行制作,也可采用分体方式制作再进行组装。采用组装的方式,底座2622的第二底面设置有第二滑槽及第二滑动片2628,第二滑槽和第二滑动片2628的形状相匹配,第二滑动片2628通过第二滑槽与底座2622滑动连接。在第二滑动片2628上设置有第二卡接部2625,第二卡接部2625与第二滑动片2628可通过粘接、焊接等方式固定,也可采用一体开模的方式进行制作。当第二滑动片2628沿第二滑槽由远离底座2622至靠近底座2622的方向滑动时,会带动第二卡接部2625同时移动,并与第一卡接部2624对接形成卡槽。
44.第一卡接部2624、第二卡接部2625以及底座2622采用分体式结构,装配时,可先将第一滑动片2627以及卡接片2626放置到底座2622上的预设位置,然后再将第二滑动片2628以及第二卡接部2625扣在底座2622上,对弹性卡片进行夹持,便于弹性卡片的装配。
45.可选地,参照图4至图6所示,第一卡接部2624远离底座2622的一端设置有第一半球结构。第二卡接部2625远离底座2622的一端设置有第二半球结构。第一半球结构和第二半球结构的平面一侧相对设置。
46.具体地,第一卡接部2624远离底座2622的一端设置有第一半球结构,第二卡接部2625远离底座2622的一端设置有第二半球结构,第一半球结构和第二半球结构的平面一侧相对设置。当无菌罩单包裹控制手柄265和安装孔,第一半球结构和第二半球结构通过安装孔进行卡接时,第一半球结构和第二半球结构对接形成完整的球头结构,球头结构表面较为光滑,不会戳破无菌罩单,避免对手术过程产生影响。
47.可选地,参照图7至图8所示,连接件2623包括第三卡接部2641、第四卡接部2642。第三卡接部2641和第四卡接部2642相对间隔设置。第三卡接部2641由底座2622的第二底面朝远离底座2622的方向延伸,并在端部形成第三半球结构2643。第四卡接部2642由底座2622的第二底面朝远离底座2622的方向延伸,并在端部形成第四半球结构2644。当第三卡接部2641和第四卡接部2642相对靠近时,沿第三卡接部2641或第四卡接部2642的延伸方
向,连接件2623的尺寸收窄。当手指随动环262嵌设于安装孔时,第三半球结构2643和第四半球结构2644与安装孔卡接。
48.具体地,本发明实施例还提供了另一种手指随动环262结构,手指随动环262包括连接件2623,连接件2623包括第三卡接部2641、第四卡接部2642,第三卡接部2641和第四卡接部2642相对间隔设置,第三卡接部2641由底座2622的第二底面朝远离底座2622的方向延伸,并在端部形成第三半球结构2643,第四卡接部2642由底座2622的第二底面朝远离底座2622的方向延伸,并在端部形成第四半球结构2644。第三卡接部2641和第四卡接部2642与底座2622可采用一体式结构,第三卡接部2641和第四卡接部2642采用弹性材质,具备一定的可变形量。
49.在安装上述手指随动环262时,可将第三卡接部2641、第四卡接部2642放置于安装孔处,并施加一定的推力,在安装孔的挤压作用下,第三卡接部2641和第四卡接部2642相对靠近,沿第三卡接部2641或第四卡接部2642的延伸方向,连接件2623的尺寸收窄,从而连接件2623端部的第三半球结构2643和第四半球结构2644能够顺利穿过安装孔。当第三半球结构2643和第四半球结构2644顺利穿过安装孔后,第三卡接部2641和第四卡接部2642由于自身弹性作用,产生回复力,连接件2623的尺寸扩张,从而使第三半球结构2643和第四半球结构2644与安装孔卡紧,实现手指随动环262与控制手柄265的卡接。拆下手指随动环262,沿相反方向施加拉力,在安装孔的挤压作用下,第三卡接部2641和第四卡接部2642相对靠近,沿第三卡接部2641或第四卡接部2642的延伸方向,连接件2623的尺寸收窄,从而连接件2623端部的第三半球结构2643和第四半球结构2644能够顺利由安装孔穿出。采用上述结构的手指随动环262,结构简单,使用便捷,大大降低了生产成本。
50.本发明实施例还提供了一种手术装置,包括上述的手术手柄机构26。
51.具体地,采用上述手术手柄机构26,手术手柄机构26包括控制手柄265、可调把手261以及指扣组件263,可调把手261和指扣组件263分别连接于控制手柄265,可调把手261与控制手柄265可为操作者提供握持空间,可调把手261能够与操作者的手指虎口抵接形成支撑,将控制手柄265的重量分摊至虎口,大大减少了手指的握持负担。操作者对控制手柄265和指扣组件263执行转动或张合的动作,以控制手术器械的末端执行件旋转和/或张合。指扣组件263包括换向器2631和手指随动环262,手指随动环262包括扣持部2621、底座2622及连接件2623,扣持部2621能够为操作者的手指提供扣持空间,提升了操作者握持控制手柄265时的稳定性,防止滑脱。手指随动环262通过连接件2623与换向器2631可拆卸连接,可先将控制手柄265设置于无菌罩单的内侧,再将手指随动环262通过可拆卸连接的方式设置于无菌罩单的外侧,由于手指随动环262外置于无菌罩单,和手指直接接触,防滑性好,进一步降低了控制手柄265滑脱的可能,提升了手术安全性。
52.可选地,手术装置还包括动力主机及手术器械。手术手柄机构26与动力主机的第一端连接,手术器械与动力主机的第二端连接,其中,第一端和第二端为动力主机相对的两端。
53.具体地,手术手柄机构26通过卡接或螺栓连接的方式固定于动力主机的第一端,手术器械连接于动力主机的第二端,手术手柄机构26通过控制手柄265的转动、换向器2631的转动以及第一压板2634和第二压板2635的相对开合,带动对应的位置传感器以及磁铁相对运动,产生位置变化信号,并通过通信线缆传输至动力主机,动力主机的驱动机构控制手
术器械的末端执行件进行对应的操作。手指随动环262与第一压板2634和/或第二压板2635连接,手指随动环262的扣持部2621能够为操作者的手指提供扣持空间,提升了操作者握持控制手柄265时的稳定性,防止滑脱。手指随动环262通过连接件2623与第一压板2634和/或第二压板2635可拆卸连接,可先将控制手柄265设置于无菌罩单的内侧,再将手指随动环262通过可拆卸连接的方式设置于无菌罩单的外侧,由于手指随动环262外置于无菌罩单,和手指直接接触,防滑性好,进一步降低了控制手柄265滑脱的可能,提升了手术安全性。
54.本发明实施例还提供了一种手术机器人,包括:支撑座、支撑臂组件以及上述的手术装置。支撑臂组件连接于动力主机和支撑座之间,用于将动力主机支撑在三维空间中。
55.具体地,手术机器人具有将手术装置支撑悬吊在三维空间中的支撑座,手术装置通过支撑臂组件连接于动力主机和支撑座之间。例如,可以通过支撑上臂和支撑下臂以及浮动杆组件组成支撑臂组件将手术装置支撑。当操作人员握持手术手柄机构26进行操纵时,依靠支撑臂组件可以自由停置在三维空间中,消除操作人员的疲劳感。并且,上述的支撑座还可以提供滚轮一类的行走机构,以便于该手术机器人的搬运移动。
56.上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1