手术控制器械组件、分体式手术装置及软组织机器人的制作方法
1.本发明实施例涉及手术器械技术领域,具体而言,涉及一种手术控制器械组件、分体式手术装置及软组织机器人。
背景技术:
2.手术机器人是医疗器械行业发展趋势,其中最重要的一环便是手术器械与手术器械驱动模组的设计,在手术器械驱动模组方面,驱动模组的结构越紧凑,体积越小,在机械臂控制系统中就越可以减少机械臂支撑力矩和惯性力,使得机械臂的驱动更加平稳。
3.同时,目前的手术器械控制方式为机械臂控制,器械自身具备弯曲、夹合,旋转的多个自由度,但是器械钳头的运动靠机械臂完成,导致器械钳头动作幅度大,较难完成精细控制。
技术实现要素:
4.本发明实施例提供一种手术控制器械组件、分体式手术装置及软组织机器人,旨在利用驱动模组更精细地控制器械钳头的运动。
5.本发明实施例第一方面提供一种手术控制器械组件,包括:手术器械和电机模组;手术器械包括:第一传动组件、两个第二传动机构、万向蛇骨组件以及钳头组件,每个第二传动机构包括两个第二传动组件;电机模组包括:第一驱动组件和两个第二驱动组件,两个第二驱动组件与两个第二传动机构一一对应;第一驱动组件驱动第一传动组件旋转,进而控制钳头组件旋转,以及,第一驱动组件驱动第一传动组件移动,进而控制钳头组件夹合或张开;两个第二传动组件,在对应的第二驱动组件的驱动作用下沿相反方向运动,进而控制万向蛇骨组件带动钳头组件弯曲。
6.可选地,第一驱动组件包括:第一电机、第二电机、第一连接公轴、中间传动轴和钢绳传动件,第一连接公轴与第一传动组件连接,中间传动轴与第一电机和第一连接公轴分别通过齿轮副连接,第一电机提供的驱动力经由中间传动轴传动至第一连接公轴,以驱动第一连接公轴旋转,使得第一连接公轴带动第一传动组件旋转;第一连接公轴上设置有第一固定件,钢绳传动件上缠绕有钢绳,钢绳的连接段与第一固定件固定连接,第二电机提供的驱动力经由钢绳传动件传动至钢绳,以驱动钢绳沿第一连接公轴的轴向移动,带动第一固定件移动,进而带动第一连接公轴移动,使得第一连接公轴带动第一传动组件移动。
7.可选地,第二驱动组件包括:第三电机、钢绳传动部和两个第二连接公轴,每个第二连接公轴与对应的第二传动组件连接;两个第二连接公轴上各自设置有第二固定件和第三固定件;
钢绳传动部上缠绕有钢绳,且钢绳的第一钢绳段与第二固定件固定连接,钢绳的第二钢绳段与第三固定件固定连接;第三电机提供的驱动力经由钢绳传动部传动至钢绳,以驱动第一钢绳段和第二钢绳段沿相反方向运动,带动第二固定件和第三固定件沿相反方向运动,进而带动两个第二连接公轴沿相反方向运动,使得两个第二传动组件沿相反方向运动。
8.可选地,第一传动组件包括第一钢丝和第一连接母轴,第一连接母轴的一端与第一驱动组件连接,另一端与第一钢丝连接,第一钢丝远离第一连接母轴的一端与钳头组件连接。
9.可选地,每个第二传动组件包括第二钢丝和第二连接母轴,第二连接母轴的一端与第二驱动组件连接,另一端与第二钢丝连接,第二钢丝远离第二连接母轴的一端与万向蛇骨组件连接。
10.可选地,钳头组件包括第一连接件和两个相对设置的钳颚;第一钢丝与第一连接件固定连接,两个相对设置的钳颚均与第一连接件连接;第一钢丝受第一驱动组件的驱动而旋转,带动第一连接件旋转,以使得第一连接件带动两个钳颚旋转。
11.可选地,钳头组件还包括具有容纳空间的第二连接件,第二连接件与万向蛇骨组件转动连接;其中,两个钳颚的连接部设置在第一连接件内,第一连接件设置在第二连接件的容纳空间内,两个钳颚的连接部均与第一连接件滑动连接,且与第二连接件转动连接;第一钢丝受第一驱动组件的驱动而移动,带动第一连接件移动,使得两个钳颚的连接部相对于第一连接件相对反向滑动的同时,两个钳颚的连接部均相对于第二连接件转动,以实现两个钳颚夹合部的夹合和张开。
12.可选地,第一连接件内设置有连接轴,连接轴与第一连接件固定连接,两个钳颚的连接部上均开设有滑槽,连接轴穿设于两个钳颚的滑槽内,滑槽整体呈弧形;第二连接件内设置有转动轴,两个钳颚的连接部开设有转动孔,转动轴穿设于两个钳颚的转动孔内,钳颚通过转动轴相对于转动轴转动;第一钢丝受第一驱动组件的驱动而移动,第一钢丝带动第一连接件移动,第一连接件带动连接轴在两个钳颚的滑槽内移动,使得两个钳颚的连接部相对于第一连接件相对反向滑动的同时,两个钳颚的连接部相对于转动轴转动,进而实现两个钳颚夹合和张开。
13.可选地,万向蛇骨组件包括蛇骨座、蛇骨前端及多个蛇骨;其中,蛇骨前端与钳头组件固定连接,多个蛇骨位于蛇骨座与蛇骨前端之间;第二钢丝依次穿过蛇骨座和多个蛇骨后,与蛇骨前端固定连接;蛇骨包括多个倾斜面,在两个第二传动组件的第二钢丝受第二驱动组件的驱动而沿相反方向运动时,带动多个蛇骨的受力改变,以使相邻的蛇骨的倾斜面相抵接,从而使万向蛇骨组件弯曲。
14.可选地,蛇骨前端具有容纳区域,钳头组件包括第二连接件和延伸部,第二连接件和延伸部固定连接,延伸部位于容纳区域内,延伸部与蛇骨前端转动连接,延伸部上形成有环向限位槽,蛇骨前端上设置有多个限位销钉,多个限位销钉伸入至环向限位槽内。
15.可选地,手术器械还包括可拆卸钻夹和入腹管,第一传动组件包括第一钢丝,每个第二传动组件包括第二钢丝;
可拆卸钻夹与电机模组连接,入腹管的一端与可拆卸钻夹连接,另一端与万向蛇骨组件连接;第一钢丝和第二钢丝均位于入腹管内,第一钢丝和第二钢丝沿着入腹管的长度方向延伸。
16.可选地,入腹管包括管体和五腔管,五腔管位于管体内,且五腔管沿着管体的长度方向设置,五腔管具有中间腔道和多个周向腔道,中间腔道和多个周向腔道沿着五腔管的长度方向延伸,多个周向腔道沿着中间腔道的周向分布,第一钢丝穿设于中间腔道内,第二钢丝穿设于周向腔道内。
17.可选地,第一传动组件还包括第一连接母轴,每个第二传动组件还包括第二连接母轴;第一驱动组件包括第一连接公轴,第二驱动组件包括第二连接公轴;可拆卸钻夹包括接口壳,接口壳位于可拆卸钻夹远离入腹管的一侧,第一连接母轴和第二连接母轴穿设于接口壳;电机模组包括机壳,第一驱动组件和第二驱动组件均设置在机壳内,机壳的一侧设置有接口座,第一连接公轴和第二连接公轴穿设于接口座;在接口壳与接口座连接时,第一连接公轴与第一连接母轴固定连接;第二连接公轴与对应的第二连接母轴固定连接。
18.可选地,第一连接母轴和第二连接母轴上均开设有连接槽,第一连接公轴上和第二连接公轴上设置有连接块,连接块与连接槽相适配;接口壳的四个侧壁上设置有多个卡接部;接口座的四个侧壁上设置有多个配合部,多个配合部与多个卡接部一一对应且相适配;接口壳与接口座连接时,第一连接公轴上的连接块插接至第一连接母轴的连接槽内,第二连接公轴上的连接块插接至对应的第二连接母轴的连接槽内,卡接部与对应的配合部相卡接,进而实现手术器械与电机模组的互连。
19.可选地,电机模组包括机壳、第一固定板和第二固定板,第一固定板和第二固定板设置在机壳内;第一电机、中间传动轴固定穿设于第一固定板,第一连接公轴活动穿设于第一固定板和第二固定板;第一电机上设置有第一齿轮,中间传动轴的一端设置有第二齿轮,另一端设置有第三齿轮,第一连接公轴上设置有第四齿轮;其中,第一齿轮与第二齿轮啮合,第三齿轮与第四啮合;第一电机提供的驱动力通过第一齿轮和第二齿轮传递给中间传动轴,中间轴传动轴将驱动力通过第三齿轮和第四齿轮传递给第一连接公轴,以驱动第一连接公轴旋转,使得第一连接公轴带动第一传动组件旋转。
20.可选地,电机模组包括机壳、第一固定板和第二固定板,第一固定板和第二固定板设置在机壳内;第二电机固定穿设于第一固定板;第二电机上设置有第五齿轮;钢绳传动部包括中间轴、第六齿轮、第一转向轮、第二转向轮、第三转向轮和第四转向轮;
中间轴固定穿设于第一固定板;第六齿轮和第一转向轮设置在中间轴上,第六齿轮与第五齿轮啮合;第二转向轮和第三转向轮并排设置在第一固定板上靠近第一转向轮的位置,第四转向轮设置在第二固定板上靠近第一连接公轴的位置,且第四转向轮与第二转向轮处于同一直线上;钢绳缠绕第一转向轮上,并通过第二转向轮、第三转向轮和第四转向轮转向;第二电机提供的驱动力通过第五齿轮和第六齿轮传递给中间轴,中间轴带动第一转向轮转动,使得第一转向轮缠绕钢绳,从而带动钢绳移动,钢绳带动第一固定件沿第一连接公轴的轴向移动,进而带动第一连接公轴移动,使得第一连接公轴带动第一传动组件移动。
21.可选地,电机模组包括机壳、第一固定板和第二固定板,第一固定板和第二固定板设置在机壳内;第三电机固定穿设于第一固定板;第三电机的输出轴上设置有第五转向轮;钢绳传动部包括两个子传动件,两个子传动件分别与两个第二连接公轴一一对应;子传动件包括第六转向轮和第七转向轮;第六转向轮固定设置在第一固定板上,且第六转向轮与第五转向轮位于第一固定板的同侧;第七转向轮固定设置在第二固定板上,第七转向轮与第六转向轮处于同一直线上;钢绳缠绕在第五转向轮上,并且钢绳通过两个传动件的第六转向轮和第七转向轮形成封闭环;第三电机提供的驱动力带动第五转向轮转动,使得第五转向轮缠绕钢绳,从而带动钢绳移动,使得第一钢绳段和第二钢绳段沿相反方向运动,带动第二固定件和第三固定件沿相反方向运动,进而带动两个第二连接公轴沿相反方向运动,使得两个第二传动组件沿相反方向运动。
22.可选地,接口壳内设置有至少一个磁铁安装槽;接口座内设置有识别板,识别板上设置有与磁铁安装槽对应的磁极感应芯片,磁极感应芯片用于感应磁铁安装槽内是否有磁铁或者感应磁铁安装槽内的磁铁的磁极,以确定手术器械的类型。
23.本发明实施例第二方面提供一种分体式手术装置,包括手柄机构和如本发明实施例第一方面提供的手术控制器械组件,手柄机构与手术控制器械组件的电机模组连接,控制手柄用于使电机模组提供驱动力,以带动手术控制器械的手术器械进行工作。
24.本发明实施例第三方面提供一种软组织机器人,包括机座;悬臂;及如本发明实施例第二方面提供的分体式手术装置;悬臂设置在机座上,分体式手术装置悬设于悬臂。
25.有益效果:本发明提供一种手术控制器械组件、分体式手术装置及软组织机器人,通过设置手术器械以及与手术器械连接的电极模组,其中手术器械包括第一传动组件、两个第二传动机构、万向蛇骨组件以及钳头组件,电机模组包括第一驱动组件和第二驱动组件;在使用
手术控制器械组件进行手术时,可以通过第一驱动组件驱动第一传动组件旋转,进而控制钳头组件旋转,或者通过第一驱动组件驱动第一传动组件移动,进而控制钳头组件夹合或张开;同时还可以通过第二驱动组件驱动每组第二传动机构包括两个第二传动组件沿相反方向运动,进而控制万向蛇骨组件带动钳头组件弯曲;这样便实现了钳头组件的旋转、夹合和弯曲,且利用电机模组的第一驱动组件和第二驱动组件可以更精细地控制钳头组件运动,减小了钳头组件的动作幅度,使得手术控制器械组件的操作更加精确。
附图说明
26.为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
27.图1是本发明一实施例提出的一种手术控制器械组件的结构示意图;图2是本发明一实施例提出的一种手术控制器械组件的电机模组的结构示意图;图3是本发明一实施例提出的一种第一驱动组件的结构示意图;图4是本发明一实施例提出的一种第二驱动组件的结构示意图;图5是本发明一实施例提出的第一传动组件和第二传动组件的结构示意图;图6是本发明一实施例提出的一种钳口组件和万向蛇骨组件的结构示意图;图7是本发明一实施例提出的一种万向蛇骨组件的结构示意图;图8是本发明一实施例提出的一种万向蛇骨组件弯曲时的结构示意图;图9是本发明一实施例提出的一种入腹管的横截面结构示意图;图10是本发明一实施例提出的一种电机模组的接口座的结构示意图;图11是本发明一实施例提出的一种可拆卸钻夹的接口壳的结构示意图;图12是本发明一实施例提出的一种第一连接公轴和第一连接母轴连接时的结构示意图;图13是本发明一实施例提出的一种拨档片的结构示意图;图14是本发明一实施例提出的一种识别板的结构示意图;图15是本发明一实施例提出的一种分体式手术装置的结构示意图。
28.附图标记说明:26、手柄机构;27、电机模组;272、第一固定板;273、第二固定板;274、接口座;2741、配合部;2742、识别板;2743、磁极感应芯片;28、手术器械;280、可拆卸钻夹;281、接口壳;2811、卡接部;2812、磁铁安装槽;2813、锁定开关;282、入腹管;2822、管体;283、五腔管;2831、中间腔道;2832、周向腔道;284、万向蛇骨组件;2841、蛇骨前端;2842、蛇骨座;2843、蛇骨;2844、容纳区域;2845、限位销钉;286、钳头组件;2861、钳颚;2862、夹合部;2863、连接部;2864、滑槽;2865、第一连接件;2866、第二连接件;2868、延伸部;2869、环向限位槽;50、钢绳;501、第一钢绳段;502、第二钢绳段;51、第一驱动组件;511、第一电机;5111、第一齿轮;512、第二电机;5121、第五齿轮;513、第一连接公轴;5131、第四齿轮;5132、第一固定件;514、中间传动轴;5141、第二齿轮;5142、第三齿轮;515、钢绳传动件;5151、中间轴;5152、第六齿轮;5153、第一转向轮;5154、第二转向轮;5155、第三转向轮;5156、第四转向轮;52、第二驱动组件;521、第三电机;5211、第五转向轮;5221、子传动件;5222、第六转
向轮;5223、第七转向轮;523、第二连接公轴;5231、第二固定件;5232、第三固定件;53、第一传动组件;531、第一连接母轴;532、第一钢丝;54、第二传动组件;541、第二连接母轴;542、第二钢丝;55、连接轴;56、转动轴;57、连接槽;58、连接块;59、拨档片;591、限位孔;60、限位口。
具体实施方式
29.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
30.实施例一参照图1所示,为本发明实施例公开的一种手术控制器械组件,包括手术器械28和电机模组27。
31.其中,手术器械28包括第一传动组件53、两个第二传动机构、万向蛇骨组件284及钳头组件286,第一传动组件53与钳头组件286连接,两个第二传动机构与万向蛇骨组件284连接,同时,万向蛇骨组件284与钳头组件286连接,并且每个第二传动机构包括两个第二传动组件54;利用第一传动组件53可以实现钳头组件286的旋转、夹合或张开;利用第二传动组件54可以实现万向蛇骨组件284的弯曲。
32.电机模组27包括第一驱动组件51和两个第二驱动组件52,第一驱动组件51与第一传动组件53连接,两个第二驱动组件52与两个第二传动机构一一对应,即每组第二驱动组件52分别与一个第二传动机构的两个第二传动组件54连接。
33.具体地,第一驱动组件51可以驱动第一传动组件53旋转,进而带动钳头组件286旋转。同时,第一驱动组件51可以驱动第一传动组件53移动,进而带动钳头组件286的夹合或张开。第二驱动组件52可以驱动对应的第二传动机构包括的两个第二传动组件54,沿相反方向运动,进而使万向蛇骨组件284带动牵头组件弯曲。
34.这样便实现了钳头组件286的旋转、夹合和弯曲,且利用电机模组27的第一驱动组件51和第二驱动组件52可以更精细地控制钳头组件286运动,减小了钳头组件286的动作幅度,使得手术控制器械组件的操作更加精确。
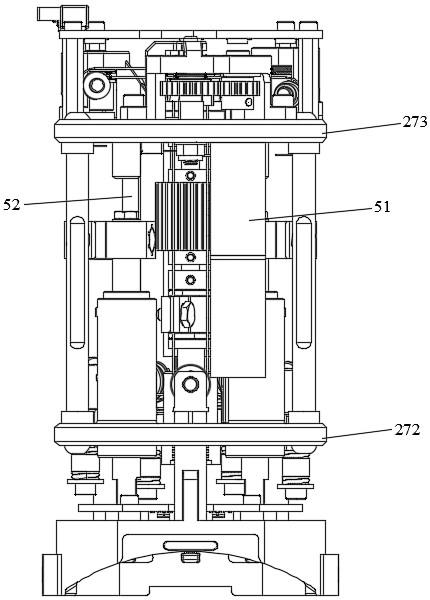
35.在一种实施例中,参照图2所示,电机模组27还包括机壳(图中未示出)、第一固定板272和第二固定板273,第一固定板272和第二固定板273均位于机壳内,第一驱动组件51和第二驱动组件52也位于机壳内,并且第一驱动组件51和第二驱动组件52与第一固定板272以及第二固定板273均具有连接关系。
36.具体地,参照图3所示,第一驱动组件51包括有第一电机511、第二电机512、第一连接公轴513、中间传动轴514和钢绳传动件515。第一连接公轴513与第一传动组件53连接,并且第一连接公轴513活动穿设于第一固定板272和第二固定板273设置。第一电机511、第二电机512、中间传动轴514固定穿设于第一固定板272上。
37.参照图3所示,第一电机511的输出轴上设置有第一齿轮5111,中间传动轴514的一端设置有第二齿轮5141,另一端设置有第三齿轮5142,第一连接公轴513上设置有第四齿轮5131。第一齿轮5111和第二齿轮5141位于第一固定板272的同侧,且第一齿轮5111和第二齿
轮5141互相啮合,第三齿轮5142和第四齿轮5131位于第一固定板272和第二固定板273之间的位置,且第三齿轮5142和第四齿轮5131互相啮合。
38.在第一电机511输出驱动力时,驱动力通过第一齿轮5111和第二齿轮5141传递给中间传动轴514,使得中间传动轴514转动,中间传动轴514带动第三齿轮5142转动,使得第三齿轮5142带动第四齿轮5131转动,从而使第四齿轮5131带动第一连接公轴513旋转,第一连接公轴513再带动第一传动组件53旋转,进而带动钳头组件286旋转。
39.并且,为了保证在控制第一连接公轴513旋转的同时,可以控制第一连接公轴513的移动,第四齿轮5131的长度大于第三齿轮5142,从而使得第三齿轮5142可以保持与第四齿轮5131啮合的状态。
40.参照图3所示,第二电机512的输出轴上设置有第五齿轮5121。钢绳传动件515包括有中间轴5151、第六齿轮5152、第一转向轮5153、第二转向轮5154、第三转向轮5155和第四转向轮5156。中间轴5151设置在第二电机512的一侧,且中间轴5151同样固定穿设于第一固定板272设置,第六齿轮5152设置在中间轴5151上,且第五齿轮5121与第六齿轮5152互相啮合。
41.第一转向轮5153也设置在中间轴5151上,第二转向轮5154和第三转向轮5155通过安装轴固定在第一固定板272上,第二转向轮5154和第三转向轮5155位于第一转向轮5153的一侧,并且第二转向轮5154和第三转向轮5155并排设置。第四转向轮5156通过安装轴固定在第二固定板273上,并且第四转向轮5156与第二转向轮5154处于同一直线上,该直线与第一连接公轴513的轴线平行。
42.参照图3所示,钢绳传动件515上缠绕有钢绳50。具体地,钢绳50缠绕在第一转向轮5153上,然后依次穿过第二转向轮5154、第四转向轮5156和第三转向轮5155进行转向后,再与第一转向轮5153缠绕。同时,在第一连接公轴513上设置有第一固定件5132,第一固定件5132与钢绳50的连接段固定连接。在本实施例中,第一固定件5132为夹片状,钢绳50的连接段指的是被夹片状的第一固定件5132夹住的位置,且钢绳50的连接段位于第二转向轮5154和第四转向轮5156之间。
43.在第二电机512输出驱动力后,驱动力通过第五齿轮5121和第六齿轮5152传递给中间轴5151,使中间轴5151转动,中间轴5151带动第一转向轮5153转动,使得第一转向轮5153缠绕钢绳50,从而带动钢绳50在第二转向轮5154、第三转向轮5155和第四转向轮5156上移动,而钢绳50的连接段位于第二转向轮5154和第四转向轮5156之间,因此钢绳50的连接段的移动是沿第一连接公轴513轴线方向的移动,钢绳50的连接段再带动第一固定件5132沿第一连接公轴513的轴线移动,从而带动第一连接公轴513移动,使得第一连接公轴513带动第一传动组件53移动,进而使得钳头组件286夹合或张开。
44.参照图4所示,第二驱动组件52包括第三电机521、钢绳传动部和两个第二连接公轴523。第三电机521固定穿设于第一固定板272,第二连接公轴523活动穿设于第二固定板273,且每个第二连接公轴523与对应的第二传动组件54连接。
45.第三电机521的输出轴上设置有第五转向轮5211,第五转向轮5211与第一转向轮5153位于第一固定板272的同侧。同时在两个第二连接公轴523上各自设置有第二固定件5231和第三固定件5232。
46.参照图4所示,钢绳传动部包括两个子传动件5221,两个子传动件5221分别与两个
第二连接公轴523一一对应。子传动件5221包括第六转向轮5222和第七转向轮5223,第六转向轮5222通过安装轴固定设置在第一固定板272上,且第六转向轮5222与第五转向轮5211位于第一固定板272的同侧,第七转向轮5223通过安装轴固定在第二固定板273上,第六转向轮5222和第七转向轮5223处于同一直线上,该直线与第二连接公轴523的轴线平行。
47.参照图4所示,钢绳传动部上缠绕有钢绳50,钢绳50缠绕在第五转向轮5211上,然后依次穿过两个子传动件5221的第六转向轮5222和第七转向轮5223,形成一个封闭环。并且,位于一个子传动件5221的第六转向轮5222和第七转向轮5223之间的钢绳50为第一钢绳段501,位于另一个子传动件5221的第六转向轮5222和第七转向轮5223之间的钢绳50为第二钢绳段502,第一钢绳段501与第二固定件5231固定连接,第二钢绳段502与第三固定件5232固定连接。
48.在第三电机521输出驱动力时,驱动力使得第五转向轮5211转动,第五转向轮5211缠绕钢绳50,从而带动钢绳50移动,此时由于钢绳50缠绕到第五转向轮5211上,因此第一钢绳段501和第二钢绳段502是沿相反方向运动的,进而使得第二固定件5231和第三固定件5232沿相反方向运动,第二固定件5231和第三固定件5232再带动两个第二连接公轴523沿相反方向运动,使得与两个第二连接公轴523对应的两个第二传动组件54沿相反方向运动,进而控制万向蛇骨组件284带动钳头组件286弯曲。
49.这样,利用第一驱动组件51和第二驱动组件52便实现了第一传动组件53和第二传动组件54的不同运动。
50.在一种实施例中,参照图1所示,手术器械28还包括可拆卸钻夹280和入腹管282,其中,可拆卸钻夹280与电机模组27的机壳连接,入腹管282的一端与可拆卸组件连接,另一端与万向蛇骨组件284连接。
51.参照图5所示,第一传动组件53包括第一钢丝532和第一连接母轴531,第一连接母轴531穿设于可拆卸钻夹280内,第一连接母轴531的一端与第一驱动组件51的第一连接公轴513连接,另一端与第一钢丝532连接,第一钢丝532沿着入腹管282的长度方向穿设于入腹管282内,第一钢丝532远离第一连接母轴531的一端与钳头组件286连接。
52.参照图6所示,钳头组件286包括第一连接件2865、第二连接件2866和两个相对设置的钳颚2861,第一钢丝532远离第一连接母轴531的一端与第一连接件2865固定连接,第二连接件2866与万向蛇骨组件284转动连接,并且第二连接件2866具有容纳空间,第一连接件2865位于第二连接件2866的容纳空间内,钳颚2861具有连接部2863和夹合部2862,钳颚2861的连接部2863第一连接件2865之间滑动连接,同时与第二连接件2866转动连接。
53.在第一连接母轴531受第一驱动组件51的第一连接公轴513驱动而旋转时,第一钢丝532跟随第一连接母轴531旋转,第一钢丝532再带动第一连接件2865旋转,第一连接件2865再带动两个钳颚2861和第二连接件2866旋转,从而实现了钳头组件286的旋转运动。
54.具体地,在本实施例中,第一连接件2865和第二连接件2866均为u形夹状。
55.参照图6所示,第一连接件2865内设置有连接轴55,连接轴55与第一连接件2865固定连接,钳颚2861的连接部2863上开设有弧形的滑槽2864,且两个钳颚2861上的滑槽2864方向是相反的,连接轴55则同时穿过两个钳颚2861的滑槽2864。
56.同时,在第二连接件2866内设置有转动轴56,转动轴56与第二连接件2866固定连接,钳颚2861的连接部2863上开设有转动孔,转动轴56则穿过两个钳颚2861的转动孔,使得
钳颚2861可以相对于转动轴56转动。
57.在第一连接母轴531受第一驱动组件51的第一连接公轴513驱动而移动时,第一连接母轴531带动第一钢丝532移动,第一钢丝532带动第一连接件2865移动,此时,由于转动轴56的限制,两个钳颚2861不能在入腹管282的轴线方向上移动,因此,连接轴55会同时在两个钳颚2861的滑槽2864内的滑动,又由于钳颚2861可以相对于转动轴56转动,且两个钳颚2861的滑槽2864是相反的弧形,所以在连接轴55的移动作用下,两个钳颚2861的连接部2863会相对于转动轴56反向转动,进而使两个钳颚2861的夹合部2862相对运动,进而实现两个钳颚2861的夹合和张开。
58.在一种实施例中,参照图5所示,每个第二连接组件均包括第二钢丝542和第二连接母轴541,第二连接母轴541穿设于可拆卸钻夹280内,第二连接母轴541的一端与第二驱动组件52中对应的第二连接公轴523连接,另一端与第二钢丝542连接;第二钢丝542沿着入腹管282的长度方向穿设于入腹管282内,且第二钢丝542远离第二连接母轴541的一端与万向蛇骨组件284连接。在本实施例中,第二传动机构共有两个,每个第二传动机构又包括两个第二传动组件54,因此一共包括有四个第二连接母轴541和四个第二钢丝542。
59.具体地,参照图7所示,万向蛇骨组件284包括蛇骨座2842、蛇骨前端2841和多个蛇骨2843。蛇骨座2842与入腹管282远离可拆卸钻夹280的一端固定连接,蛇骨前端2841与钳头组件286的第二连接件2866转动连接,多个蛇骨2843位于蛇骨座2842与蛇骨前端2841之间,每个第二钢丝542依次穿过蛇骨座2842和多个蛇骨2843后与蛇骨前端2841固定连接。
60.多个蛇骨2843依次叠加在蛇骨座2842与蛇骨前端2841之间,蛇骨2843上具有多个倾斜面,并且相邻两个蛇骨2843之间可以相对转动。
61.参照图8所示,在入腹管282的横截面上,处于第一对角线的两根第二钢丝542为一组,用于控制万向蛇骨组件284在第一平面方向的弯曲,处于第二对角线的两根第二钢丝542为另一组,用于控制万向蛇骨组件284在第二平面方向的弯曲,第一平面和第二平面之间为垂直关系。
62.在处于任一对角线两个第二连接母轴541受第二驱动组件52的驱动而沿相反方向运动时,两个第二连接母轴541会带动对应的两个第二钢丝542沿相反方向移动,此时,两个第二钢丝542会带动多个蛇骨2843的受力改变,从而使相邻的蛇骨2843的倾斜面相抵接,使得万向蛇骨组件284弯曲,并带动钳头组件286弯曲。
63.这样,便实现了钳头组件286的弯曲运动。
64.参照图6和图7所示,蛇骨前端2841具有容纳区域2844,连接件包括有延伸部2868,延伸部2868位于容纳区域2844内,延伸部2868与蛇骨前端2841转动连接,延伸部2868上形成有环向限位槽2869,蛇骨前端2841上设置有多个限位销钉2845,多个限位销钉2845伸入至环向限位槽2869内。
65.具体地,限位销钉2845伸入环向限位槽2869内后,可以限制延伸部2868沿入腹管282的轴线方向移动,从而在第一钢丝532带动第一连接件2865移动时,限制第二连接件2866通过两个钳颚2861跟随第一连接件2865移动;但是,由于延伸部2868与蛇骨前端2841转动连接,且限位销钉2845并不会限制第二连接件2866的转动,因此在第一钢丝532带动第一连接件2865旋转时,第一连接件2865会通过两个钳颚2861带动第二连接件2866一起旋转。
66.参照图8所示,入腹管282包括管体2822和五腔管283,五腔管283沿着管体2822的长度方向设置在管体2822内,五腔管283具有中间腔道2831和多个周向腔道2832,中间腔道2831和周向腔道2832沿着五腔管283的长度方向延伸,多个周向腔道2832沿着中间腔道2831的周向均匀分布,其中第一钢丝532穿设于中间腔道2831内,多个第二钢丝542分别穿设于不同的周向腔道2832内。利用五腔管283可以避免第一钢丝532和第二钢丝542的互相缠绕。
67.在一种实施例中,参照图10和图11所示,可拆卸钻夹280包括接口壳281,接口壳281位于可拆卸钻夹280远离入腹管282的一侧,第一连接母轴531和第二连接母轴541均穿设于接口壳281。电机模组27的机壳的一侧设置有接口座274,第一连接公轴513和第二连接公轴523穿设于接口座274,接口壳281和接口座274相适配。
68.通过接口壳281和接口座274可以将手术器械28和电机模组27连接到一起,并且在接口壳281与接口座274连接时,第一连接公轴513与第一连接母轴531固定连接,第二连接公轴523与对应的第二连接母轴541固定连接,使得第一连接公轴513可以带动第一连接母轴531运动,第二连接公轴523可以带动对应的第二连接母轴541运动。
69.参照图11和图12所示,在第一连接母轴531和第二连接母轴541上均开设有连接槽57;参照图10和图12所示,在第一连接公轴513和第二连接公轴523设置有连接块58,连接块58与连接槽57相适配。
70.具体地,参照图12所示,以第一连接母轴531上的连接槽57为例,连接槽57位于第一连接母轴531的端部上,连接槽57是从第一连接母轴531的侧壁开设,然后贯通第一连接母轴531的端部,且连接槽57在第一连接母轴531侧壁的开口大小大于连接槽57在第一连接母轴531端部的开口大小。连接槽57在第二连接母轴541上的形状与连接槽57在第一连接母轴531上的形状相同。
71.以第一连接公轴513为例,连接块58位于第一连接公轴513的端部上,且连接块58与第一连接公轴513连接处形成环形凹槽。同样地,连接块58与第二连接公轴523的连接处也形成环形凹槽。
72.这样,在连接接口壳281和接口座274时,将接口壳281从侧向(即垂直于入腹管282轴线的方向)朝向接口座274移动,使得第一连接公轴513和第二连接公轴523上的连接块58从第一连接母轴531和第二连接母轴541的侧壁进入连接槽57,而第一连接公轴513和第二连接公轴523上的环形凹槽与第一连接母轴531和第二连接母轴541的端部对应,直至连接块58完全插入连接槽57内,此时,由于连接块58和连接槽57的形状配合,第一连接公轴513和第一连接母轴531、第二连接公轴523和第二连接母轴541在轴线方向上为固定连接,使得第一连接公轴513可以带动第一连接母轴531运动,第二连接公轴523可以带动对应的第二连接母轴541运动。
73.参照图13所示,为了更好地使第一连接公轴513和第二连接公轴523与第一连接母轴531和第二连接母轴541连接,在接口壳281内还设置有拨档片59,拨档片59上开设有多个限位孔591,第一连接母轴531和第二连接母轴541分别从不同的限位孔591穿过;在第一连接母轴531和第二连接母轴541上开设有限位口60,限位口60位于第一连接母轴531和第二连接母轴541的同一侧,拨档片59可以在接口壳281内朝向第一连接母轴531和第二连接母
轴541上的限位口60的方向滑动。在拨档片朝向第一连接母轴531和第二连接母轴541上的限位口60的方向滑动时,拨档片59的限位孔591边缘会卡入限位口60内,此时拨档片59便可以限制第一连接母轴531和第二连接母轴541在轴线方向的运动,从而保证第一连接公轴513和第二连接公轴523的连接块58可以准确卡入第一连接母轴531和第二连接母轴541的连接槽57内。同时在不使用手术器械28时,也可以利用拨档片59卡住第一连接母轴531和第二连接母轴541,以免出现误操作;而在使用手术器械28时,则再次滑动拨档片59,使限位孔591的边缘脱离限位口60即可。
74.参照图11所示,在接口壳281的四个侧壁上设置有多个卡接部2811,接口座274的侧壁上设置有多个配合部2741,多个卡接部2811与多个配合部2741一一对应且互相适配。
75.具体地,参照图10所示,卡接部2811包括设置在接口壳281上侧壁的限位槽、设置在接口壳281下侧壁的限位凸台以及设置在接口壳281左侧壁和右侧壁的插接凸台;配合部2741包括设置在接口座274上侧壁的限位凸台、设置在接口座274下侧壁的限位槽以及设置接口座274左侧壁和右侧壁的插接槽口。
76.在连接接口壳281和接口座274时,将接口壳281从侧向(即垂直于入腹管282轴线的方向)朝向接口座274移动,使得接口壳281下侧壁的限位凸台插接至接口座274下侧壁的限位槽内,接口壳281左侧壁和右侧壁的插接凸台插接至接口座274左侧壁和右侧壁的插接槽口内,接口壳281上侧壁的限位槽卡入接口座274上侧壁的限位凸台内,这样,便可以利用卡接部2811和配合部2741实现接口壳281和接口座274的在入腹管282轴线方向上的固定连接,进而实现手术器械28与电机模组27的互连。
77.参照图11和图13所示,在接口壳281的下侧壁上还设有锁定开关2813,锁定开关2813可以在接口壳281上滑动,在接口壳281与接口座274连接后,朝向接口座274的方向滑动锁定开关2813,使锁定开关2813的锁舌卡接到接口座274的下侧壁的外侧,此时,锁定开关2813便可以限制接口壳281和接口座274在侧向方向的位移,从而进一步固定接口壳281和接口座274。
78.在一种实施例中,在手术控制器械组件的使用过程中,一般要用到多种手术器械28,由于不同手术器械28有不同的开合角度,因此电机模组27需要识别不同手术器械28的种类。
79.具体地,参照图11所示,在接口壳281内设置有至少一个磁铁安装槽2812,磁铁安装槽2812内可以选择安装或者不安装磁铁,在安装磁铁时又可以选择磁铁的n极或s极的朝向。
80.参照图14所示,同时在接口座274内设置有识别板2742,识别板2742上设置有与磁铁安装槽2812数量和位置相对应的磁极感应芯片2743,磁极感应芯片2743可以感应磁铁安装槽2812内是否有磁铁,或者感应磁铁安装槽2812内磁铁的磁极,从而根据感应结果来确定手术器械28的类型。
81.在本实施例中,磁铁安装槽2812共设置有三个,三个磁铁安装槽2812呈三角形分布,而在识别板2742上对应的位置设置有三个磁极感应芯片2743,每个磁极感应芯片2743可以感应到的信号分别为0、n、s,其中0表示磁铁安装槽2812内未安装有磁铁,n表示磁铁安装槽2812内安装的磁铁的磁极为n极,s表示磁铁安装槽2812内安装的磁铁的磁极为s极。
82.在识别手术器械28时,例如,一种手术器械28上的三个磁铁安装槽2812内,有一个
未安装磁铁,另外两个安装的磁铁的磁极为n极,则磁极感应芯片2743感应到的信号为(0,n,n),而电机模组27根据识别到信号判断出该手术器械28的类型。
83.这样,便可以根据感应磁极芯片感应的信号,判断手术器械28的种类,从而进行相对应的运动控制限制。
84.在一种实施例中,电机模组27的支撑构件,如机壳、第一固定板272和第二固定板273以及接口座274可以采用特种工程塑料,例如peek (聚醚醚酮)材料;电机模组27的运动构件,如第一驱动组件51和第二驱动组件52可以采用航空材料,例如7075铝合金材料,如此可以减低电机模组27的重量,并且电机模组27采用集成式设计,布局更加紧凑,更易于手持设备便携及机械臂控制,并降低驱动功耗。
85.实施例二本发明实施例提供一种分体式手术装置,包括手柄机构26和如本发明实施例一提供的手术控制器械组件。
86.参照图15所示,手柄机构26与手术控制器械组件的电机模组27连接,控制手柄用于使电机模组27提供驱动力,以带动手术控制器械组件的手术器械28进行工作。
87.利用电极模组的第一驱动组件51和第二驱动组件52带动第一传动组件53和第二传动组件54的运动,实现了钳头组件286的旋转、夹合和弯曲,且利用电机模组27的第一驱动组件51和第二驱动组件52可以更精细地控制钳头组件286运动,减小了钳头组件286的动作幅度,使得手术控制器械组件的操作更加精确。
88.实施例三本发明实施例公开一种软组织机器人,包括机座、悬臂和如本发明实施例二提供的分体式手术装置。
89.具体地,悬臂设置在机座上,分体式手术装置悬设于悬臂上。
90.需要说明的是,本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。
91.还需要说明的是,在本文中,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,诸如“第一”和“第二”之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序,也不能理解为指示或暗示相对重要性。
92.以上对本发明所提供的技术方案进行了详细介绍,本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明,本说明书内容不应理解为对本发明的限制。同时,对于本领域的一般技术人员,依据本发明,在具体实施方式及应用范围上均会有不同形式的改变之处,这里无需也无法对所有的实施方式予以穷举,而由此所引伸出的显而易见的变化或变动仍处于本发明的保护范围之中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1