一种双平面超声探头的标定系统及标定方法
1.本发明涉及一种正交双平面超声探头的标定系统与标定方法,属于医疗器械、计算机视觉技术领域。
背景技术:
2.前列腺穿刺活检术,是前列腺癌诊断的金标准。超声图像因其采集的便利性、图像的实时性,常被用于引导前列腺穿刺手术。目前,临床上用到术前mr、术中超声融合的前列腺穿刺活检系统,需要获取二维超声图像的空间位置信息。通过在超声探头上固定电磁定位传感器,可以实时获取传感器的空间位姿信息。另外需要将超声探头进行标定,从而获得传感器坐标系到超声图像坐标系的转换关系,进而获得超声图像的空间位置信息。
3.目前,常见的超声图像标定方法,通过在水箱中令超声图像扫描n线体膜,形成若干个亮点,识别并计算亮点的空间位置信息,并结合其在超声图像中的像素坐标信息,从而计算标定矩阵。
4.现有的技术,超声标定仿体主要为单平面超声探头设计。对于双平面超声探头,由于其两个成像平面相互正交、视野有限,且无法全部浸没于水箱当中,因此难以找到合适的角度与位置使之能够扫描到n线仿体的全部点。由于超声图像成像质量较差,有反射、伪影等问题,且在超声截面与n线不完全垂直时亮斑面积过大,因此特征点识别精度较差。以上原因导致标定图像采集困难,以及计算得到的标定矩阵精度较低。
技术实现要素:
5.针对上述问题,本发明的目的是提供一种方便易用的双平面超声探头标定系统,以及一种鲁棒、高精度的标定方法。
6.为实现上述目的,本发明采取以下技术方案:一种双平面超声探头标定系统,包括正交双平面超声探头,其具有两个超声成像截面,且两个截面相互正交;磁场发生器,用于产生用于电磁定位的磁场;磁导航定位接收器,其刚体固定于双平面超声探头上,在磁场发生器所产生的磁场当中,能够实时地获取自身的空间位置与姿态参数,从而标定后可用于获取两个超声截面的空间位姿参数;磁导航定位探针,在磁场发生器产生的磁场中,可以实时地获取针尖的空间位置参数,用于定位标定仿体;标定仿体,为一个长方体;容器及固定装置,用于盛放超声成像介质。
7.进一步地,所述标定仿体,使用树脂材质制成,整体为长方体,分为上下两个区域,各有一个方形孔洞,孔洞侧壁设有若干倒三角形通孔,穿插有尼龙线。
8.进一步地,所述标定仿体,上下两个区域的孔洞,均在侧壁打孔,穿插线,形成5 组n形。且对于仿体的上下两个区域,分别由尼龙线穿插而成的各5组n形线其形状、大小相同,相互垂直。上半区域用于采集超声探头矢状面标定所需的数据,下半区域用于采集超声探头横断面标定所需的数据。
9.进一步地,所述标定仿体,三角形通孔间所穿的线为尼龙材质,且直径与超声探头
所采用的超声波长相近,从而使得超声图像中,与尼龙线的交点更为清晰。
10.进一步地,所述容器及固定装置,容器高度足够盛放标定仿体及固定装置。固定装置可以将标定仿体固定于容器底部。容器可用于盛放人体温温度的热水并浸没标定仿体。容器四壁设有吸波材料用于减少超声反射。
11.一种基于双平面超声探头标定系统的标定方法,包括以下步骤:
12.步骤(1)标定数据采集:使用上述双平面超声探头标定系统,采集标定所需的原始数据;
13.步骤(2)标定数据标注:自动或非自动地,对于超声截面与标定仿体n形线相交形成的若干个点,自动或非自动地,根据特定几何关系,识别并标注其在图像中的坐标;
14.步骤(3)标定数据预处理:根据超声截面与标定仿体n形线相交形成的若干个点,其距离几何关系,计算与各组n线斜边相交而成的若干个特征点,在仿体坐标系下的坐标;
15.步骤(4)最小二乘法迭代优化,去除离群点并计算标定矩阵:计算从磁导航接收器坐标系到超声图像坐标系之间的坐标变换矩阵;
16.步骤(5)双平面标定矩阵求平均:根据超声探头两个成像平面相互正交的先验信息,对两个探头分别求得的标定矩阵求平均;
17.进一步地,所述步骤(1)的具体过程为:
18.步骤(1.1)将标定仿体竖直固定于容器内,令成像介质浸没仿体;
19.步骤(1.2)以磁场发生器为基准,建立磁场发生器坐标系;
20.步骤(1.3)使用针型探头,采集仿体定位数据,分别包括长方体标定仿体右表面、上表面、正面的若干个点的坐标;
21.步骤(1.4)确保磁导航定位接收器固定于超声探头中部;
22.步骤(1.5)采集横断面标定数据:令超声横断面与标定仿体下半部分的n线相交。
23.在保证超声图像与所有n形线相交且交点清晰可见的前提下,分别调整超声探头3个平移自由度,3个旋转自由度,采集若干张图像;
24.步骤(1.6)采集矢状面标定数据:令超声矢状面与标定仿体上半部分的n线相交。
25.在保证超声图像与所有n形线相交且交点清晰可见的前提下,分别调整超声探头3个平移自由度,3个旋转自由度,采集若干张图像;
26.进一步地,所述步骤(2)的具体过程为,考虑对于单帧图像中的前景点,有点abc 共线,def共线、ghi共线、jkl共线、mno共线,adg共线、beh共线、cfi共线,且有ac∥df∥gi,以及ag∥bh∥ci,则标注时可以排除其他不符合上述规则的噪声点的干扰,按照共线及平行规则,更准确地识别前景点
27.进一步地,所述步骤(4)的具体过程为:
28.步骤(4.1)、以磁场发射器为基准建立磁场发生器坐标系t(transmitter),以标定仿体为基准建立仿体重建坐标系c(reconstruction)如图2所示,以磁导航定位接收器为基准建立接收器坐标系r(receiver),以横断面、矢状面超声图像为基准建立图像坐标系 i(image),则对于任一特征点,有坐标变换:pc=t
ct
*t
tr
*t
ri
*pi;
29.步骤(4.2)、已知标定仿体的参数信息,使用已经采集到的长方体仿体的右表面、上表面、正面各30个点的磁场发生器坐标系坐标,计算发射器(transmitter)坐标系到仿体重建坐标系(reconstruction)的转换矩阵tct;
30.步骤(4.3)、以5点共面为依据,筛除离群点。对于上述标定图片当中的5个特征点,应属于同一平面。使用这5点的磁场发生器坐标系坐标拟合平面。若计算得到其中任意一点与平面的距离大于特定阈值,则丢弃该帧图片数据;
31.步骤(4.4)、使用迭代最小二乘拟合从图像(image)坐标系到传感器/接收器(receiver) 坐标系的转换矩阵tri;
32.步骤(4.5)、使用上述第6步求得的标定矩阵t
ri
,对现有关键点进行坐标变换,重建其仿体坐标系坐标;
33.步骤(4.6)、对于计算得到的仿体坐标系坐标,与真实值相差较大的点,作为离群点筛除;
34.步骤(4.7)、重复(4.4)~(4.6),直至没有离群点被筛除,得到该横断面或矢状面的标定矩阵t
ri
。
35.进一步地,所述步骤(5)的具体过程为
36.步骤(5.1)、对于横断面、矢状面,其标定矩阵形式上均为4*4矩阵步骤(5.1)、对于横断面、矢状面,其标定矩阵形式上均为4*4矩阵其中其物理意义分别是超声探头轴线方向、正上方、正右方在接收器坐标系下的方向向量;
37.步骤(5.2)、令构造新的横断面、矢状面标定矩阵
38.本发明由于采取以上技术方案,其具有以下优点:
39.1.本发明中的标定仿体设计标准化,制作成本低,且侧壁倒三角形孔的设计保证了穿插尼龙线坐标的精确性;
40.2.本发明中的标定仿体,其n形线分为上下两个区域且互相垂直,适用于双平面标定仿体横断面、矢状面相互垂直的情况。固定好标定仿体后,将超声探头竖直插入成像介质中,可使用标定仿体的上下两个区域的n形线,分别采集两个平面所需的标定图像,超声成像平面与n形线大致垂直,则图像中的特征点更清晰,更易识别;
41.3.本发明提出的标定图像采集流程,系统地规定了图像采集过程中探头的移动方式,分别调整3个平移自由度和3个旋转自由度,从而采集到大量不同位姿下的超声数据,有利于标定矩阵求解的准确性;
42.4.本发明提出的标定仿体定位方法,通过使用多点坐标分别最小二乘拟合长方形仿体3 个平面的方式,避免了人工定位特定点的操作难度,且提高了仿体位置计算的稳定性;
43.5.本发明规定的标定仿体5组n形线穿线方式,提供了n形线垂直的先验信息,有助于标定图像人工标注时识别关键点;
44.6.本发明提出的标定图像预处理方式,通过筛除离群点,提高了标定矩阵的计算精度;
45.7.本发明提出的双平面垂直校准后处理,通过引入超声探头双平面垂直的信息,
降低了标定矩阵的计算误差。
附图说明
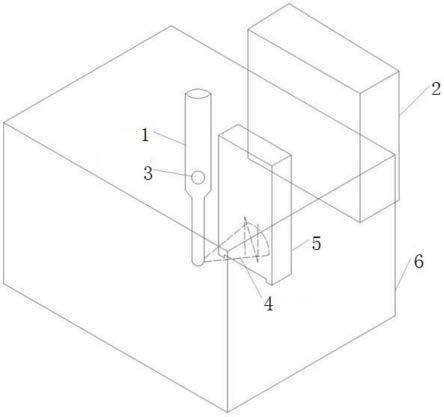
46.图1为本发明所描述的标定系统所有硬件放置位置示意图;
47.图2为使用标定仿体下半部分n形线,采集超声探头横断面标定数据(左图);使用标定仿体桑半部分n形线,采集超声探头矢状面标定数据(右图)
48.图3为标定过程所涉及的几个坐标系的示意图;
49.图4为本发明所描述的标定仿体的立体视图,不包括其中穿插的丝线组;
50.图5为本发明所描述的标定仿体主视图;
51.图6为本发明所描述的标定仿体右视图;
52.图7为仿体中穿插所有丝线组的示意图;
53.图8为仿体中穿插的一组n形线示意图;
54.图9为采集到的单帧矢状面标定图像示例;
55.图10为标定全过程的流程图。
56.图中:1、正交双平面超声探头,2、磁场发生器,3、磁导航定位接收器,4、超声扫描截面,5、标定仿体,6、容器。
具体实施方式
57.以下结合附图来对本发明进行详细的描绘。然而,附图的提供仅为了更好地理解本发明,它们不应被理解成对本发明的限制。
58.实施例1:参见图1、4、5、6、7,一种双平面超声探头标定系统,包括正交双平面超声探头1,其具有两个超声成像截面4,且两个截面相互正交;磁场发生器2,用于产生用于电磁定位的磁场;磁导航定位接收器3,其刚体固定于双平面超声探头上,在磁场发生器所产生的磁场当中,能够实时地获取自身的空间位置与姿态参数,从而标定后可用于获取两个超声截面的空间位姿参数;磁导航定位探针,在磁场发生器产生的磁场中,可以实时地获取针尖的空间位置参数,用于定位标定仿体;标定仿体5,为一个长方体;容器6及固定装置,用于盛放超声成像介质。
59.所述标定仿体5,使用树脂材质制成,如图4、5、6、7所示,整体为长方体,分为上下两个区域,各有一个方形孔洞,孔洞侧壁设有若干倒三角形通孔,可用于穿插丝线。
60.所述标定仿体5,如图7所示,上下两个区域的孔洞,均在侧壁打孔,穿插线,形成5组n形线。且对于仿体的上下两个区域分别由尼龙线穿插而成的各5组n形线其形状、大小相同,相互垂直。
61.所述标定仿体5,如图7所示,尼龙线穿插形成5组n形线,其中3组n形线相互平行,即图7中c、d、e 3组n形线;另外2组n形线与前述n形线的斜边方向相反,即图7中a、b 2组n形线。如图7所示,由内向外,共a、b、c、d、e 5组n形线。
62.所述标定仿体5,三角形通孔间所穿的线为尼龙材质,且直径与超声探头所采用的超声波长相近。
63.所述容器6及固定装置,容器高度足够盛放标定仿体及固定装置。固定装置可以将标定仿体固定于容器底部。容器可用于盛放人体温温度的热水并浸没标定仿体。容器四壁
设有吸波材料,用于减少超声反射。
64.实施例2:参见图2、3、8、9、10,基于上述双平面超声探头标定系统,本发明还提供一种基于双平面超声探头标定系统的标定方法,包括以下步骤:
65.(1)标定数据采集:使用上述双平面超声探头标定系统,采集标定所需的原始数据,具体如下,
66.(1.1)将标定仿体竖直固定于容器内,令清水浸没仿体。加热水,使之达到人体温 37℃;
67.(1.2)以磁场发生器为基准,建立磁场发生器坐标系;
68.(1.3)使用针形探头,采集仿体定位数据。即,任意地采集长方体仿体右表面、上表面、正面各30个点的磁场发生器坐标系坐标;
69.(1.4)将磁导航定位接收器固定于超声探头中部;
70.(1.5)采集横断面标定数据,如图2(左)所示;
71.(1.5.1)将超声探头竖直插入水中,前半段浸没于水中。调整超声探头位置,从而其横断面视野与仿体下半部分5组n线相交,横断面成像上能够清晰地看到与5组n线对应的共15个亮点;
72.(1.5.2)以0.3s每帧的频率采集共360张图像,同时采集磁导航定位接收器的位姿数据。期间,分别在标定仿体坐标系的x、y、n方向平移超声探头,以超声探头轴线方向为轴旋转超声探头、超声探头成像平面朝向仿体,俯仰超声探头、超声探头成像平面朝向仿体,左右旋转超声探头,并且保证15个亮点清晰可见;
73.(1.6)采集矢状面标定数据,如图2(右)所示:
74.(1.6.1)将超声探头竖直插入水中,前半段浸没于水中。调整超声探头位置,从而其矢状面视野与仿体下上半部分5组n线相交,横断面成像上能够清晰地看到与5组n 线对应的共15个亮点;
75.(1.6.2)以0.3s每帧的频率采集共360张图像,同时采集磁导航定位接收器的位姿数据。期间,分别在标定仿体坐标系的x、y、n方向平移超声探头,以超声探头轴线方向为轴旋转超声探头、超声探头成像平面朝向仿体,俯仰超声探头、超声探头成像平面朝向仿体,左右旋转超声探头,并且保证15个亮点清晰可见;
76.(2)标定数据标注:在标定数据采集完成后,需对图像进行人工标注。如图9所示,以横断面超声截面标定图像为例,超声截面与5组n线相交形成a~o共15个亮点,人工标注这15个点在图像坐标系中的像素坐标。进一步的,按照图7规定的5组n线穿插方式,则对于图9所示的矢状面标注数据中的前景点,有点abc共线,def共线、 ghi共线、jkl共线、mno共线,adg共线、beh共线、cfi共线,且有ac∥df∥gi,以及ag∥bh∥ci。人工标注时,可以排除其他不符合上述规则的噪声点的干扰,按照共线及平行规则,更准确地识别前景点;
77.(3)标定数据预处理:对于超声截面与5组n线相交而成的15个点,计算其中与每组n线斜边相交而形成的5个点,在标定仿体坐标系下的坐标。如图6所示,以一组 n线为例,共包括3条边,ac、eg、ik,其中,点a、c、e、g、i、k分别是n线与标定仿体内壁的交点。标定图像采集过程中,超声截面bfj与这组n线相交于b、f、j三个点。另外的,边ac、eg延长线相交于点d,边eg、ik延长线相交于点h,则有
△
bdf~
△
jhf,因此,有在标定仿体形状已知的
前提下,容易计算点d,h 坐标。则有
78.(4)最小二乘法迭代优化,去除离群点并计算标定矩阵:计算从磁导航接收器坐标系到超声图像坐标系之间的坐标变换矩阵;
79.(4.1)以磁场发射器为基准建立磁场发生器坐标系t(transmitter),以标定仿体为基准建立仿体重建坐标系c(reconstruction)如图3所示,以磁导航定位接收器为基准建立接收器坐标系r(receiver),以横断面、矢状面超声图像为基准建立超声图像坐标系 i(image),则对于任一特征点,有坐标变换:pc=t
ct
*t
tr
*t
ri
*pi;
80.(4.2)已知标定仿体的参数信息,使用已经采集到的长方体仿体的右表面、上表面、正面各30个点的磁场发生器坐标系坐标,计算发射器(transmitter)坐标系到仿体重建坐标系(reconstruction)的转换矩阵t
ct
;
81.(4.2.1)分别对于仿体右表面、上表面、正面的各30个点,最小二乘法拟合平面方程a*x+b*y+c*n-1=0,对于3个平面分别计算出3组平面参数a1、b1、c1、 a2、b2、c2、a3、b3、c3;
82.(4.2.2)使用3组平面参数,联例计算长方体标定仿体正面右上角点的磁场发生器坐标系坐标;
83.(4.2.3)使用3组平面参数,分别计算长方体标定仿体其x、y、z轴正方向的磁场发生器坐标系坐标;
84.(4.2.4)使用2.2、2.3所示的1个点坐标和3个方向向量,共4个齐次坐标,最小二乘法拟合,计算磁场发生器t坐标系到仿体重建坐标系c的转换矩阵tct;
85.(4.3)以5点共面为依据,筛除离群点。对于上述每张图片当中的5个点,应属于同一平面。使用5点坐标拟合平面:
86.(4.3.1)对于每张标定图像计算出的5个n线斜边交点的磁场发生器坐标系坐标,拟合平面;
87.(4.3.2)分别计算5个点与平面的距离;
88.(4.3.3)如果任意一点与平面的距离大于特定阈值,则抛弃该帧标定图像的所有数据,不再参与计算;
89.(4.4)使用迭代最小二乘拟合从图像(image)坐标系到传感器/接收器(receiver)坐标系的转换矩阵t
ri
:
90.(4.4.1)对于标定数据预处理步骤当中,标注出的所有特征点,由其仿体重建坐标系坐标计算其磁场发生器坐标系坐标p
t
=inverse(t
ct
)*pc;
91.(4.4.2)对于上述步骤中的各磁场发生器坐标系坐标,计算其接收器坐标系坐标 pr=inverse(t
tr
)*p
t
,其中,t
tr
为磁导航定位接收器到发射器之间的转换矩阵,由磁导航定位设备获取;
92.(4.4.3)任意选择一组6个参数构造初始的刚体变换矩阵,包括沿x轴旋转γ角度、沿y轴旋转β角度、沿n轴旋转α角度、平移(x,y,z);
[0093][0094]
(4.4.4)、修改矩阵变换参数α、β、γ、x、y、n,重新构造变换矩阵;
[0095]
(4.4.5)、计算
[0096]
(4.4.6)、计算差值
[0097]
(4.4.7)、如果差值更小则保留该步骤的迭代修改;
[0098]
(4.4.8)、重复步骤(4.4.4)~(4.4.7),直至误差收敛。
[0099]
(4.5)使用上述第6步求得的标定矩阵t
ri
,对现有关键点进行坐标变换,重建其仿体坐标系坐标;
[0100]
(4.6)对于计算得到的仿体重建坐标系坐标,与真实值相差较大的点,作为离群点筛除;
[0101]
(4.7)重复(4.4)~(4.6),直至没有离群点被筛除,得到该横断面或矢状面的标定矩阵t
ri
;
[0102]
(5)、双平面标定矩阵求平均:根据超声探头两个成像平面相互正交的先验信息,对两个探头分别求得的标定矩阵求平均;
[0103]
(5.1)、对于横断面、矢状面,其标定矩阵形式上均为4*4矩阵(5.1)、对于横断面、矢状面,其标定矩阵形式上均为4*4矩阵其中其物理意义分别是超声探头轴线方向、正上方、正右方在接收器坐标系下的方向向量;
[0104]
(5.2)、令构造新的横断面、矢状面标定矩阵
[0105]
上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1