一种大型牲畜麻醉术后辅助恢复装置的制作方法
1.本发明涉及到畜牧兽医领域,具体的说是一种大型牲畜麻醉术后辅助恢复装置。
背景技术:
2.在大型牲畜,比如牛、马、驴、骡等饲养中,因为单个价值较高,在患病后一般都会由兽医进行麻醉后检查确认病因和病灶,在必要时甚至需要麻醉后进行手术,而且在手术完毕后,由于牲畜自身的随意性,经常会因为擦碰、踢挠、舔舐等原因,导致术后伤口缝合出现问题,再次产生出血、细菌感染等并发症,在这种情况下,一般也会在术后恢复时用麻醉药物,使牲畜处于静卧状态。
3.但是由于大型牲畜的体型和重量较大,静卧时很容易产生褥疮,因此需要饲养人员定期辅助翻身,不仅费时费力,而且还容易在翻身时操作不慎,导致伤口的二次开裂。
4.另外,由于大型牲畜的体型特点与人完全不同,主要是脖颈很长,头部重量也相对较大,因此一般防止长久卧床病人用的自动翻身设备并不能用在大型牲畜身上,否则很容易导致头部供血减少、甚至颈部骨折等二次伤害。
技术实现要素:
5.为了解决现有技术中缺乏辅助麻醉状态的大型牲畜翻身的问题,本发明提供了一种大型牲畜麻醉术后辅助恢复装置,本装置结合大型牲畜的体型特点和翻身难点,设计了相互配合的两部分,第一部分是将牲畜吊起的第一柔性带组和第二柔性带组,第二部分是将牲畜头部和尾部分别支撑的头部支撑座和腚部支撑座,之后两部分联动,使柔性带组和两个支撑座同步偏转,共同带动牲畜实现侧身翻躺,利用机械动力辅助翻身,解决了翻身困难、翻身中容易触碰伤口的问题。
6.本发明为解决上述技术问题所采用的技术方案为:一种大型牲畜麻醉术后辅助恢复装置,包括设置在可移动车体上、并用于支起大型牲畜颈部的第一柔性带组和支起大型牲畜腹部的第二柔性带组,位于所述第一柔性带组和第二柔性带组的下方设有可升降翻转轴,在可升降翻转轴上设置有头部支撑座和腚部支撑座,其中,腚部支撑座撑起牲畜的腚股部,且其前端延伸至牲畜后腿之间,所述头部支撑座具有容纳牲畜头部的u形容腔,所述可升降翻转轴由一翻转控制机构控制其发生偏转,且可升降翻转轴偏转的同时,所述第一柔性带组和第二柔性带组中的柔性承载带由卷轴动力带动其异侧移动,从而使牲畜整体产生侧翻动作。
7.作为上述大型牲畜麻醉术后辅助恢复装置的一种优化方案,所述第一柔性带组包括一块柔性承载带和四根同步升降承载杆,且位于可移动车体同侧的两根同步升降承载杆顶部之间设置有导向辊,所述柔性承载带的两侧分别绕过导向辊后,呈多圈缠绕在左侧拖拽辊和右侧拖拽辊上,并在两个导向辊之间形成承载区,所述左侧拖拽辊和右侧拖拽辊分别由两个卷轴动力带动其转动;所述第二柔性带组与第一柔性带组结构相同。
8.作为上述大型牲畜麻醉术后辅助恢复装置的另一种优化方案,所述同步升降承载
杆为底部铰接在可移动车体上的支撑杆,在支撑杆的一侧设置有控制其绕铰接点转动的举升机构。
9.作为上述大型牲畜麻醉术后辅助恢复装置的另一种优化方案,所述举升机构包括固定在同步升降承载杆内侧的连接杆,连接杆与转动套管配合,通过转动套管的正反转,驱动连接杆的伸出和回缩,从而带动同步升降承载杆之间承载区的升高和降低。
10.作为上述大型牲畜麻醉术后辅助恢复装置的另一种优化方案,所述转动套管由转动动力机构驱动其正反转,该转动动力机构包括与每一根转动套管外壁设有的外齿轮啮合的传动齿轮和驱动所有传动齿轮的驱动带,且该驱动带由一正反转电机驱动的减速齿轮组带动。
11.作为上述大型牲畜麻醉术后辅助恢复装置的另一种优化方案,所述翻转控制机构包括固定在可升降翻转轴的转轴上的翻转板,翻转板的一侧设置有电动伸缩推杆,利用电动伸缩推杆的伸缩,带动翻转板和转轴正转或反转。
12.作为上述大型牲畜麻醉术后辅助恢复装置的另一种优化方案,所述可升降翻转轴包括一根转轴,转轴的两端转动设置在轴承座内,轴承座设置在升降伸缩杆的顶部。
13.作为上述大型牲畜麻醉术后辅助恢复装置的另一种优化方案,所述头部支撑座设置在可升降翻转轴的转轴上的第一支撑板上,包括滑动设置在第一支撑板上的两块并排设置的夹持板,两块夹持板之间形成上宽下窄的u形容腔。
14.作为上述大型牲畜麻醉术后辅助恢复装置的另一种优化方案,所述腚部支撑座设置在可升降翻转轴的转轴上的第二支撑板上,包括通过若干根支撑杆固定在第二支撑板上的承载板,承载板具有向牲畜头部方向延伸的延伸端,且当承载板与牲畜腚股部接触时,延伸端处于牲畜后腿顶部之间,所述承载板从后端向延伸端的方向,宽度逐渐变窄、高度逐渐降低,且表面呈向下凹陷的弧形。
15.作为上述大型牲畜麻醉术后辅助恢复装置的另一种优化方案,所述承载板后部的两侧设置有导向杆,夹持杆在竖直面上保持与承载板侧壁平行,且与承载板侧壁之间形成夹持牲畜后腿上部的夹持空间。
16.与现有技术相比,本发明具有如下有益效果:
17.1)本发明依据大型牲畜(牛、马、骡、驴等)的体型特点(主要是脖子较长,且头部重量较大),将牲畜的脖颈和腹部采用柔性带组吊起,相当于是使牲畜身体重心处于两个柔性带组上,同时利用头部支撑座和腚部支撑座分别对牲畜的头尾部进行支撑,而且头部支撑座和腚部支撑座同轴偏转,并且在偏转的同时,两个柔性带组向相反方向移动,利用柔性带与牲畜皮肤的摩擦力,使牲畜整体完成两侧的侧躺;
18.2)本发明的柔性带组的主体是绕过导向辊后两侧多圈缠绕在拖拽辊上的柔性承载带,两根导向辊之间的柔性承载带形成承载牲畜脖颈或腹部的承载区,依靠重力使柔性承载带绷紧,这样当一侧的拖拽辊正向转动,将未缠绕的柔性承载带逐渐缠绕在其上时,另一侧的拖拽辊也正向转动,使已经缠绕在其上的柔性承载带逐渐从其上脱离下来,从而保持整个柔性承载带未缠绕部分总长度不变的同时,与牲畜脖颈或腹部接触的承载区发生转移,进而依靠其与牲畜皮毛的摩擦力,辅助实现牲畜从直立到一侧侧躺,或者从一侧侧躺到直立再到另一侧侧躺;柔性承载带必须与头部支撑座和腚部支撑座同步运动,共同配合,才能完成牲畜的侧躺翻身;柔性带组由同步升降承载杆带动其升降,从而实现柔性带组在下
降时穿入牲畜身下,升起后将牲畜架起;
19.3)本发明的头部支撑座和腚部支撑座固定在一根转轴上,转轴的高度可以调整,而且转轴由翻转控制机构控制其带动头部支撑座和腚部支撑座左右偏转,翻转控制机构的核心在于电动伸缩推杆推动的翻转板,利用电动伸缩推杆的伸缩推动翻转板绕转轴偏转,最终实现了头部支撑座和腚部支撑座带动牲畜头部和尾部与腹部和颈部同步偏转;
20.4)本发明的头部支撑座实际上是两块夹持板形成的上宽下窄的u形容腔,在牲畜翻转时,夹持板起到承托牲畜头部使其一并翻转的作用;并在牲畜侧躺时,夹持板起到对牲畜头部侧面的支撑;当然,在本发明中,在牲畜头部进入到u形容腔内后,可以采用柔性带将u形容腔的顶部封闭,防止牲畜头部滑脱出来;
21.5)本发明的腚部支撑座的核心是具有延伸端的承载板,承载板从后部向前部呈弧形逐渐降低,在腚部支撑座升起时,承载板的延伸端伸入到牲畜后肢与腹部交接处,承载板呈弧形是为了更好的承载牲畜的尾部,而延伸端则对后肢顶部内侧起到推动作用,促使牲畜尾部和头部一并翻转;为了更好对牲畜后肢起到固定作用,在承载板两侧设置导向杆,并且在导向杆上滑动设置夹持杆,夹持杆与承载板侧壁之间形成容纳并夹持牲畜后肢上部的夹持空间,夹持杆的作用在于,将牲畜后肢与尾部固定为一体的同时,起到辅助翻身的作用。
附图说明
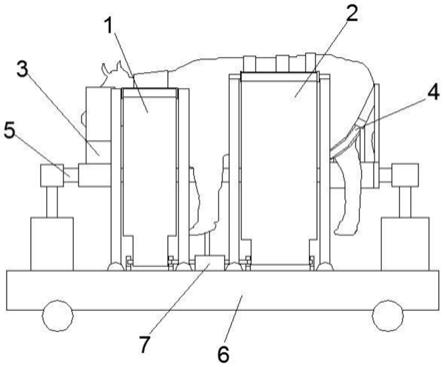
22.图1为本发明将牛类牲畜吊起但未翻身侧躺的示意图;
23.图2为本发明的整体结构示意图;
24.图3为图2的右视示意图;
25.图4为第一柔性带组和第二柔性带组的正面结构示意图;
26.图5为可升降翻转轴及其上头部支撑座和腚部支撑座的正面示意图;
27.图6为腚部支撑座的正面结构示意图;
28.图7为图6的右视示意图;
29.图8为图6的仰视示意图;
30.图9为头部支撑座的结构示意图;
31.图10为第一柔性带组的结构示意图;
32.图11为转动动力机构和举升机构的结构示意图;
33.附图标记:1、第一柔性带组,101、同步升降承载杆,102、导向辊,103、柔性承载带,104、左侧拖拽辊,105、右侧拖拽辊,106、承载区,107、固定带,2、第二柔性带组,3、头部支撑座,301、u形容腔,302、夹持板,303、弧形坡面,4、腚部支撑座,401、承载板,402、导向杆,403、夹持杆,404、延伸端,405、支撑杆,406、夹持空间,5、可升降翻转轴,501、转轴,502、轴承座,503、升降伸缩杆,504、翻转板,505、电动伸缩推杆,506、第一支撑板,507、第二支撑板,6、可移动车体,601、安装孔,7、卷轴动力,8、举升机构,801、连接杆,802、转动套管,9、转动动力机构,901、正反转电机,902、减速齿轮组,903、驱动带,904、传动齿轮。
具体实施方式
34.下面结合具体实施例对本发明做进一步的详细阐述,本发明以下各实施例中未做
阐明的部分,均为本领域技术人员所知晓的技术,或可以查到的技术,比如,可移动车体如何驱动和控制,电动伸缩推杆的结构和控制、升降伸缩杆的结构、减速齿轮组的结构、正反转电机的结构和控制、驱动带与齿轮的啮合等。
35.实施例1
36.如图1、2和3所示,一种大型牲畜麻醉术后辅助恢复装置,大型牲畜是指牛、马、骡、驴,包括设置在可移动车体6上、并用于支起大型牲畜颈部的第一柔性带组1和支起大型牲畜腹部的第二柔性带组2,可移动车体6一般为平板车,采用电力驱动,在空载时,从大型牲畜后腿之间伸入到牲畜身下,第一柔性带组1和第二柔性带组2可以在可移动车体6上移动,从而调整位置,适应不同体型的牲畜,车体6前端处于牲畜头部下方,从而使第一柔性带组1处于大型牲畜脖子下方,第二柔性带组2处于大型牲畜腹部,此时,控制第一柔性带组1和第二柔性带组2升高,使柔性带组接触牲畜后,暂停升高,注射麻醉药物进行检查;或者利用叉车等设备,将麻醉后的牲畜放到第一柔性带组1和第二柔性带组2上,这两个柔性带组的作用在于,保持牲畜的悬空,便于后续的翻转,位于所述第一柔性带组1和第二柔性带组2的下方设有可升降翻转轴5,如图5所示,在可升降翻转轴5上设置有头部支撑座3和腚部支撑座4,头部支撑座3设置在第一支撑板506上,如图6和7所示,腚部支撑座4通过若干根支撑杆405固定在第二支撑板507上,支撑杆405可以设计成可伸缩杆,进行长度调节,第一支撑板506和第二支撑板507均与转轴501固定,从而使其随转轴501能够翻转一定角度,其中,腚部支撑座4撑起牲畜的腚股部,腚股部是指,牲畜后肢上部与臀部,此处骨大肉厚,属于翻转牲畜的重心之一,且其前端延伸至牲畜后腿之间,这样能够在发生翻转时,对牲畜后肢上部内侧起到推动作用,所述头部支撑座3具有容纳牲畜头部的u形容腔301,由于大型牲畜的脖颈比较长比如马、驴、骡,牛的脖颈相对较短,但也远远大于一般动物的,且头重量也大,在麻醉后辅助其侧身翻转时,若不同步翻转头部,因为脖颈部的存在,很难使头部翻转,进而造成牲畜缺氧或缺血,因此,设计了u形容腔301,牲畜头部从u形容腔301顶部开口进入,底部起到支撑头部作用,两侧壁在翻转时,起到推动并支撑牲畜头部的作用,所述可升降翻转轴5由一翻转控制机构控制其发生偏转,所谓的偏转是指,绕转轴501的中心,正转或翻转一定角度,在发生翻转过程中,头部支撑座3和腚部支撑座4能够同步发生偏转,从而推动牲畜的头部、腚股后即尾部发生翻转,将其从直立状态,调整成向一侧侧躺的状态,且可升降翻转轴5偏转的同时,所述第一柔性带组1和第二柔性带组2中的柔性承载带由卷轴动力7带动其异侧移动,所谓异侧移动是指,当可升降翻转轴5向一侧翻转时,卷轴动力7拖拽柔性承载带向相反的一侧移动,此时由于牲畜的腹部和脖颈部重量堆积在柔性承载带上,在摩擦力的作用下,辅助牲畜的身体完成翻转,从而使牲畜整体产生侧翻动作。
37.本发明适用于牛、马、骡、驴等大型牲畜,大型牲畜在手术麻醉后的恢复过程,以及清醒状态下,进行麻醉检查的大型牲畜;
38.当需要对清醒状态下的大型牲畜麻醉进行检查时,本发明可升降翻转轴5上的头部支撑座3、腚部支撑座4、第一柔性带组1和第二柔性带组2处于可移动车体6上最低位置,可移动车体6移动到大型牲畜身下,调整头部支撑座3、腚部支撑座4、第一柔性带组1和第二柔性带组2的位置,使头部支撑座3、腚部支撑座4分别处于牲畜头部和尾部,第一柔性带组1和第二柔性带组2分别处于牲畜脖颈和腹部下方,再升高头部支撑座3、腚部支撑座4、第一柔性带组1和第二柔性带组2,使这四者逐渐升起与头部、尾部、脖颈和腹部接触,此时再对
牲畜进行麻醉,麻醉后牲畜自然会瘫倒在整个装置上,被整个装置承载;再使可升降翻转轴5向左侧翻转,同时第一柔性带组1和第二柔性带组2向右侧移动,最终牲畜呈现左侧躺位;经过一段时间后,一般为三四个小时,使可升降翻转轴5向右侧翻转,同时第一柔性带组1和第二柔性带组2向左侧移动,最终牲畜呈现右侧躺位;每隔一段时间翻转一次。
39.当需要对经过手术后,还未从麻醉状态清醒的牲畜使用时,需要先将本装置的头部支撑座3、腚部支撑座4、第一柔性带组1和第二柔性带组2升高到合适高度,之后利用叉车的辅助,将麻醉的牲畜直接放到本装置上,之后,进行自动翻身的操作与上述清醒状态下麻醉后的操作相同。
40.以上为本发明的基本实施方式,可在以上基础上做进一步的改进、优化和限定,从而得到以下各实施例:
41.实施例2
42.本实施例是在实施例1的基础上所做的一种改进方案,其主体结构与实施例1相同,改进点在于:如图3、4和10所示,所述第一柔性带组1包括一块柔性承载带103和四根对称设置在可移动车体6上的同步升降承载杆101,同步升降承载杆101能够同步升降,其目的在于利用降低时穿入到牲畜身下,之后升高后使柔性承载带103抬升,进而将牲畜吊起在柔性承载带103上,且位于可移动车体6同侧的两根同步升降承载杆101顶部之间设置有导向辊102,可移动车体6同侧是指,可移动车体6移动方向的两侧,即导向辊102与牲畜的头尾方向平行,并处于牲畜的两侧,导向辊102与同步升降承载杆101顶部转动连接,柔性承载带103绕过导向辊102并与导向辊102充分接触,所述柔性承载带103的两侧分别绕过可移动车体6两侧的导向辊102后,呈多圈缠绕在左侧拖拽辊104和右侧拖拽辊105上,左侧拖拽辊104和右侧拖拽辊105的主体是与导向辊102平行的辊轴,并且两端被轴承座支撑固定在可移动车体6表面,多圈缠绕是指,柔性承载带103在拖拽辊上固定后,转动拖拽辊,使其缠绕在拖拽辊上若干圈,并在两个导向辊102之间形成承载区106,承载区106是用来承载牲畜的颈部或腹部,因此是向下自然垂落的弧形,所述左侧拖拽辊104和右侧拖拽辊105分别由两个卷轴动力7带动其转动,所谓的卷轴动力7是指,电机带动的减速机,输出的动力直接驱动拖拽辊,两个卷轴动力7输出的动力都可以控制拖拽辊正反转,且左侧拖拽辊104转动将柔性承载带缠绕在其上时,右侧拖拽辊105将缠绕在其上的柔性承载带转动解下,从而保证不被两根拖拽辊缠绕的柔性承载带103的长度保持不变;所述第二柔性带组2与第一柔性带组1结构相同,且两个卷轴动力7分别同步带动第二柔性带组2与第一柔性带组1中的左侧拖拽辊104和右侧拖拽辊105转动。
43.实施例3
44.本实施例是在实施例2的基础上所做的一种改进方案,其主体结构与实施例2相同,改进点在于:如图4和10所示,在第一柔性带组1中的柔性承载带103上,处于承载区106的上方设置有固定带107,该固定带107用来将牲畜的脖颈固定在承载区106上;由于第二柔性带组2与第一柔性带组1结构相同,在第二柔性带组2中承载区上的固定带,是用来固定牲畜的腹部。
45.实施例4
46.本实施例是在实施例2的基础上所做的另一种改进方案,其主体结构与实施例2相同,改进点在于:所述同步升降承载杆101为底部铰接在可移动车体6上的支撑杆,也可以是
竖直设置在可移动车体6上的电动推杆,在支撑杆的一侧设置有控制其绕铰接点转动的举升机构8,举升机构8控制支撑杆从近似于水平抬起至近似于竖直,从而起到调整承载区106位置的作用,承载区106升高,将牲畜吊起,承载区106降低,将牲畜放下;可移动车体6两侧的同步升降承载杆101中的支撑杆在近似于水平位置时,处于可移动车体6的中间,实际上,可移动车体6两侧的支撑杆处于倾斜状态,搭在一起。
47.实施例5
48.本实施例是在实施例4的基础上所做的一种改进方案,其主体结构与实施例4相同,改进点在于:所述举升机构8为倾斜设置的电动推杆或液压推杆,当然,考虑到配套设备,一般选用电动推杆,或者采用如下结构,如图3和10所示,举升机构8包括固定在同步升降承载杆101内侧的连接杆801,连接杆801通过其外壁的外螺纹与设置在可移动车体6上安装孔601内的转动套管802配合,在可移动车体6上表面向下垂直钻安装孔601,安装孔601的数量和位置与同步升降承载杆101一一对应,在安装孔601内的顶部和底部设置两个轴承,转动套管802的外壁与两个轴承内圈固定,安装孔601的深度要大于转动套管802,即转动套管802的底部与安装孔601的底部之间具有间隙,从而形成连接杆801下降的空间,通过转动套管802的正反转,转动套管802的外壁具有外齿轮,该外齿轮与一个传动齿轮904啮合,传动动力带动传动齿轮904转动,从而带动转动套管802正反转,驱动连接杆801的伸出和回缩,转动套管802与连接杆801实际上是构成了反向的丝杠滑块机构,即常规的丝杠滑块机构是丝杠转动带动滑块沿丝杠往复移动,而本发明中,转动套管802正反转,带动连接杆801沿转动套管802内往复移动,即连接杆801伸出或缩回转动套管802,从而带动同步升降承载杆101之间承载区106的升高和降低。
49.实施例6
50.本实施例是在实施例5的基础上所做的一种改进方案,其主体结构与实施例5相同,改进点在于:如图10和11所示,所述转动套管802由转动动力机构9驱动其正反转,转动动力机构9整体设置在可移动车体6内的空腔中,该空腔为扁平状,并且与转动套管802所处的安装孔601连通,该转动动力机构9包括与每一根转动套管802外壁设有的外齿轮啮合的传动齿轮904和驱动所有传动齿轮904的驱动带903,外齿轮设置在转动套管802中部,并且与传动齿轮904啮合,在实际中,传动齿轮904为小齿轮,外齿轮为大齿轮,从而形成一定的减速,且该驱动带903由一正反转电机901驱动的减速齿轮组902带动,驱动带903一般是皮带或链条,驱动带903绕过每一个传动齿轮904形成闭环,并且与每一个传动齿轮904啮合,正反转电机901是能够输出正转动力和反转动力的电机,且输出的动力经过减速齿轮组902减速后带动驱动带903转动,减速齿轮组902也可以是减速齿轮箱,其输出的动力带动一个与驱动带903啮合的带轮或链轮,从而实现正反转电机901输出的动力减速后带动驱动带903,正反转电机901设置在可移动车体6内部空腔中,该空腔可以打开,以对正反转电机901进行检修,正反转电机901采用蓄电池供电,蓄电池也处于可移动车体6的另一个空腔内。
51.实施例7
52.本实施例是在实施例1的基础上所做的另一种改进方案,其主体结构与实施例1相同,改进点在于:如图5所示,所述翻转控制机构包括固定在可升降翻转轴5的转轴501上的翻转板504,翻转板504的一侧设置有电动伸缩推杆505,电动伸缩推杆505底部铰接在可移动车体6上,电动伸缩推杆505的初始位置,使翻转板504水平,同时使头部支撑座3和腚部支
撑座4处于竖直,当电动伸缩推杆505伸出,由于其底部铰接,推动翻转板504带动转轴501绕转轴501的中心发生偏转,进而带动头部支撑座3和腚部支撑座4同步偏转,利用电动伸缩推杆505的伸缩,带动翻转板504和转轴501正转或反转。
53.实施例8
54.本实施例是在实施例1的基础上所做的另一种改进方案,其主体结构与实施例1相同,改进点在于:如图5所示,所述可升降翻转轴5包括一根转轴501,转轴501的延伸方向与可移动车体6的行进方向一致,当可移动车体6处于牲畜身下位置时,转轴501与牲畜体长方向平行,并未与牲畜头尾连线下方,转轴501的两端转动设置在轴承座502内,轴承座502设置在升降伸缩杆503的顶部,在初始时,升降伸缩杆503处于最低,当第一柔性带组1和第二柔性带组2升高将牲畜吊起后,升降伸缩杆503伸出,抬升转轴501,从而使头部支撑座3和腚部支撑座4分别将牲畜头部和腚股部容纳进去,升降伸缩杆503可以选用电动推杆、液压油缸或液压气缸。
55.实施例9
56.本实施例是在实施例1的基础上所做的另一种改进方案,其主体结构与实施例1相同,改进点在于:如图9所示,所述头部支撑座3设置在可升降翻转轴5的转轴501上的第一支撑板506上,第一支撑板506与转轴501固定连接,随转轴501的翻转同步转动,其材质一般选用金属材质,包括滑动设置在第一支撑板506上的两块并排设置的夹持板302,夹持板302底部滑动设置在第一支撑板506的滑槽内,并且通过滑槽内的一根螺旋丝杠连接,通过转动螺旋丝杠使两块夹持板302沿滑槽相向移动或相悖移动,最终调节两块夹持板302的间距,即u形容腔301的大小;两块夹持板302之间形成上宽下窄的u形容腔301,夹持板302是竖直的s形,最终形成的u形容腔301实际上并不是u形,而是上部宽、下部窄的类似漏斗状,而且在宽窄交汇处形成向下的弧形坡面303,该弧形坡面303起到支撑牲畜头部侧面的作用,一般可以在弧形坡面303内侧面粘贴棉垫等柔性材料,或者在整个夹持板302相对的侧面都粘贴柔性材料。
57.实施例10
58.本实施例是在实施例1的基础上所做的另一种改进方案,其主体结构与实施例1相同,改进点在于:如图6、7和8所示,所述腚部支撑座4设置在可升降翻转轴5的转轴501上的第二支撑板507上,第二支撑板507与转轴501固定连接,随转轴501的翻转同步转动,其材质一般选用金属材质,包括通过若干根支撑杆405固定在第二支撑板507上的承载板401,支撑杆405一般设计成可伸缩杆,从而调整承载板401的高度,支撑杆405的分布位置,一般在承载板401后端对称两根,中部对称两根,前部一根或对称两根,支撑杆405的材质一般为金属管或金属杆,承载板401的材质一般选用金属板,并在表面铺设柔性材料衬垫,承载板401具有向牲畜头部方向延伸的延伸端404,牲畜头部方向是指,牲畜摆正后,其头尾连线形成的中线,朝向头部的一侧,且当承载板401与牲畜腚股部接触时,延伸端404处于牲畜后腿顶部之间,一般情况下,其最前端最好是超出到后腿顶部前方,所述承载板401从后端向延伸端404的方向,宽度逐渐变窄、高度逐渐降低,且表面呈向下凹陷的弧形,承载板401整体在水平面和竖直面的投影均为等腰梯形,凹陷的弧形能够更加贴合牲畜的腚股部形成,前窄后宽的设计,一来便于延伸端404伸入到牲畜后肢顶部与腹部的交接处,起到承托腹部的作用,二来还能在翻转牲畜时,起到推动牲畜后肢的作用。
59.实施例11
60.本实施例是在实施例10的基础上所做的另一种改进方案,其主体结构与实施例10相同,改进点在于:如图6、7和8所示,所述承载板401后部的两侧对称设置有导向杆402,导向杆402底部也通过至少一根支撑杆405固定在第二支撑板507上,起到辅助支撑作用,导向杆402上滑动设置有夹持杆403,在导向杆402上沿其长度方向分布有一个凹槽,夹持杆403的一端处于该凹槽内,能够沿该凹槽滑动,并固定在凹槽内的某处,从而调整夹持杆403与承载板401侧壁的间距,夹持杆403在竖直面上保持与承载板401侧壁平行,即,夹持杆403也是与承载板401一样的弧形弯曲角度,并且两者在竖直面上的投影重叠,且与承载板401侧壁之间形成夹持牲畜后腿上部的夹持空间406,夹持杆403的位置可在导向杆402上滑动,初始时处于导向杆402的最外侧,从而保证导向杆402处于牲畜后腿的外侧,当承载板401将牲畜腚股部抬起时,由于延伸端404此时处于牲畜后肢顶部与腹部交接处,此时移动夹持杆403,使其与承载板401侧壁配合将后肢上部夹持固定,从而辅助翻身。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1