一种用于偏瘫患者躺卧期的康复设备以及控制方法与流程
1.本发明涉及医疗康复设备技术领域,更具体的是涉及一种用于偏瘫患者躺卧期的康复设备以及控制方法技术领域。
背景技术:
2.骨科创伤指的就是由外伤引起的骨骼疾病,其中最常见的是骨折,其它还有手部、肩部、四肢及髋、膝、踝关节周围、脊柱等,出现扭伤或者高处坠落伤或者车祸伤或者摔伤等,都属于创伤骨科的范畴,此外,还有一些外伤性的疾病,如血管、神经或肌肉损伤也属于创伤骨科的范畴;骨折后要及时到医院找专业的骨科医生进行就诊,并拍片子确定骨折的程度及类型,以便制定下一步的治疗方案;对于一些较为严重且不便移动的创伤患者来说,手术后需要借助躺卧康复装置来帮助其恢复,现有的躺卧康复装置中,其功能单一,且结构复杂,大多都需对普通常规的床体进行大量结构修改才能进行适配安装,导致影响床体正常躺卧使用功能。
3.现在用于偏瘫患者在躺卧期的设备功能主要有如下几种方式:
①
绳吊辅助:该方法主要是通过将患者患腿通过绳子进行绑缚后悬挂起来,然后患者进行患腿的动作训练,只有患者的主动训练。
②
下肢脚踏式:这种方式就像踩单车一样给患者进行主动和被动训练的能力,体积比较小,可以让患者卧床康复,但是动作单一,只有让脚进行相应的圆周运动,训练功能过少。
技术实现要素:
4.本发明的目的在于:为了解决现有康复设备功能单一,占地空间大,不方便移动,需患者亲自到设备安装场地才能使用的技术问题,本发明提供一种用于偏瘫患者躺卧期的康复设备以及控制方法。
5.本发明采用的技术方案如下:一种用于偏瘫患者躺卧期的康复设备,包括控制箱和底板,所述底板上设置有滑轨,该滑轨的一端设置有髋固定端点,滑轨的另一端设置有固定端点,所述滑轨上滑动连接有滑块,该滑块的行程方向一端设置有拉伸线缆,滑块的行程方向另一端设置有屈曲线缆,所述屈曲线缆的另一端穿过髋固定端点与控制箱驱动连接,所述拉伸线缆的另一端穿过固定端点与控制箱驱动连接,所述滑块的两侧设置有高度调节杆,该高度调节杆上铰接有小腿部件,所述小腿部件的另一端铰接有大腿部件,该大腿部件的另一端与髋固定端点铰接。
6.所述小腿部件和大腿部件的铰接处安装有膝关节阻尼器,所述大腿部件和髋固定端点的铰接处安装有髋关节阻尼器,可手动调节阻尼,可主动锻炼。
7.所述高度调节杆上呈间距开有插销孔,方便调节小腿部件的高度,用于牵引时使用。
8.所述小腿部件上设置有小腿腿套,大腿部件上设置有大腿腿套,所述大腿腿套、小腿腿套是魔术贴绑带,使穿戴更方便。
9.所述控制箱内设置有卷扬机构、电机、主控控制板、电池,所述卷扬机构和电机均设置有2个,所述卷扬机构由电机驱动,其中一卷扬机构与拉伸线缆连接,另一卷扬机构与屈曲线缆连接,所述主控控制板与电机电性连接,所述控制箱的顶部设置有推车控制面板,该推车控制面板与主控控制板电性连接,所述电池给主控控制板、电机、推车控制面板提供电源,通过两个卷扬机构分别控制拉伸线缆、屈曲线缆交叉收缩,使患者被动锻炼。
10.所述控制箱的一侧顶部设置有控制箱推手,方便推动。
11.所述控制箱底部设置有底轮,方便移动。
12.所述髋关节阻尼器、膝关节阻尼器采用旋转阻尼器,小巧使用寿命长。
13.一种用于偏瘫患者躺卧期的康复设备的控制方法,使用上述任一项所述用于偏瘫患者躺卧期的康复设备,具体控制步骤如下:
14.步骤一、将小腿部件与小腿捆绑好,大腿部件与大腿捆绑好后,开启控制箱,系统自检开机成功能,进行模式选择界面;
15.步骤二、模式设置,选择“被动模式”、“主动模式”、“随动模式”、“牵引模式”中的任一项进行训练,直到康复训练完成。
16.所述“被动模式”通过主控控制板控制两个卷扬机构来实现拉伸线缆和屈曲线缆交叉收卷;所述“主动模式”分别通过髋关节阻尼器、膝关节阻尼器给大、小腿提供阻力;所述“随动模式”,卷扬机构、髋关节阻尼器、膝关节阻尼器均关闭,处于没有阻力的状态,能自由的进行活动;所述“牵引模式”,关节执行到对应所需位置,就进入锁定状态。
17.综上所述,由于采用了上述技术方案,本发明的有益效果是:
18.本发明针对绳吊带来的问题,改进结构,将复杂的绳吊部分改为可移动小型康复设备,这样的设备可以在任何一个床上都可以使用,不用使用特定的床位,控制使用集合到控制箱,该控制箱可以通过控制机构伸出来的拉伸线缆和屈曲线缆来控制腿部的动作,控制箱内有线驱控制装置,另外相对下肢脚踏式的动作,该床上机构部位可以实现多种控制功能,比如牵引,被动抬腿,主动锻炼等。
19.本发明简单易用,模式功能多,可以有效帮助患者实现更多的在康复期需要的功能;同时因为线驱的模式,重量轻,穿戴不复杂,控制简单稳定,整体设备体积小,占地面积小。
附图说明
20.本发明将通过例子并参照附图的方式说明,其中:
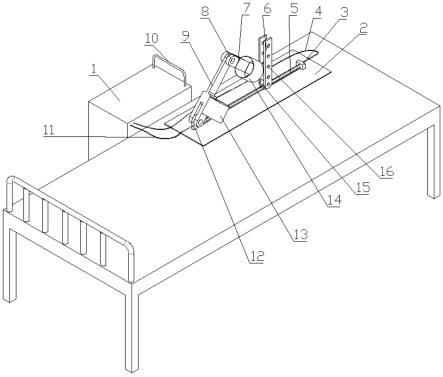
21.图1是本发明使用状态结构示意图;
22.图2是本发明主视结构示意图;
23.图3是本发明俯视结构示意图;
24.图4是本发明控制箱透视结构示意图;
25.图5是本发明滑块处局部放大图;
26.图6是本发明系统工作流程图;
27.图7是本发明控制电路示意图:
28.图中标记为:1-控制箱,2-底板,3-固定端点,4-拉伸线缆,5-滑轨,6-高度调节杆,7-小腿部件,8-膝关节阻尼器,9-大腿部件,10-控制箱推手,11-屈曲线缆,12-髋固定端点,
13-大腿腿套,14-小腿腿套,15-滑块,16-插销孔,17-底轮,18-髋关节阻尼器,19-推车控制面板,20-卷扬机构,21-电机,22-主控控制板,23-电池。
具体实施方式
29.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
30.因此,以下对在附图中提供的本发明的实施例的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
31.实施例1
32.如图1-5所示,本实施例提供一种用于偏瘫患者躺卧期的康复设备,包括控制箱1和底板2,所述底板2上设置有滑轨5,该滑轨5的一端设置有髋固定端点12,滑轨5的另一端设置有固定端点3,所述滑轨5上滑动连接有滑块15,该滑块15的行程方向一端设置有拉伸线缆4,滑块15的行程方向另一端设置有屈曲线缆11,所述屈曲线缆11的另一端穿过髋固定端点12与控制箱1驱动连接,所述拉伸线缆4的另一端穿过固定端点3与控制箱1驱动连接,所述滑块15的两侧设置有高度调节杆6,该高度调节杆6上铰接有小腿部件7,所述小腿部件7的另一端铰接有大腿部件9,该大腿部件9的另一端与髋固定端点12铰接。
33.实施例2
34.在实施例1的基础上,所述小腿部件7和大腿部件9的铰接处安装有膝关节阻尼器8,所述大腿部件9和髋固定端点12的铰接处安装有髋关节阻尼器18,可手动调节阻尼,可主动锻炼。
35.实施例3
36.在实施例1的基础上,所述高度调节杆6上呈间距开有插销孔16,方便调节小腿部件7的高度,用于牵引时使用。
37.实施例4
38.在实施例1的基础上,所述小腿部件7上设置有小腿腿套14,大腿部件9上设置有大腿腿套13所述大腿腿套13、小腿腿套14是魔术贴绑带,使穿戴更方便。
39.实施例5
40.在实施例1的基础上,所述控制箱1内设置有卷扬机构20、电机21、主控控制板22、电池23,所述卷扬机构20和电机21均设置有2个,所述卷扬机构20由电机21驱动,其中一卷扬机构20与拉伸线缆4连接,另一卷扬机构20与屈曲线缆11连接,所述主控控制板22与电机21电性连接,所述控制箱1的顶部设置有推车控制面板19,该推车控制面板19与主控控制板22电性连接,所述电池23给主控控制板22、电机21、推车控制面板19提供电源,通过两个卷扬机构20分别控制拉伸线缆4、屈曲线缆11交叉收缩,使患者被动锻炼。电池23的型号为:24v锂电池组,推车控制面板的型号为:mcgs 10寸昆仑通泰触摸屏,主控控制板22的型号为:alexo-main-board-v1.0.0,电机的型号为:robomaster m2006 p36。
41.实施例6
42.在实施例1的基础上,所述控制箱1的一侧顶部设置有控制箱1推手,方便推动。
43.实施例7
44.在实施例1的基础上,所述控制箱1底部设置有底轮17,方便移动。
45.实施例8
46.在实施例2的基础上,所述髋关节阻尼器18、膝关节阻尼器8采用旋转阻尼器,小巧使用寿命长,髋关节阻尼器18、膝关节阻尼器8的型号为圆盘阻尼器。
47.本发明的工作原理为:本发明通过两根控制线缆来控制床上结构的屈曲和伸直动作;屈曲线缆11的一端固定的端口在滑块15的一端,此时滑块15处在踝关节附近,屈曲线缆11的另一端固定在一个卷扬机构20上,通过电机21驱动,当屈曲线缆11收缩时,踝关节往大腿方向运动,患腿会进行屈曲;同样,伸直线缆的一端与滑块15的另一端连接,伸直线缆的另一端与另一个卷扬机构20连接,该卷扬机构20也通过另一个电机21驱动,当伸直线缆被驱动时,踝关节背离大腿方向运动,患腿会进行伸直动作;每个关节都有对应的阻尼器,膝关节处安装有膝关节阻尼器8,髋关节处安装有髋关节阻尼器18,当卷扬结构失能时,患者能自由活动,通过手动逐步加大阻尼器的大小能使患者自由活动受到一定的阻碍;当固定到最大时,关节不可活动,将进入到牵引状态,保持腿部不能运动。
48.实施例9
49.一种用于偏瘫患者躺卧期的康复设备的控制方法,使用上述任一项所述用于偏瘫患者躺卧期的康复设备,控制步骤如下:
50.步骤一、将小腿部件7与小腿捆绑好,大腿部件9与大腿捆绑好后,开启控制箱1,系统自检开机成功能,进行模式选择界面;
51.步骤二、模式设置,选择“被动模式”、“主动模式”、“随动模式”、“牵引模式”中的任一项进行训练,直到康复训练完成。
52.所述“被动模式”通过主控控制板22控制两个卷扬机构20来实现拉伸线缆4和屈曲线缆11交叉收卷;所述“主动模式”分别通过髋关节阻尼器18、膝关节阻尼器8给大、小腿提供阻力;所述“随动模式”,卷扬机构20、髋关节阻尼器18、膝关节阻尼器8均关闭,处于没有阻力的状态,能自由的进行活动;所述“牵引模式”,关节执行到对应所需位置,就进入锁定状态。
53.具体操作步骤如下:
54.1、将阻尼器调节到最小,将患者患腿穿戴在大腿腿套13和小腿腿套14上,开机;
55.2、通过高度调节杆6调节小腿部件7,使小腿的踝关节调节到高度适合的位置;
56.3、通过推车控制面板19设置对应的模式,如被动模式,开始进行康复运动,使腿在拉伸线缆4和屈曲线缆11的交叉收缩下,做曲展运动,实现被动锻炼;
57.4、当采用主动模式时,卷扬机构20停止,通过手动调节髋关节阻尼器18和膝关节阻尼器8的大小,实现主动锻炼。
58.5、当设置为随动模式时,关节处于没有阻尼的状态,能很自由的进行活动,此时主要提供的是矫形功能。
59.6、当设置为牵引模式时,推车控制面板19进入锁定模式,组织关节进行对应的活动,在进入牵引模式前设置为随动模式,自由调节大腿位置,然后可以通过控制高度调节杆
6的位置来确定抬腿的高度,完成全自由的牵引动作。
60.主要系统工作模式如下:
61.如图6所示,系统一开始进入开机状态,开机中会进行自检,当没有故障时,则会开机成功,进入模式设置,系统一开始默认是被动模式,当模式设置完成后则进入对应的康复训练,在康复训练时会有时间设置或者次数设置,达到对应的时间或者次数后会确认康复完成,由使用者确认下一个模式设置或者关机停止工作。
62.其中被动模式下,控制器会控制线缆来带动床上结构执行有规律的屈伸动作,具体表现为伸膝动作时小腿部件7会移动到滑轨5的左端部位直到腿完全伸直,屈膝动作时小腿部件7会移动到滑轨5的右端部位到一个可自由设定的位置。
63.其中主动模式下,一开始是无阻尼的随动模式,机器不在执行任何动作,同时也不会阻碍患者对腿部的活动;而调节系统的阻尼系数后,机器将产生对应的阻力对抗患者的活动,从而达到患者主动训练的效果,在主动模式下可以调节高度调节杆6的位置让患腿在更多的姿态下训练。
64.在主动模式下,可以进入牵引模式,该模式将锁定住控制器,从而让患腿固定在一个位置上,能让患腿进行一定牵引治疗。
65.控制电路如下:
66.如图7所示,整体控制电路由对应控制器以及驱动器和对应电路元器件组成,驱动部分主要为电机21伺服驱动器以及对应无刷直流电机21,同时通过电机21编码器以及外置的位置传感器如角度传感器,光电编码器,磁编码传感器等进行控制,另外该设置也有其它的辅助用传感器,比如拉压力传感器,力矩传感器,电流采样方法来确定设备阻尼的大小。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1