一种脊柱侧凸的模块化刚柔耦合智能矫形装置的制作方法
1.本发明属于涉及医疗器械领域。
背景技术:
2.青少年特发性脊柱侧凸(adolescent idiopathic scoliosis,ais)是青少年常见的致残性畸形,表现为脊柱的一个或数个节段向侧方凸曲并伴有椎体旋转的三维脊柱畸形。在美国,ais的发病率为1%-3%。在国内,北京、上海、广州,深圳等城市报道的ais发病率为0.1%-5%。ais的发展若不采取及时的有效干预及治疗,其侧凸角度会逐渐加重,导致躯干、胸廓变形,严重时甚至导致脊髓和脊神经损伤,同时还会出现呼吸系统及心脏功能障碍,严重影响青少年的身体健康和日常生活。因此,ais已经被列为继近视和肥胖后的第三大青少年疾病。当患者的ais进展到一定程度,则不得不采用一定的干预手段。其中,矫形器是最常用的方式。目前的矫形器主要分成刚性矫形器和柔性矫形器两大类。其中刚性矫形器多数为根据患者的侧凸位置进行定制化制作,制作成本高,并且青少年处于发育高峰期,定制化器械的使用寿命较短。此外,刚性矫形器的佩戴,容易造成患者的不舒服,患者医从性较低,从而影响治疗效果。另外一种矫形器是柔性矫形器,主要通过弹力带在侧凸位置施加一定的矫正力,一定程度上解决了刚性支具佩戴不适的问题,但是弹力带施加力度较小,难以达到矫正的效果,并且多数柔性支具的施加力点跨过肩部和胯部,对患者躯干的某一侧造成一定的压缩力,增加了脊柱侧凸的风险以及对青少年的生长发育也可能造成一定的影响。
技术实现要素:
3.本发明目的是为了解决现有柔性矫形器弹力带施加力度较小或柔性支具的施加力点跨过肩部和胯部增加了脊柱侧凸风险的问题,提供了一种脊柱侧凸的模块化刚柔耦合智能矫形装置。
4.本发明所述一种脊柱侧凸的模块化刚柔耦合智能矫形装置,包括:上部固定模块、中部固定模块、下部固定模块、刚性矫正丝和电机;
5.上部固定模块、中部固定模块和下部固定模块均为环形带状,且由上到下依次通过连接部件连接,每两个相邻的固定模块之间均设有多组连接部件,每组连接部件均包括两个连接杆,所述两个连接杆相对呈八字型支撑在相邻的两个固定模块之间,每个连接杆的两端均设有一个球体,每个固定模块在与连接杆的连接部均开有圆形凹槽,连接杆两端的球体设置在所述上部固定模块、中部固定模块或下部固定模块的圆形凹槽内,且所述球体可在圆形凹槽内转动;每个固定模块沿长度方向分为等长的两段结构;两段结构以人体中心线对称;每个固定模块的两段结构之间均通过锁扣连接;
6.上部固定模块的位置对应于人体腋下;所述电机设置在下部固定模块上;
7.刚性矫正丝的中点在上部固定模块的侧面,位于人体腋窝的下侧位置,通过锚点固定形成上部着力点,刚性矫正丝以中点为上部着力点沿人体的前后侧对应向斜下缠绕至
中部固定模块的侧面,所述中部固定模块的侧面设有锚点对绕经的刚性矫正丝进行固定形成中部着力点,刚性矫正丝经中部着力点后再对应人体的前后侧对应向斜下方缠绕,其中一端直接缠绕至电机的输出轴,另一端缠绕至下部固定模块的侧面经锚点固定后继续斜向下缠绕至电机的输出轴;
8.所述电机的输出轴向一个方向转动时刚性矫正丝收紧,向另一个方向转动时刚性矫正丝放松。
9.进一步地,本发明中,上部固定模块、中部固定模块和下部固定模块的外表面均设置有固定锚点,用于对刚性矫正丝的位置进行固定。
10.进一步地,本发明中,所述固定锚点采用刚性固定环实现。
11.进一步地,本发明中,上部固定模块、中部固定模块和下部固定模块沿长度方向分为两段,所述两段之间通过锁扣连接。
12.进一步地,本发明中,连接杆为刚性杆或者刚度较高允许小幅形变的刚性弹簧。
13.进一步地,本发明中,上部固定模块、中部固定模块和下部固定模块均为刚性结构。
14.进一步地,本发明中,上部固定模块、中部固定模块和下部固定模块内均设有柔性缓冲垫。
15.进一步地,本发明中,上部固定模块采用固定在衣服上或通过连接交叉背带的方式穿戴在人体上。
16.进一步地,本发明中,还包括压力传感器,所述压力传感器设置在中部固定模块的一段结构上,用于采集刚性矫正丝对中部固定模块施加压力位置的压力信号。
17.进一步地,本发明中,还包括电机驱动与控制模块、电池、无线通信电路和无线控制终端,无线控制终端与无线通信电路进行无线通信,无线控制终端用于为设置矫正压力值提供人机交互端口,并将设置的矫正压力值通过无线通信电路发送至电机驱动与控制模块,所述电驱动与控制模块根据压力传感器采集的压力信号和接收的矫正压力值对电机的转动方向和转动圈数进行自适应控制。
18.本发明结合了传统的刚性支具和柔性支具的优点,并且针对各自的不足,提出了一种模块化的刚柔耦合智能矫形器。通过三段式六个刚性固定模块的组合可对不同方向和不同位置的侧凸施加三点力,使得模块具有更高的灵活性和适应性。同时通过刚性体之间的运动副连接,既保证了各个模块之间的相对运动,也将两点力那一侧竖直方向的力内部平衡,使得矫形器不对躯干产生额外的压缩力。在三段式模块中的下端模块中,通过单点力侧力反馈或者电机处的力矩反馈实施获取三点力施加大小,并根据反馈的力大小控制驱动电机收缩或释放刚性绳或刚性带从而实现自适应控制三点力到某一个合适的范围内,从而实现既能达到矫形效果,又能改善患者的舒适性。
附图说明
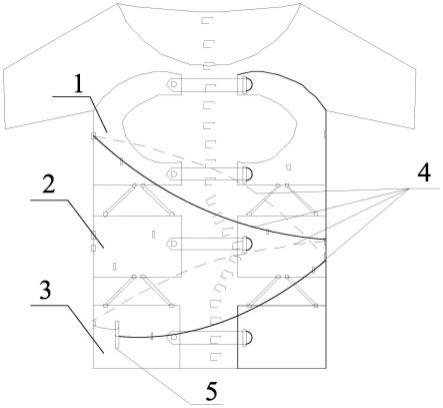
19.图1是本发明所述脊柱侧凸的模块化刚柔耦合智能矫形装置固定在衣服上时的主视图;
20.图2是本发明所述脊柱侧凸的模块化刚柔耦合智能矫形装置固定在衣服上时的后视图;
21.图3是上部固定模块的一段结构的结构示意图;
22.图4是中部固定模块的一段结构的结构示意图。
具体实施方式
23.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
24.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
25.具体实施方式一:下面结合图1至图4说明本实施方式,本实施方式所述一种脊柱侧凸的模块化刚柔耦合智能矫形装置,包括:上部固定模块1、中部固定模块2、下部固定模块3、刚性矫正丝4和电机5;
26.上部固定模块1、中部固定模块2和下部固定模块3均为环形带状,且由上到下依次通过连接部件连接,每两个相邻的固定模块之间均设有多组连接部件,每组连接部件均包括两个连接杆,所述两个连接杆相对呈八字型支撑在相邻的两个固定模块之间,每个连接杆的两端均设有一个球体,每个固定模块在与连接杆的连接部均开有圆形凹槽,连接杆两端的球体设置在所述上部固定模块1、中部固定模块2或下部固定模块3的圆形凹槽内,且所述球体可在圆形凹槽内转动;每个固定模块沿长度方向分为等长的两段结构;两段结构以人体中心线对称;每个固定模块的两段结构之间均通过锁扣连接;
27.上部固定模块1的位置对应于人体腋下;所述电机5设置在下部固定模块3上;
28.刚性矫正丝4的中点在上部固定模块1的侧面,位于人体腋窝的下侧位置,通过锚点固定形成上部着力点,刚性矫正丝4以中点为上部着力点沿人体的前后侧对应向斜下缠绕至中部固定模块2的侧面,所述中部固定模块2的侧面设有锚点对绕经的刚性矫正丝4进行固定形成中部着力点,刚性矫正丝4经中部着力点后再对应人体的前后侧对应向斜下方缠绕,其中一端直接缠绕至电机的输出轴,另一端缠绕至下部固定模块3的侧面经锚点固定后继续斜向下缠绕至电机的输出轴;
29.所述电机的输出轴向一个方向转动时刚性矫正丝4收紧,向另一个方向转动时刚性矫正丝4放松。
30.本发明采用了分段模块化的结构设计便于拆装并且当部分组件损坏或者患者侧凸位点和身高发生变化时,可进行模块化替换,增加了矫形器的适应能力同时降低了矫形器的维护成本。上部固定模块1的两段采用固定在衣服或者通过交叉背带的方式进行穿戴,上部固定模块1两段之间位于人体前后侧通过两处锁扣进行固定。中部固定模块2通过刚性杆与上部固定模块1连接,在刚性矫正丝4未进行拉伸时,起到悬挂连接的作用,当刚性矫正丝4进行拉伸时,起到支撑作用,防止上中下三个固定模块6段结构因垂直分力而靠拢;中部固定模块的左右两段之间通过两处锁扣进行固定。下部固定模块通过刚性杆与中部固定模块进行连接,在刚性矫正丝4未进行拉伸时,起到悬挂连接的作用,当刚性矫正丝4进行拉伸时,起到支撑作用;下部固定模块的左右侧两段之间前后侧通过两处锁扣进行固定。根据患者的侧凸位置与患者的个人躯干长度,可调整连接杆的长度,使得三点力施加在合适的位
置。本发明中的刚性矫正丝4可采用刚性牵引绳或带包括但不仅限于钢丝以及带状刚性绳以及高强线。
31.进一步地,本实施方式中,上部固定模块1、中部固定模块2和下部固定模块3的外表面均设置有固定锚点,用于对刚性矫正丝4的位置进行固定。
32.本实施方式中,上部固定模块1每段结构如图3所示,在每段结构的在前、后与侧面处各安装1个锚点共3个锚点;中部固定模块2的每段结构分别在前、后与侧面分别安装2个锚点共6个锚点,下部固定模块3的每段结构分别在前、后与侧面分别安装1个锚点共3个锚点。本发明只在需要的位置安装锚点,简化了结构设计。本发明在实际应用中可根据实际需要在所需位置设置锚点。
33.进一步地,本实施方式中,所述固定锚点采用刚性固定环实现。
34.进一步地,本实施方式中,连接杆为刚性杆。
35.本实施方式中的刚性杆或者刚度较高允许小幅形变的刚性弹簧为可根据人体实际身高调整连接杆或者弹簧的长短。
36.进一步地,本实施方式中,上部固定模块1、中部固定模块2和下部固定模块3均为刚性结构。
37.进一步地,本实施方式中,上部固定模块1、中部固定模块2和下部固定模块3内均设有柔性缓冲垫,每个固定模块的两段与身体相对侧均安装有柔性缓冲垫,改善佩戴舒适性。
38.进一步地,本实施方式中,上部固定模块1采用固定在衣服上或通过连接交叉背带的方式穿戴在人体上。
39.进一步地,本实施方式中,还包括压力传感器,所述压力传感器设置在中部固定模块2的一段结构上,用于采集刚性矫正丝4对中部固定模块2施加压力位置的压力信号。
40.本实施方式中,根据患者脊柱侧凸的方向不同,中部固定模块的两段位置可以调换,将具有压力传感器的结构段调整至脊柱凸侧。采用压力传感器采集中部固定模块2施加力侧的压力大小。
41.进一步地,本实施方式中,还包括电机驱动与控制模块、电池、无线通信电路和无线控制终端,无线控制终端与无线通信电路进行无线通信,无线控制终端用于为设置矫正压力值提供人机交互端口,并将设置的矫正压力值通过无线通信电路发送至电机驱动与控制模块,所述电驱动与控制模块根据压力传感器采集的压力信号和接收的矫正压力值对电机的转动方向和转动圈数进行自适应控制。
42.本实施方式中的电机的驱动与控制模块、无线通信电路和电池分别设置在下部固定模块的左右两段结构上,达到配重与平衡效果。本发明采用无线通信电路可通过蓝牙连接到移动终端,所述移动终端通常采用手机,通过手机进行记录患者基本信息与控制器和传感器的实时和历史参数,各种参数设置均通过手机app设置,简化电控模块,特别的,根据患者的侧凸方向的不同,刚性矫正丝的绕设方向不同,所述刚性矫正丝的绕设方向与使用的患者的脊柱凸出方向相关,用于向脊柱凸出方向施加力。
43.虽然在本文中参照了特定的实施方式来描述本发明,但是应该理解的是,这些实施例仅仅是本发明的原理和应用的示例。因此应该理解的是,可以对示例性的实施例进行许多修改,并且可以设计出其他的布置,只要不偏离所附权利要求所限定的本发明的精神
和范围。应该理解的是,可以通过不同于原始权利要求所描述的方式来结合不同的从属权利要求和本文中所述的特征。还可以理解的是,结合单独实施例所描述的特征可以使用在其他所述实施例中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1