一种冠心病介入手术机器人及系统的制作方法
本发明涉及医疗设备,尤其涉及一种冠心病介入手术机器人及系统。
背景技术:
1、冠心病微创介入技术是临床上治疗冠状动脉狭窄性病变的主要手段之一,虽然经过近半个世纪的不断发展,已经从最初的单纯球囊扩张,进展到了目前的完全可降解药物支架植入,但是仍然存在如下主要问题:
2、整个手术过程中,手术者和治疗团队都必须在x线设备附近工作,存在造成辐射损伤的较大风险。所有手术器械都必须完全由手术者及其助手全程掌握和操控,增加了工作强度和差错风险。手术者必须在掌控指引导管和全部介入治疗器械的同时,观察和保持介入器械的清洁度,及时清除残留的血液和造影剂。手术助手在协助手术者掌控介入器械的同时,还必须反复切换完成造影剂注射、球囊加压泵充放等工作。由于导丝外径和球囊导管内径非常细小以及环境光线控制等原因,球囊装载工作完全靠试错方式完成,比较耗时且效率不高。
技术实现思路
1、本发明实施例提供一种冠心病介入手术机器人及系统,用以使手术者及其团队能够在控制室通过远程操控完成手术,从而完全避免辐射损伤,并且极大降低劳动强度。
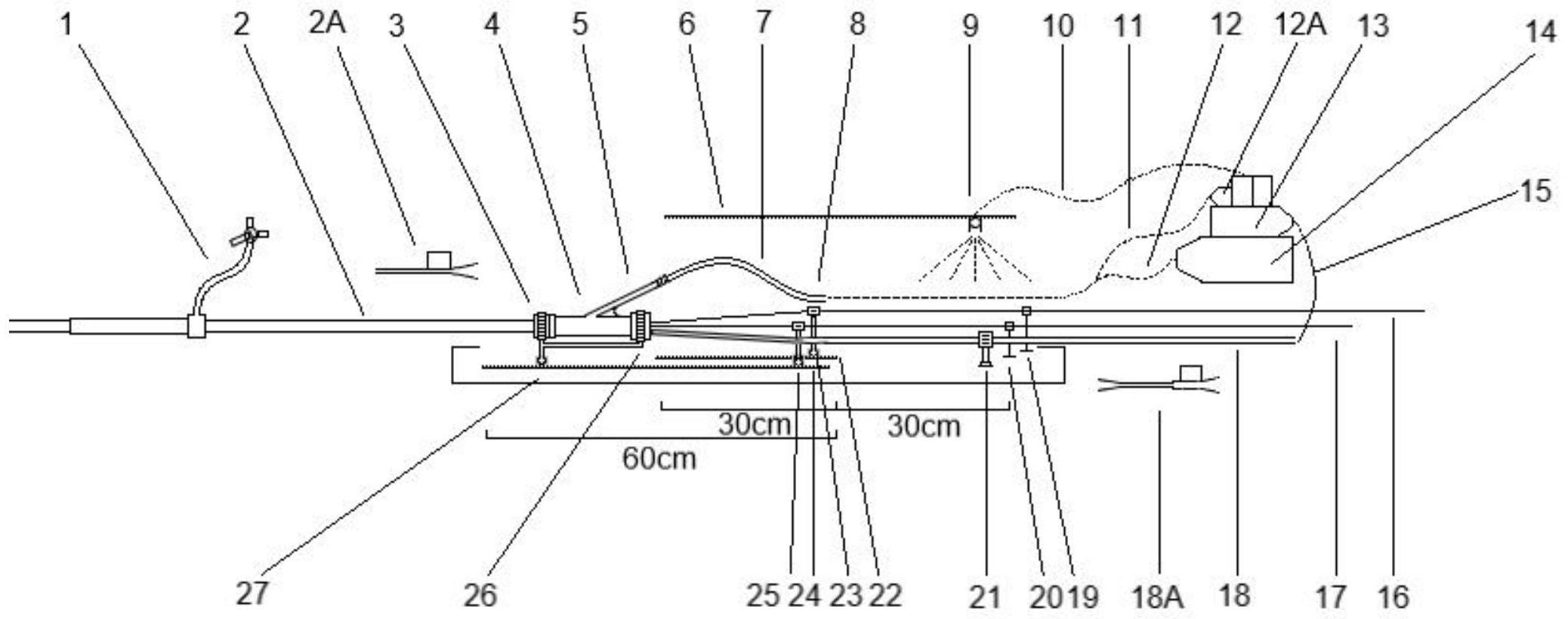
2、本发明实施例提供一种冠心病介入手术机器人,包括指引导管2,y形接头4;
3、所述指引导管2,连接至所述y形接头4的第一端,且所述y形接头4的第一端设置有用于转所述指引导管的第一旋转装置3;
4、所述y形接头4,其第二端上设置密封帽,基于密封帽送入或者撤出球囊导管18、第一指引导丝16和第二指引导丝17;
5、所述球囊导管18,用于基于与其相连的球囊充放泵13充盈或排放目标球囊;
6、所述第一指引导丝16,用于在第一导丝驱动装置8的带动下,输送所述第一导丝通过靶病变、到达并稳定于靶血管远端;
7、所述第二指引导丝17,用于在第二导丝驱动装置25的带动下,输送所述第二导丝通过靶病变、到达并稳定于靶血管远端;
8、所述y形接头4,其第三端连接有压力延长管7,所述压力延长管7上连接有造影剂注射泵14以及压力监测装置12a;
9、所述造影剂注射泵14,用于经由所述压力延长管7注射造影剂;
10、所述压力监测装置12a,用于基于所述压力延长管7监测指引导管2所处血管的压力参数。
11、在一些实施例中,所述第一旋转装置3包括:第一驱动杆301,第一驱动轴302以及第一进退驱动齿条27;
12、所述第一驱动杆302,设置在所述第一驱动杆301,其两端分别连接指引导管旋转马达和指引导管旋转装置;
13、所述第一驱动杆301,其与指引导管进退马达相连,以在指引导管进退马达的带动下,基于第一进退驱动齿条27带动指引导管2前进或者后退。
14、在一些实施例中,所述第一导丝驱动装置包括:第一导丝旋转装置8、第二进退齿条22、第一导丝进退马达23;
15、所述第一指引导丝16,在所述第二进退齿条22和第一导丝进退马达23的配合下实现前进或者后退;
16、所述第一导丝旋转装置8与所述第一指引导丝16连接,所述第一导丝旋转装置8用于根据控制指令旋转所述第一指引导丝16。
17、在一些实施例中,还包括第二指引导丝17,第三进退齿条24和第二导丝进退马达25;
18、所述第二指引导丝17在所述第三进退齿条24和第二导丝进退马达25的配合下实现前进或者后退。
19、在一些实施例中,还包括球囊导管进退驱动装置21;
20、所述球囊导管进退驱动装置21包括球囊导管进退驱动马达,球囊导管进退驱动马达用于驱动球囊导管到达靶病变并定位,以及当球囊扩张结束或支架释放完毕之后撤出球囊;
21、所述y形接头,其入口设置有密封帽驱动装置26,用于当球囊进入或撤出密封帽时,松开密封口,以使得球囊通过密封帽;以及当球囊完全进入或撤出密封帽后,控制密封口开度。
22、在一些实施例中,第一指引导丝16以及所述第二指引导丝17的尾部分别设置有对应的固定夹,以基于对应的固定夹固定该指引导丝。
23、在一些实施例中,还包括第四进退齿条6、冲洗马达9以及冲洗装置;
24、所述冲洗装置,用于在所述冲洗马达9的带动下,基于所述第四进退齿条6实现对管路区域的冲洗。
25、在一些实施例中,还包括球囊导管装载器2a以及指引导管导引器18a;
26、所述球囊导管装载器2a,为管状结构,活动固定于球囊导管进退马达外侧,其一端呈锥形,可基于第一开合柄实现开合;
27、所述指引导管导引器18a,为管状结构,两端均呈锥形,第二开合柄实现开合。
28、在一些实施例中,还包括控制器,与第一旋转装置、造影剂注射泵14以及压力监测装置12a电连接,用于发送控制指令,以操作关联的结构组件。
29、本申请实施例还提出一种冠心病介入手术系统,包括前述的冠心病介入手术机器人。
30、本发明实施例通过设置指引导丝以及对应的驱动装置实现带动目标球囊在血管中移动,并利用球囊充放泵充盈或排放目标球囊,由此实现了手术过程的远程控制,完全避免辐射损伤,并且极大降低劳动强度。
31、上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,而可依照说明书的内容予以实施,并且为了让本发明的上述和其它目的、特征和优点能够更明显易懂,以下特举本发明的具体实施方式。
技术特征:
1.一种冠心病介入手术机器人,其特征在于,包括指引导管(2),y形接头(4);
2.如权利要求1所述的冠心病介入手术机器人,其特征在于,所述第一旋转装置(3)包括:第一驱动杆(301),第一驱动轴(302)以及第一进退驱动齿条(27);
3.如权利要求1所述的冠心病介入手术机器人,其特征在于,所述第一导丝驱动装置包括:第一导丝旋转装置(8)、第二进退齿条(22)、第一导丝进退马达(23);
4.如权利要求3所述的冠心病介入手术机器人,其特征在于,还包括第三进退齿条(24)和第二导丝进退马达(25);
5.如权利要求3所述的冠心病介入手术机器人,其特征在于,还包括球囊导管进退驱动装置(21);
6.如权利要求4所述的冠心病介入手术机器人,其特征在于,第一指引导丝(16)以及所述第二指引导丝(17)的尾部分别设置有对应的固定夹,以基于对应的固定夹固定该指引导丝。
7.如权利要求1所述的冠心病介入手术机器人,其特征在于,还包括第四进退齿条(6)、冲洗马达(9)以及冲洗装置;
8.如权利要求1所述的冠心病介入手术机器人,其特征在于,还包括球囊导管装载器(2a)以及指引导管导引器(18a);
9.如权利要求1所述的冠心病介入手术机器人,其特征在于,还包括控制器,与第一旋转装置、造影剂注射泵(14)以及压力监测装置(12a)电连接,用于发送控制指令,以操作关联的结构组件。
10.一种冠心病介入手术系统,其特征在于,包括如权利要求1-9任一项所述的冠心病介入手术机器人。
技术总结
本发明公开了一种冠心病介入手术机器人及系统,包括指引导管(2),Y形接头(4);所述指引导管(2),连接至所述Y形接头(4)的第一端,且所述Y形接头(4)的第一端设置有用于转所述指引导管的第一旋转装置(3);所述Y形接头(4),其第二端上设置有Y形接头入口密封帽;所述球囊导管(18),用于基于与其相连的球囊充放泵(13)充盈或排放目标球囊;所述第一指引导丝(16),用于在第一导丝驱动装置的带动下,所述Y形接头(4),其第三端连接有压力延长管(7),所述压力延长管(7)上连接有造影剂注射泵(14)以及压力监测装置(12A)。本申请的方案使手术者及其团队能够在控制室通过远程操控完成手术,从而完全避免辐射损伤,并且极大降低劳动强度。
技术研发人员:卢才义,陈越猛
受保护的技术使用者:绍兴梅奥心磁医疗科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!