器械杆的刚性关节结构以及一种手术方法与流程
1.本发明属于手术机器人系统中手术器械技术领域,尤其涉及一种器械杆的刚性关节结构以及手术方法。
背景技术:
2.目前手术中使用的内窥镜手术器械均为直杆器械,在手术操作过程中手术器械的操作空间完全由器械在患者体内的入口位置和器械本身以及机械臂的可运动空间决定。如以某单台手术为例:圈套器、施夹钳、超声刀、持器钳等通过多个微孔同时或部分交替的进入患者体内,在操作过程中,每个导入微孔给器械提供的平直运动空间是有限的,这样一来造成器械的可运动轨迹受限。造成一种结果:因患者体内器官组织的位置相互阻碍,不改变患者体内的入口位置的情况下某些位置的手术操作无法实现,为了实现完整地手术操作就要在患者身体重新进行开孔,并重新布局手术机器人和手术器械及其它手术设备,如此则增加了患者创口、手术时间,由此同样增加了手术的风险性。
技术实现要素:
3.本发明的目的在于克服现有技术的缺陷,提供一种器械杆的刚性关节结构以及手术方法。
4.为实现上述目的,本发明采用了如下技术方案:
5.一种器械杆的刚性关节结构,包括驱动器以及与所述驱动器相连的器械杆,所述器械杆包括固定端器械杆以及活动端器械杆,所述固定端器械杆与驱动器固定连接,所述活动端器械杆与固定端器械杆可转动的连接;驱动器包括能够带动所述活动端器械杆相对于固定端器械杆转动一定角度并持续保持所转动的角度的驱动机构。
6.优选的,所述驱动机构包括双向同步驱动杆、与所述双向同步驱动杆相连的动力转换部以及与所述动力转换部相连的传动杆;
7.所述双向动力驱动杆的侧壁设置有两组旋向相反的螺纹;
8.所述动力转换部分别通过螺纹与双向动力驱动杆相连;
9.所述动力转换部包括第一动力转换杆和第二动力转换杆,第一动力转换杆与第二动力转换杆分别与两组旋向相反的螺纹相连,当双向动力驱动杆转动时,第一动力转换杆与第二动力转换杆移动方向相反;双向动力驱动杆与用于连接外部动力机构的动力齿轮部相连。
10.优选的,所述传动杆的一端与动力转换部固定连接,传动杆的另一端自器械的近端向器械的远端延伸最终与活动端器械杆铰接;
11.所述动力齿轮部包括卡盘、与所述卡盘固定连接的传动轴、与所述传动轴固定连接的主齿轮以及与所述主齿轮相啮合的副齿轮,所述副齿轮与双向动力驱动杆固定连接。
12.优选的,所述传动杆包括第一传动杆和第二传动杆,所述第一传动杆和第二传动杆分别与第一动力转换杆和第二动力转换杆固定连接;
13.第一传动杆通过径向导向轴与第一动力转换杆相连,第二传动杆通过径向导向轴与第二动力转换杆相连;所述径向导向轴的一部分插装在与其相对应的第一动力转换杆或第二动力转换杆中;当双向动力驱动杆转动时,传动杆随之移动,活动端器械杆随之转动,径向导向轴随之在固定端器械杆的径向方向移动;
14.活动端器械杆与固定端器械杆之间通过转轴固定连接,第一传动杆与活动端器械杆相连的位置和第二传动杆与活动端器械杆相连的位置分别位于所述转轴的两侧。
15.优选的,第一传动杆与活动端器械杆间铰接轴为a,第二传动杆与活动端器械杆间的铰接轴为b,a与b的轴线位于同一平面内,所述平面垂直于活动端器械杆的中轴线,所述a与b的位置以所述转轴的中轴线为中心相互对称。
16.优选的,所述活动端器械杆包括连接座以及与连接座可转动的连接的杆体;
17.所述连接座与固定端器械杆之间通过转轴相连;
18.杆体可在活动端器械杆旋转机构的带动下以杆体的轴线为轴心进行转动。
19.优选的,所述活动端器械杆旋转机构包括设置在活动端器械杆内的两个推动杆,所述杆体的内部设置有两条驱动槽;
20.所述两条驱动槽分别沿着活动端器械杆的内侧壁螺旋设置,所述两条驱动槽的升角相等,所述两条驱动槽的旋向相反。
21.推动杆的远端通过圆柱末端与驱动槽相配合;推动杆的近端与驱动绳固定连接,驱动绳自固定端器械杆伸入活动端驱动杆并最终与推动杆固定连接;
22.所述杆体的内侧壁固定设置有导向孔,所述推动杆分别穿插在与其位置相对应的导向孔内。驱动绳与驱动器中的驱动轮相连,在工作时,两个推动杆的运动方向相反,驱动轮转动,驱动绳拉动其中一个驱动杆,杆体随之进行转动。
23.优选的,所述固定端器械杆的末端固定设置有导向体,所述导向体上设置有出线孔;驱动器的驱动绳通过所述导线孔伸出至活动端器械杆内;
24.所述螺纹为能够自锁的梯形螺纹。
25.优选的,出线孔的出线口所在平面c垂直于固定端器械杆的中轴线,固定端器械杆与活动端器械杆之间的转轴的中轴线位于所述平面c内,出线口的中心点与所述固定端器械杆的中轴线重合。
26.一种手术方法,将包含了权利要求1-9任意一项所述刚性关节结构的手术器械配置于手术机器人系统中进行手术。通过术前医学影像判断目标组织与其它组织间的可供器械动作的空间,制定器械路径;根据器械路径制定手术机器人系统的机械臂的运动轨迹以及运动范围,并通过改变活动端器械杆与固定端器械杆间的转动角度来跨越障碍组织。
27.本发明的器械杆的刚性关节结构,可以使得手术器械在手术中通过改变器械杆的形态扩展手术器械的空间,完成大范围的手术操作,提高手术效率。
附图说明
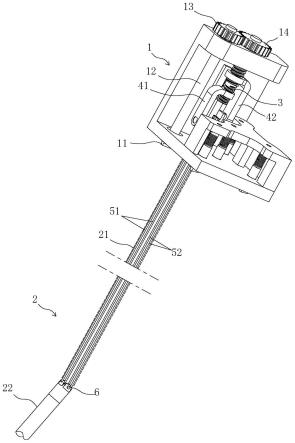
28.附图1是本发明的结构示意图;
29.附图2是本发明的动力转换部的结构与器械杆的结构示意图;
30.附图3是本发明的活动端器械杆旋转机构的结构示意图;
31.附图4是本发明的导向体的结构示意图;
32.附图5是本发明的出线空的出线口的位置的结构示意图;
33.附图6是本发明的推动杆的结构示意图(其中上半部分为透视示意,下半部分为半剖示意);
34.附图7是本发明的连接座的结构示意图;
35.附图8是本发明一个实施例的模拟器械的应用场景的示意图;
36.在附图中,1驱动器、11卡盘、12传动轴、13主齿轮、14副齿轮、2器械杆、21固定端器械杆、22活动端器械杆、221连接座、222杆体、3双向同步驱动杆、41第一动力转换杆、42第二动力转换杆、51第一传动杆、52第二传动杆、6转轴、7推动杆、71圆柱末端、8驱动槽、9导向孔、10导向体、101出线孔、102驱动绳、103驱动轮、104径向导向轴、l1转轴的中轴线、l2固定端器械杆的中轴线。
具体实施方式
37.以下结合附图给出的实施例,进一步说明具体实施方式。本发明不限于以下实施例的描述。在下述实施例中,以本领域技术人员的常用方位进行描述:以靠近手术机器人的机械臂系统或医生的操作端的位置为近端,另一端为远端。
38.在下述实施例中,主要公开了一种能够应用于微创口手术过程中所使用的具有长杆状器械中的刚性关节结构,其相对于其它类型长干状器械的关节结构,如柔性部类型关节,在调整关节角度后,支撑能力更加稳定可靠。
39.实施例1
40.如图1和2所示,一种器械杆的刚性关节结构,包括驱动器以及与所述驱动器相连的器械杆,所述器械杆包括固定端器械杆以及活动端器械杆,所述固定端器械杆与驱动器固定连接,所述活动端器械杆与固定端器械杆可转动的连接。
41.所述驱动器包括能够带动所述活动端器械杆相对于固定端器械杆转动一定角度并持续保持所转动的角度的驱动机构。
42.参照图2和3所示,优选的,所述驱动机构包括双向同步驱动杆、与所述双向同步驱动杆相连的动力转换部以及与所述动力转换部相连的传动杆;
43.所述双向动力驱动杆的侧壁设置有两组旋向相反的螺纹;
44.所述动力转换部分别通过螺纹与双向动力驱动杆相连;
45.所述动力转换部包括第一动力转换杆和第二动力转换杆,第一动力转换杆与第二动力转换杆分别与两组旋向相反的螺纹相连,当双向动力驱动杆转动时,第一动力转换杆与第二动力转换杆移动方向相反。
46.在使用时,卡盘与手术机器人的机械臂中的驱动器对接,驱动器带动卡盘转动,卡盘通过传动轴带动主齿轮转动,主齿轮带动副齿轮转动,副齿轮带动双向动力驱动杆转动。卡盘与传动轴固定连接,主齿轮与传动轴固定连接,副齿轮与主齿轮相啮合,副齿轮与双向动力驱动杆固定连接。
47.参照附图1和2,所述传动杆的一端与动力转换部固定连接,传动杆的另一端自器械的近端向器械的远端延伸最终与活动端器械杆铰接。
48.参照附图2所示,所述传动杆包括第一传动杆和第二传动杆,所述第一传动杆和第二传动杆分别与第一动力转换杆和第二动力转换杆固定连接。如图1所示,在本实施例中,
分别设置两根第一传动杆和第二传动杆。
49.参照附图7,活动端器械杆与固定端器械杆之间通过转轴固定连接,第一传动杆和第二传动杆与活动端器械杆相连的位置分别位于所述转轴的两侧。如图2所示,第一传动杆通过径向导向轴与第一动力转换杆相连,第二传动杆通过径向导向轴与第二动力转换杆相连;所述径向导向轴的一部分插装在与其相对应的第一动力转换杆或第二动力转换杆中。当双向动力驱动杆转动时,传动杆随之移动,活动端器械杆随之转动,径向导向轴随之在固定端器械杆的径向方向移动。
50.如图1所示,优选的,在本发明的一些实施例中,所述与第一传动杆相连的径向导向轴的一端插装在与其相对应的第一动力转换杆的径向导向孔内,与第二传动杆相连的径向导向轴的一端插装在与其相对应的第二动力转换杆的径向导向孔内,所述径向导向轴的另一端与其相对应的第一传动杆或第二传动杆固定连接。
51.优选的,径向导向轴的轴线垂直于固定端器械杆的轴线。
52.参照图7和1所示,优选的,第一传动杆与活动端器械杆间铰接轴所在位置为a,第二传动杆与活动端器械杆间的铰接轴所在位置为b,a与b的轴线位于同一平面内,所述平面垂直于活动端器械杆的中轴线,所述a与b的位置以所述转轴的中轴线为中心相互对称。
53.参照图2和7所示,优选的,所述活动端器械杆包括连接座以及与连接座可转动的连接的杆体,连接座与固定端器械杆之间通过转轴相连。
54.杆体可在活动端器械杆旋转机构的带动下以杆体的轴线为轴心进行转动。
55.参照附图3和6所示,优选的,所述活动端器械杆旋转机构包括设置在活动端器械杆内的两个推动杆,所述杆体的内部设置有两条驱动槽。两条驱动槽沿着杆体的内部螺旋设置。所述两条驱动槽的升角相等,所述两条驱动槽的旋向相反。
56.推动杆的远端通过圆柱末端与驱动槽相配合;推动杆的近端与驱动绳固定连接,驱动绳自固定端器械杆伸入活动端驱动杆并最终与推动杆固定连接;
57.所述杆体的内侧壁固定设置有导向孔,所述推动杆分别穿插在与其位置相对应的导向孔内。驱动绳与驱动器中的驱动轮相连,在工作时,两个推动杆的运动方向相反。驱动轮转动,驱动绳拉动其中一个驱动杆,杆体随之进行转动。
58.驱动轮与卡盘固定连接,在使用时卡盘与手术机器人的驱动器相连,卡盘转动带动驱动轮转动,从而带动推动杆的驱动绳拉伸。
59.参照附图5,优选的,所述固定端器械杆的末端固定设置有导向体,所述导向体上设置有出线孔;驱动器的驱动绳通过所述导线孔伸出至活动端器械杆内;
60.所述螺纹为能够自锁的梯形螺纹。
61.优选的,出线孔的出线口所在平面c垂直于固定端器械杆的中轴线,固定端器械杆与活动端器械杆之间的转轴的中轴线位于所述平面c内。优选的,出线口的中心点与所述中轴线重合。
62.实施例2
63.如图8所示,参照附图1,本实施例例举了包含了实施例1中所公开的器械轴的刚性关节结构的器械的使用方法。参照附图8所示,在腹腔开设微孔,并植入导向器,将器械杆伸入腹腔,当特殊病灶情况下,相邻组织区域t1对目标组织区域t2造成一定的遮挡,并且其它位置的微孔有不适用手术方案或因人体生理特性的因素导致其它微孔位置造成手术风险
更高。在此状况下,操作者试图实施器械跨组织的手术方案:多个器械经过单孔或多孔进入体内,在预先规划的路径内跨越障碍组织,实施手术。
64.具体地,一种手术方法,将带有所述刚性关节结构的手术器械配置于手术机器人系统中进行手术。
65.通过术前的医学影像判断目标组织与其它组织间的可供器械动作的空间,制定器械路径。
66.根据器械路径制定手术机器人系统的机械臂的运动轨迹以及运动范围,并通过改变活动端器械杆与固定端器械杆间的转动角度来跨越障碍组织。
67.以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1