非预期操作检测方法、检测系统、机器人系统及存储介质与流程
本发明涉及医疗器械,特别涉及一种非预期操作检测方法、检测系统、机器人系统及存储介质。
背景技术:
1、手术机器人系统能够使医生在主端操控台处通过二维或三维的显示设备观察病人体内的组织特征,并以主从遥操作的方式操控主端操控台上的主操作手,通过主从映射驱动从端机器人上的机械臂及手术工具器械来完成手术的操作。医生能够以与传统手术相同的方式及感觉来完成微创伤手术的操作,大大减轻了医生进行微创伤手术时的困难程度,同时也提高了手术的效率和安全性,并使得远程手术的实现发生了突破性的进展。
2、若手术过程中如果主操作手产生非预期的运动,从端跟随运动时极易引起手术风险,然而目前没有特定的主操作手非预期运动检测技术,相关的比如碰撞检测技术和防止主操作手被外界碰撞干扰发送非预期运动的方法有:
3、1)对从端机器人的机械臂与机械臂之间、机械臂关节之间的碰撞检测,如采用obb包围盒碰撞检测;
4、2)采用围栏防止外界对主端操控台的碰撞干扰。
5、这些相关的检测技术存在的缺陷或不足有:
6、1)obb包围盒碰撞检测主要针对运动信息已知的凸多面体规则外形的刚体结构之间的碰撞检测,不适用于外界碰撞干扰的检测。
7、2)采用围栏并不能完全防止外部的碰撞干扰,围栏保护不到的区域一旦有外部碰撞发生则会造成主操作手的非预期运动。
技术实现思路
1、本发明的目的在于提供一种非预期操作检测方法、非预期操作检测系统、手术机器人系统、可读存储介质及计算机设备,以解决现有技术中无法对手术机器人的主操作手的非预期运动进行检测的问题。
2、为解决上述技术问题,本发明提供一种非预期操作检测方法,其包括:
3、获取操作端及所述操作端邻接的操作区域的图像信息;
4、获取所述操作端的至少一个关节的附加检测数据;以及
5、根据所述图像信息和所述附加检测数据,基于预设算法判断所述操作端是否产生非预期操作。
6、可选的,所述附加检测数据包括操作者与所述操作端的接触应力数据;根据所述图像信息和所述附加检测数据,基于预设算法判断所述操作端是否产生非预期操作的步骤包括:
7、根据所述图像信息和所述接触应力数据,基于预设算法得到所述操作者与所述操作端之间的结合状态;若所述结合状态为所述操作者与所述操作端相脱离,而所述操作端的运动速度超过预设阈值,则判断所述操作端产生非预期操作。
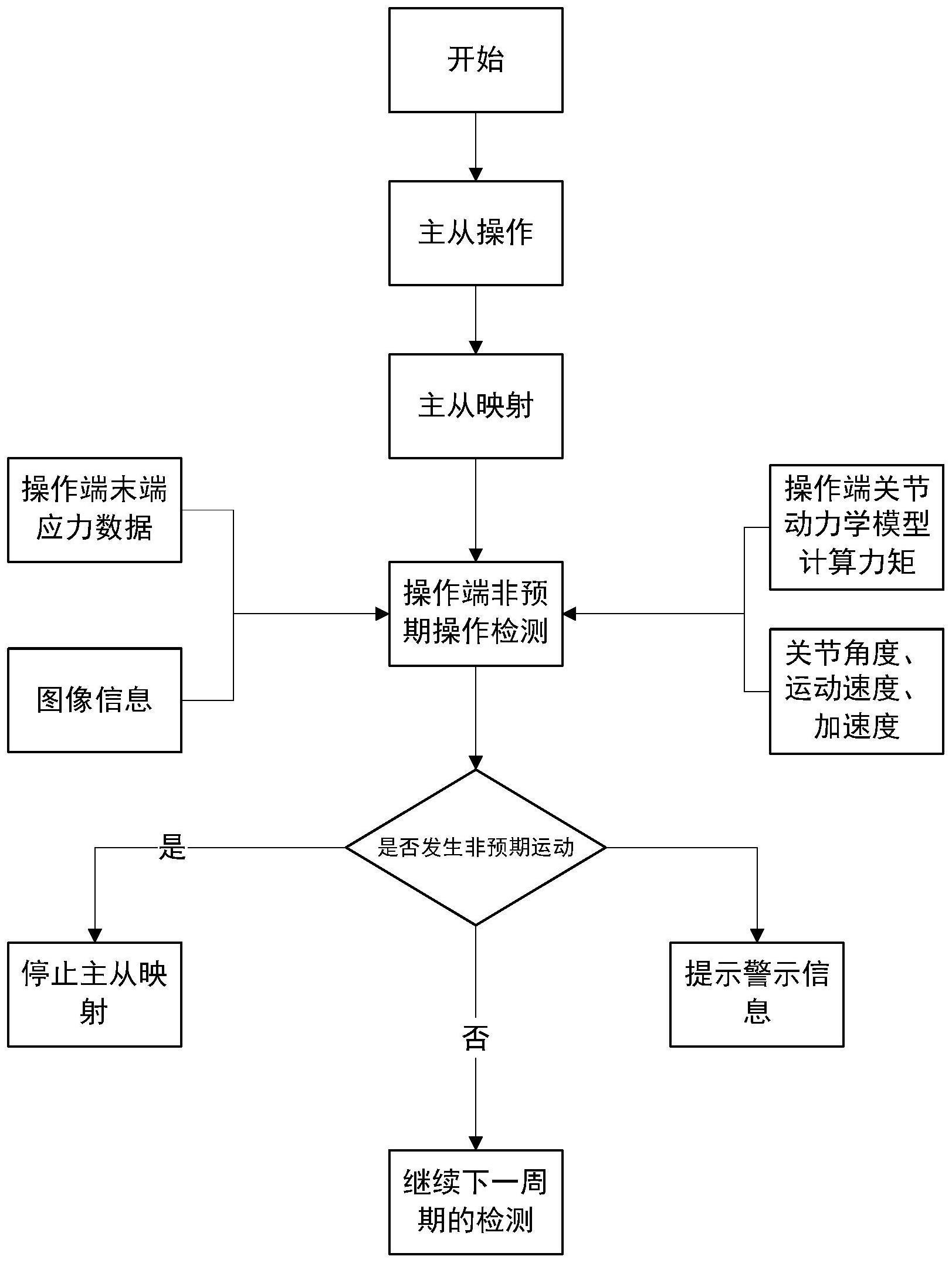
8、可选的,所述附加检测数据包括操作者与所述操作端的接触应力数据;所述附加检测数据还包括关节的角度数据、速度数据、加速度数据以及关节驱动力矩数据;根据所述图像信息和所述附加检测数据,基于预设算法判断所述操作端是否产生非预期操作的步骤包括:
9、利用所述角度数据、速度数据及加速度数据得到关节的计算力矩数据;
10、基于所述计算力矩数据和所述关节驱动力矩数据得到所述操作端上的关节所受的外力矩数据;
11、根据所述接触应力数据和所述外力矩数据得到所述操作者与所述操作端之间的操作状态;
12、根据所述图像信息和所述操作状态,基于预设算法判断所述操作端是否被外部撞击;若是,则判断所述操作端产生非预期操作。
13、可选的,所述关节驱动力矩数据基于关节电机的电流反馈得到,或者,所述关节驱动力矩数据基于关节力矩传感器检测得到。
14、可选的,若判断所述操作端产生非预期操作,所述非预期操作检测方法还包括:提示警示信息,和/或,限制所述操作端与从端装置的主从映射。
15、可选的,所述预设算法包括加权平均法、卡尔曼滤波算法以及人工神经网络算法中的至少一者。
16、为解决上述技术问题,本发明还提供一种非预期操作检测方法,其包括:
17、获取操作者与操作端的接触应力数据;
18、获取所述操作端的至少一个关节的角度数据、速度数据、加速度数据以及关节驱动力矩数据;
19、利用所述角度数据、速度数据及加速度数据得到关节的计算力矩数据;
20、基于所述计算力矩数据和所述关节驱动力矩数据得到所述操作端上的关节所受的外力矩数据;
21、根据所述接触应力数据和所述外力矩数据得到所述操作者与所述操作端之间的操作状态;
22、若所述操作状态为所述操作者对所述操作端施加的操作力矩数据与所述外力矩数据不相等,则判断所述操作端产生非预期操作。
23、为解决上述技术问题,本发明还提供一种非预期操作检测系统,其包括:视觉传感器、附加传感器以及控制装置;
24、所述视觉传感器用于获取操作端及所述操作端邻接的操作区域的图像信息;
25、所述附加传感器用于获取所述操作端的至少一个关节的附加检测数据;
26、所述控制装置用于根据所述图像信息和所述附加检测数据,基于预设算法判断所述操作端是否产生非预期操作。
27、可选的,所述附加传感器包括设置于所述操作端上的应力传感器,所述附加检测数据包括操作者与所述操作端的接触应力数据,所述应力传感器用于获取所述接触应力数据;
28、所述控制装置根据所述图像信息和所述接触应力数据,基于预设算法得到所述操作者与所述操作端之间的结合状态;若所述结合状态为所述操作者与所述操作端相脱离,而所述操作端的运动速度超过预设阈值,则判断所述操作端产生非预期操作。
29、可选的,所述附加传感器包括设置于所述操作端上的应力传感器、关节角度传感器、关节速度传感器以及关节加速度传感器;所述附加传感器还包括设置于所述操作端上的关节力矩传感器或关节电机电流传感器;
30、所述附加检测数据包括操作者与所述操作端的接触应力数据;所述附加检测数据还包括关节的角度数据、速度数据、加速度数据以及关节驱动力矩数据;所述应力传感器用于获取所述接触应力数据;所述关节角度传感器用于获取所述角度数据;所述关节速度传感器用于获取所述速度数据;所述关节加速度传感器用于获取所述加速度数据;
31、所述关节驱动力矩数据基于所述关节电机电流传感器所反馈的电流得到,或者,所述关节驱动力矩数据基于所述关节力矩传感器检测得到;
32、所述控制装置被配置为,利用所述角度数据、速度数据及加速度数据得到关节的计算力矩数据;基于所述计算力矩数据和所述关节驱动力矩数据得到所述操作端上的关节所受的外力矩数据;根据所述接触应力数据和所述外力矩数据得到所述操作者与所述操作端之间的操作状态;根据所述图像信息和所述操作状态,判断所述操作端是否被外部撞击;若是,则判断所述操作端产生非预期操作。
33、可选的,所述非预期操作检测系统还包括警示装置;在所述控制装置判断所述操作端产生非预期操作时,触发所述警示装置提示警示信息。
34、可选的,所述控制装置用于与主从映射模块通信连接,在所述控制装置判断所述操作端产生非预期操作时,所述控制装置用于驱动主从映射模块停止将所述操作端的动作映射至从端装置。
35、为解决上述技术问题,本发明还提供一种非预期操作检测系统,其包括:控制装置、设置于操作端上的应力传感器、关节角度传感器、关节速度传感器以及关节加速度传感器;所述非预期操作检测系统还包括设置于所述操作端上的关节力矩传感器或关节电机电流传感器;
36、所述应力传感器用于获取操作者与所述操作端的接触应力数据;所述关节角度传感器用于获取所述角度数据;所述关节速度传感器用于获取所述速度数据;所述关节加速度传感器用于获取所述加速度数据;
37、所述关节驱动力矩数据基于所述关节电机电流传感器所反馈的电流得到,或者,所述关节驱动力矩数据基于所述关节力矩传感器检测得到;
38、所述控制装置被配置为:利用所述角度数据、速度数据及加速度数据得到关节的计算力矩数据;基于所述计算力矩数据和所述关节驱动力矩数据得到所述操作端上的关节所受的外力矩数据;根据所述接触应力数据和所述外力矩数据得到所述操作者与所述操作端之间的操作状态;若所述操作状态为所述操作者对所述操作端施加的操作力矩数据与所述外力矩数据不相等,则判断所述操作端产生非预期操作。
39、为解决上述技术问题,本发明还提供一种手术机器人系统,其包括主端装置和从端装置,所述主端装置包括操作端,还包括如上所述的非预期操作检测系统。
40、为解决上述技术问题,本发明还提供一种可读存储介质,其上存储有程序,所述程序被执行时实现如上所述的非预期操作检测方法的步骤。
41、为解决上述技术问题,本发明还提供一种计算机设备,其包括处理器和如上所述的可读存储介质,所述处理器用于执行所述可读存储介质上存储的所述程序。
42、综上所述,在本发明提供的非预期操作检测方法、非预期操作检测系统、手术机器人系统、可读存储介质及计算机设备中,所述非预期操作检测方法包括:获取操作端及所述操作端邻接的操作区域的图像信息;获取所述操作端的至少一个关节的附加检测数据;根据所述图像信息和所述附加检测数据,基于预设算法判断所述操作端是否产生非预期操作。
43、如此配置,基于图像信息可以检测医生和周围障碍物的位置,并可获知手术过程中医生与操作端是否脱离,基于附加检测数据,也可获知医生与操作端是否脱离,进一步可获知操作端的运动是否是非预期操作引起的。图像信息和附加检测数据的双重检测提高了检测的可靠性,避免采用单一传感器的检测结果造成的状态误判。此外,基于附加检测数据还可以获知操作端在运动时是否受到非预期的外部干扰力。由此,可准确地判断操作端是否产生非预期操作,能有效避免手术过程中医生与操作端脱离导致操作端非预期运动且从端装置跟随而引发的手术事故,提升了机器人手术操作的安全性,保证了手术操作的可控性。
- 还没有人留言评论。精彩留言会获得点赞!