具有力传感检测和推力功能的椎间隙弹性撑开内固定装置
1.本发明涉及骨科手术医疗器械领域,更具体地,涉及一种具有力传感检测功能的椎间隙弹性撑开内固定装置。
背景技术:
2.随着老龄化社会的到来,腰椎骨折、腰椎间盘突出症的发病率逐年增加,需要手术解决的患者所占比重愈来愈大,逐渐成为脊柱外科手术主要病种,当前的脊柱外科手术一般是单侧椎弓根和双侧椎弓根两种方法。
3.公开号为cn202263044u的中国实用新型专利公开了一种经皮微创椎弓根钉棒内固定系统,包括椎弓根螺钉、纵连棒、用于确定置钉位置的定位套针和导针、用于扩大置钉通道的扩张芯、置钉导向套筒、上钉器、持棒器、撑开加压器、用于折断椎弓根螺钉的长臂的折臂器、上钉座;其中,所述椎弓根螺钉,包括钉体、钉座、两条可折断长臂和螺塞,钉体与钉座连接,两条可折断长臂对立地固定连接于钉座上形成u形结构,用于嵌入纵连棒,两条可折断长臂延伸至皮肤切口外,螺塞用于拧入两条可折断长臂的u形结构中压紧纵连棒。上述技术方案不具备脊椎受力检测功能,无法应对人体多变的内部环境以及复杂的外部环境的影响,一旦出现较大的变化,椎弓根系统将无法提供治疗效果,同时上述固定系统也不具备推力功能,无法实现对脊柱主动给力,治疗效果有限。
技术实现要素:
4.本发明的目的在于针对现有技术中的不足,提供一种具有力传感检测和推力功能的椎间隙弹性撑开内固定装置,稳定强、具有应力检测功能、可以持续牵引,有利于提高对腰椎疾病的治疗效果。
5.本发明的目的通过以下技术方案实现:
6.一种具有力传感检测和推力功能的椎间隙弹性撑开内固定装置,其特征在于,包括相连接的椎弓根钉和弹性棒;所述椎弓根钉包括钉体、钉座、可折断长臂和螺塞,所述钉体与钉座连接,可折断长臂对立地固定连接于钉座上形成用于嵌入弹性棒的u形结构,所述螺塞上端与钉体连接,螺塞下端与弹性棒连接;所述弹性棒包括芯棒、弹性元件和用于检测芯棒应力的传感器,所述弹性元件设置在芯棒外层,所述芯棒通过弹簧与传感器连接,所述传感器上连接有数据传输模块和电池模块,所述芯棒一端设有电动推杆模块。
7.进一步地,所述可折断长臂的内表面具有内螺纹,螺塞的外表面具有与可折断长臂内表面内螺纹匹配的外螺纹,螺塞的一端具有持塞孔,可折断长臂上靠近钉座的一端处设有凹切迹。
8.进一步地,所述弹性元件包括用于包覆芯棒的弹性部分和端部的非弹性部分,所述弹性元件内表面设有用于和芯棒连接的螺纹。
9.进一步地,所述螺塞下端设有用于与弹性棒连接固定的硬杆,所述芯棒和弹性元件上设有对应的连接孔。
10.进一步地,所述连接孔安装在芯棒的一端,所述芯棒另一端设有与螺钉固定的凸起。
11.进一步地,所述传感器包括承受被测应力的基体、检测被测应力的芯片和将被测应力传递到芯片的波纹膜片。
12.进一步地,所述芯片由4个感压电阻连成惠斯通电桥构成压力敏感元件。
13.进一步地,所述芯片检测到应力时将力学信号转换成可测量的电学信号,通过数据传输模块传输至移动终端,所述数据传输模块为蓝牙模块。
14.进一步地,所述可折断长臂上靠近凹切迹的一端套设有螺帽,所述螺帽上设有通孔。
15.进一步地,所述电动推杆模块包括依次连接的驱动电机、力传动单元和伸缩轴,所述伸缩轴沿芯棒轴向运动。
16.与现有技术相比,本发明的有益效果如下:
17.本发明通过传感器对弹性棒的受力情况进行检测,从而达到对人体脊椎受力情况的实时检测,便于医生和患者对椎间隙弹性撑开内固定系统的工作状况,脊椎生物力学康复情况进行实时掌握,有助于腰椎疾患的患者康复。
18.本发明通过电动推杆模块带动芯棒运动,实现装置的持续牵引和主动给力,使弹性元件处于对人体脊椎康复有临床最佳效果的结构状态,进而保证人体脊椎实时处于最佳的生物力学状态,促进脊椎的医学治疗与康复
附图说明
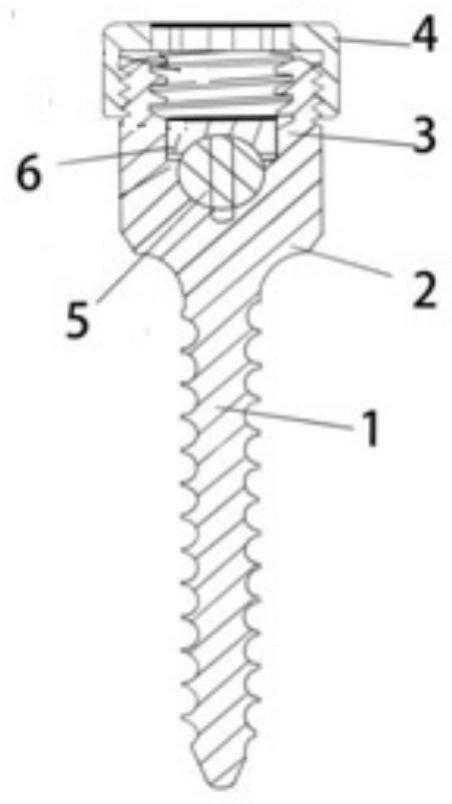
19.图1为椎弓根钉的结构示意图,
20.图2为椎弓根钉的结构示意图,
21.图3为椎弓根钉与弹性棒的连接示意图;
22.图4为螺塞上端的结构示意图,
23.图5为螺塞下端的结构示意图,
24.图6为盖帽的结构示意图,
25.图7为弹性棒的结构示意图,
26.图8为芯棒的结构示意图,
27.图9为传感器的结构示意图,
28.图10为实施例4中弹性元件的透视图,
29.图11为实施例4中芯棒的结构示意图;
30.其中,1为钉体、2为钉座、3为短臂、4为盖帽、5为弹性棒、6为螺塞、7为螺塞凸起、8为螺塞螺纹、9为硬杆、10为盖帽通孔、11为凹切迹、12为可折断长臂、51为芯棒、52为弹性元件、53为弹性部分、54为非弹性部分、521为传感器、522为实心棒体、523为通孔、524为弹簧、55为电动推杆模块。
具体实施方式
31.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基
于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
32.实施例1
33.如图1~9所示,本实施例提供一种具有力传感检测和推力功能的椎间隙弹性撑开内固定装置,包括相连接的椎弓根钉和弹性棒5,椎弓根钉包括钉体1、钉座2、可折断长臂12和螺塞6,钉体1与钉座2连接,可折断长臂12对立地固定连接于钉座2上形成用于嵌入弹性棒5的u形结构,所述螺塞6上端通过螺塞螺纹8与钉体1连接,螺塞6下端通过凸起7与弹性棒5上对应的槽孔连接,螺塞6上与弹性棒相接处设有对应的弧形凹槽。在可折断长臂12的内表面具有内螺纹,螺塞6的外表面具有与可折断长臂12内表面内螺纹匹配的外螺纹,螺塞6的一端具有持塞孔,可折断长臂12上靠近钉座2的一端处设有凹切迹11,凹切迹11将长臂分为短臂3与断臂12,短臂3连接于断臂12和钉座之间。可折断长臂12上靠近凹切迹11的一端套设有盖帽,所述盖帽上设有通孔10。
34.本实施例中,弹性棒5采用钛合金材料制成,包括芯棒51、弹性元件52和用于检测芯棒51应力的传感器521,弹性元件52设置在芯棒51外层,传感器521上连接有数据传输模块和电池模块,在芯棒一端设有电动推杆模块。弹性元件52包括用于包覆芯棒51的弹性部分53和端部的非弹性部分54,弹性部分53为弹簧状,可以伸缩,承受脊椎的拉压力,非弹性部分54与椎弓根钉连接固定。在弹性元件52内表面设有用于和芯棒51连接的螺纹。螺塞6下端设有用于与弹性棒5连接固定的硬杆9,芯棒51和弹性元件52上设有对应的连接孔。本实施例中的芯棒51的实心棒体522通过弹簧524与传感器521连接,连接孔523安装在芯棒51的一端,芯棒51另一端设有与螺钉固定的凸起。
35.传感器521为硅压阻式传感器521,分别包括承受被测应力的基体、检测被测应力的芯片和将被测应力传递到芯片的波纹膜片。其中芯片由4个感压电阻连成惠斯通电桥构成压力敏感元件,芯片检测到应力时将力学信号转换成可测量的电学信号,通过数据传输模块传输至移动终端。本实施例中所用数据传输模块为蓝牙模块。为了进一步提高应力检测效果,本技术可通过移动终端预设应力范围值,当受力情况超出预设范围值时进行预警,方便医护人员及时更换间隙弹性撑开内固定装置,提高对腰椎疾病的治疗效果。
36.实施例2
37.本实施例提供一种具有力传感检测和推力功能的椎间隙弹性撑开内固定装置,包括相连接的椎弓根钉和弹性棒5,椎弓根钉包括钉体1、钉座2、可折断长臂12和螺塞6,钉体1与钉座2连接,可折断长臂12对立地固定连接于钉座2上形成用于嵌入弹性棒5的u形结构,所述螺塞6上端通过螺塞螺纹8与钉体1连接,螺塞6下端通过凸起7与弹性棒5上对应的槽孔连接,螺塞6上与弹性棒相接处设有对应的弧形凹槽。在可折断长臂12的内表面具有内螺纹,螺塞6的外表面具有与可折断长臂12内表面内螺纹匹配的外螺纹,螺塞6的一端具有持塞孔,可折断长臂12上靠近钉座2的一端处设有凹切迹11,凹切迹11将长臂分为短臂3与断臂12,短臂3连接于断臂12和钉座之间。可折断长臂12上靠近凹切迹11的一端套设有盖帽,所述盖帽上设有通孔10。
38.本实施例中,弹性棒5采用钛合金材料制成,包括芯棒51、弹性元件52和用于检测芯棒51应力的传感器521,弹性元件52设置在芯棒51外层,传感器521上连接有数据传输模块和电池模块,在芯棒一端设有电动推杆模块。弹性元件52包括用于包覆芯棒51的弹性部
分53和端部的非弹性部分54,弹性部分53为弹簧状,可以伸缩,承受脊椎的拉压力,非弹性部分54与椎弓根钉连接固定。在弹性元件52内表面设有用于和芯棒51连接的螺纹。螺塞6下端设有用于与弹性棒5连接固定的硬杆9,芯棒51和弹性元件52上设有对应的连接孔。本实施例中的芯棒51的实心棒体522通过弹簧524与传感器521连接,连接孔523安装在芯棒51的一端,芯棒51另一端设有与螺钉固定的凸起。
39.传感器521为硅压阻式传感器521,分别包括承受被测应力的基体、检测被测应力的芯片和将被测应力传递到芯片的波纹膜片。其中芯片由4个感压电阻连成惠斯通电桥构成压力敏感元件,芯片检测到应力时将力学信号转换成可测量的电学信号,通过数据传输模块传输至移动终端。本实施例中所用数据传输模块为蓝牙模块。为了进一步提高应力检测效果,本技术可通过移动终端预设应力范围值,当受力情况超出预设范围值时进行预警,方便医护人员及时更换间隙弹性撑开内固定装置,提高对腰椎疾病的治疗效果。
40.本实施例提供的一种具有力传感检测和推力功能的椎间隙弹性撑开内固定装置的使用方法如下:
41.首先,将芯棒51、弹簧、硅压阻式传感器521相连,随后通过实心棒、传感器521的外螺纹与弹性元件52的内螺纹套设在一起,并且将弹性元件52上的槽孔与实心棒上的对齐,再将钉体1与钉座2紧紧相连,并将弹性棒5组装在椎弓根螺钉上,用螺塞6通过钉体1的内螺纹将弹性棒5初步固定在钉体1,其中一端的螺塞6下有一凸起可以与弹性棒5的槽孔充分连接,最后用盖帽将螺塞6和弹性棒5结合紧密。
42.实施例3
43.本实施例提供一种具有力传感检测和推力功能的椎间隙弹性撑开内固定装置,包括相连接的椎弓根钉和弹性棒5,椎弓根钉包括钉体1、钉座2、可折断长臂12和螺塞6,钉体1与钉座2连接,可折断长臂12对立地固定连接于钉座2上形成用于嵌入弹性棒5的u形结构,螺塞6上端通过螺塞螺纹8与钉体1连接,螺塞6下端通过凸起7与弹性棒5上对应的槽孔连接,螺塞6上与弹性棒相接处设有对应的弧形凹槽。在可折断长臂12的内表面具有内螺纹,螺塞6的外表面具有与可折断长臂12内表面内螺纹匹配的外螺纹,螺塞6的一端具有持塞孔,可折断长臂12上靠近钉座2的一端处设有凹切迹11,凹切迹11将长臂分为短臂3与断臂12,短臂3连接于断臂12和钉座之间。可折断长臂12上靠近凹切迹11的一端套设有盖帽,所述盖帽上设有通孔10。
44.本实施例中,弹性棒5采用钛合金材料制成,包括芯棒51、弹性元件52和用于检测芯棒51应力的传感器521,弹性元件52设置在芯棒51外层,传感器521上连接有数据传输模块和电池模块,在芯棒一端设有电动推杆模块。弹性元件52包括用于包覆芯棒51的弹性部分53和端部的非弹性部分54,弹性部分53为弹簧状,可以伸缩,承受脊椎的拉压力,非弹性部分54与椎弓根钉连接固定。在弹性元件52内表面设有用于和芯棒51连接的螺纹。螺塞6下端设有用于与弹性棒5连接固定的硬杆9,芯棒51和弹性元件52上设有对应的连接孔。本实施例中的芯棒51的实心棒体522通过弹簧524与传感器521连接,连接孔523安装在芯棒51的一端,芯棒51另一端设有与螺钉固定的凸起。
45.传感器521为硅压阻式传感器521,分别包括承受被测应力的基体、检测被测应力的芯片和将被测应力传递到芯片的波纹膜片。其中芯片由4个感压电阻连成惠斯通电桥构成压力敏感元件,芯片检测到应力时将力学信号转换成可测量的电学信号,通过数据传输
模块传输至移动终端。本实施例中所用数据传输模块为蓝牙模块。为了进一步提高应力检测效果,本技术可通过移动终端预设应力范围值,当受力情况超出预设范围值时进行预警,方便医护人员及时更换间隙弹性撑开内固定装置,提高对腰椎疾病的治疗效果。
46.本实施例中提供的一种具有力传感检测和推力功能的椎间隙弹性撑开内固定装置的测力工作过程如下:
47.当弹性棒5受到人体骨骼的拉伸或者挤压时,弹性棒5外层的弹性元件52也会随之拉伸或者压缩,从而带动传感器521与芯棒51中的弹簧膜片拉伸或压缩运动,弹簧的拉伸与压缩引起传感器521中的波纹膜片发生形变。当波纹膜片受到外界压力作用,波纹膜片将会将被测应力传递给芯片中的可以感受力学信号四个感压电阻,并将力学信号转换成可测量的电学信号,检测出弹性棒5的受力情况,最后通过嵌入在传感器521中的蓝牙模块将传感信号传输到给外界的移动终端,用于实时监测智能椎间隙弹性撑开内固定系统的受力情况,从而达到对人体脊椎受力情况的实时检测,便于医生和患者对椎间隙弹性撑开内固定系统的工作状况,脊椎生物力学康复情况进行实时掌握。
48.实施例4
49.本实施例提供一种具有力传感检测和推力功能的椎间隙弹性撑开内固定装置,包括相连接的椎弓根钉和弹性棒5,椎弓根钉包括钉体1、钉座2、可折断长臂12和螺塞6,钉体1与钉座2连接,可折断长臂12对立地固定连接于钉座2上形成用于嵌入弹性棒5的u形结构,螺塞6上端通过螺塞螺纹8与钉体1连接,螺塞6下端通过凸起7与弹性棒5上对应的槽孔连接,螺塞6上与弹性棒相接处设有对应的弧形凹槽。在可折断长臂12的内表面具有内螺纹,螺塞6的外表面具有与可折断长臂12内表面内螺纹匹配的外螺纹,螺塞6的一端具有持塞孔,可折断长臂12上靠近钉座2的一端处设有凹切迹11,凹切迹11将长臂分为短臂3与断臂12,短臂3连接于断臂12和钉座之间。可折断长臂12上靠近凹切迹11的一端套设有盖帽,所述盖帽上设有通孔10。
50.本实施例中,弹性棒5采用钛合金材料制成,包括芯棒51、弹性元件52和用于检测芯棒51应力的传感器521,弹性元件52设置在芯棒51外层,传感器521上连接有数据传输模块和电池模块,在芯棒一端设有电动推杆模块。弹性元件52包括用于包覆芯棒51的弹性部分53和端部的非弹性部分54,弹性部分53为弹簧状,可以伸缩,承受脊椎的拉压力,非弹性部分54与椎弓根钉连接固定。在弹性元件52内表面设有用于和芯棒51连接的螺纹。螺塞6下端设有用于与弹性棒5连接固定的硬杆9,芯棒51和弹性元件52上设有对应的连接孔。本实施例中的芯棒51的实心棒体522通过弹簧524与传感器521连接,连接孔523安装在芯棒51的一端,芯棒51另一端设有与螺钉固定的凸起。
51.传感器521为硅压阻式传感器521,分别包括承受被测应力的基体、检测被测应力的芯片和将被测应力传递到芯片的波纹膜片。其中芯片由4个感压电阻连成惠斯通电桥构成压力敏感元件,芯片检测到应力时将力学信号转换成可测量的电学信号,通过数据传输模块传输至移动终端。本实施例中所用数据传输模块为蓝牙模块。为了进一步提高应力检测效果,本技术可通过移动终端预设应力范围值,当受力情况超出预设范围值时进行预警,方便医护人员及时更换间隙弹性撑开内固定装置,提高对腰椎疾病的治疗效果。
52.为了提高对腰椎疾病的治疗效果,本实施例中电动推杆模块包括依次连接的驱动电机、力传动单元和伸缩轴,将电机的电能转换成伸缩轴的机械能量,驱动伸缩轴沿芯棒轴
向运动,可以持续牵引、主动给力。电动推杆模块上还设有用于供电的电源,和用于传输信号的蓝牙模块。具体地,电动推杆模块的工作过程如下:传感器将得到的相关力学数据后,判断当前脊椎受力状况是否符合人体脊柱生物力学的正常状态,再将受力信号传输给医疗电动推杆模块,医疗电动推杆模块根据需要驱动伸缩轴运动,使弹性元件处于对人体脊椎康复有临床最佳效果的结构状态,进而保证人体脊椎实时处于最佳的生物力学状态,促进脊椎的医学治疗与康复。
53.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
54.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1