图像获取组件的调节方法、装置及电子设备与流程
本技术涉及医疗器械,特别涉及图像获取组件的调节方法、装置及电子设备。
背景技术:
1、现有技术中有一些自动化设备的操作,需要用户在通过肉眼无法看见实时操作状况的情况下(例如操作结果发生在肉眼无法辨识的微小区域,如需要一定程度地放大后肉眼才能够辨识的操作结果;或者用户的位置不在能够看见操作结果的区域内,如处于不同的房间)操作该自动化设备上的操作工具动作。为此,通常为该可控的自动化设备配置了摄像头等图像获取组件采集实时操作状况,并反馈至用户。
2、为了能够更准确地查看图像获取组件采集的实时操作状况,用户通常需要在操控操作工具动作的过程中,时常地调整图像获取组件的位姿以便能够以最佳的角度采集实时操作状况。这使得用户的操作自动化设备动作以完成任务的过程较为繁琐,任务的执行时间较长。
技术实现思路
1、本技术实施方式的目的是提供图像获取组件的调节方法、装置及电子设备,以解决用户在通过肉眼无法看见实时操作状况的情况下,需要一边操纵自动化设备一边调节图像获取组件所导致的操作过程较为繁琐,任务的执行时间较长的问题。
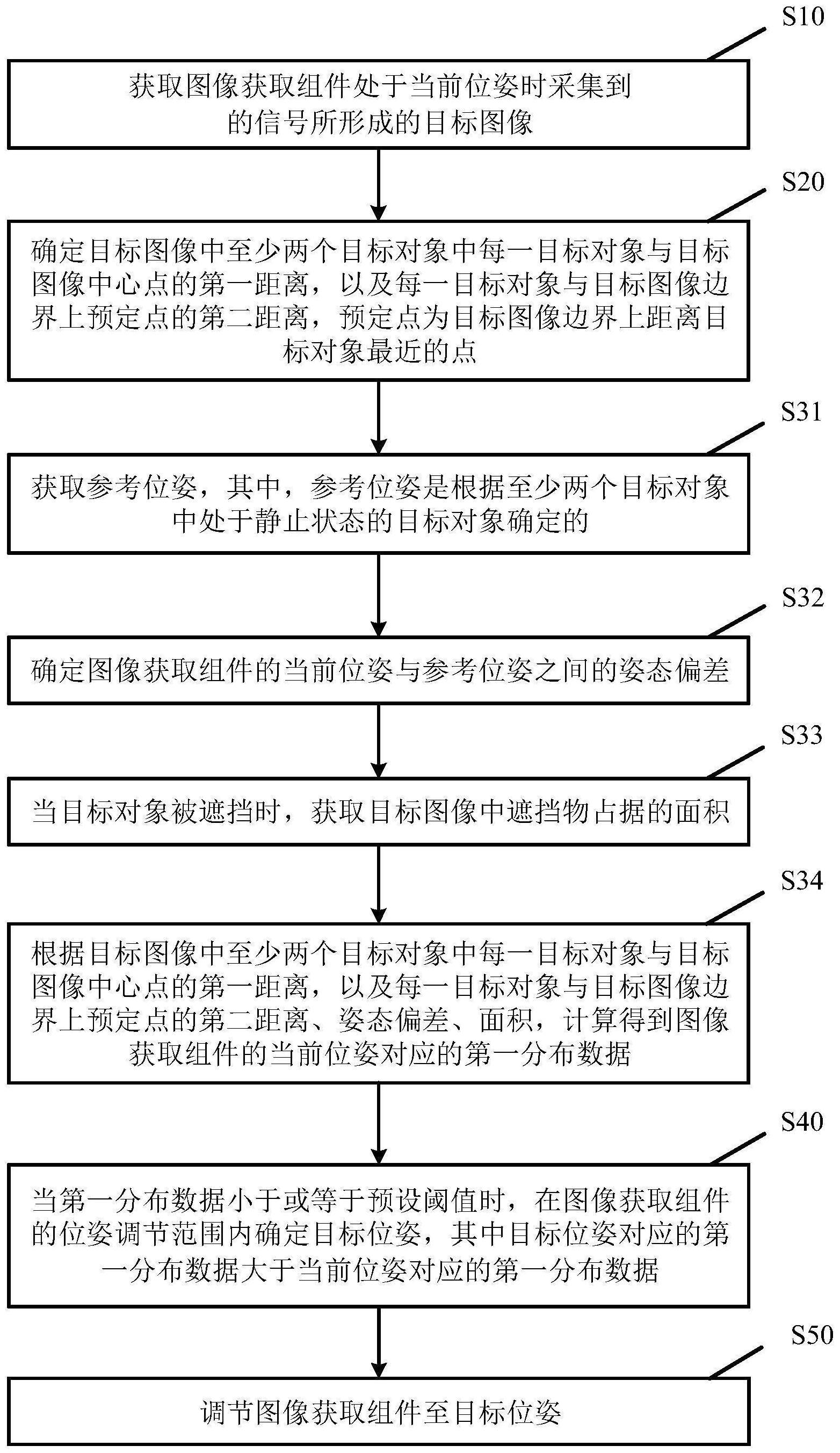
2、为解决上述技术问题,本说明书第一方面提供一种图像获取组件的调节方法,包括:获取图像获取组件处于当前位姿时采集到的信号所形成的目标图像;确定所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离;所述预定点为所述目标图像边界上距离目标对象最近的点;根据所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离,计算得到所述图像获取组件的当前位姿对应的第一分布数据;当所述第一分布数据小于或等于预设阈值时,在所述图像获取组件的位姿调节范围内确定目标位姿,并调节所述图像获取组件至所述目标位姿,其中所述目标位姿对应的第一分布数据大于当前位姿对应的第一分布数据。
3、在一些实施例中,根据所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离,计算得到所述图像获取组件的当前位姿对应的第一分布数据,包括:获取参考位姿,其中,所述参考位姿是根据所述至少两个目标对象中处于静止状态的目标对象确定的;确定图像获取组件的当前位姿与所述参考位姿之间的姿态偏差;根据所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离、所述姿态偏差,计算得到所述图像获取组件的当前位姿对应的第一分布数据。
4、在一些实施例中,根据所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离、所述姿态偏差,计算得到所述图像获取组件的当前位姿对应的第一分布数据,包括:当目标对象被遮挡时,获取所述目标图像中遮挡物占据的面积;根据所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离、所述姿态偏差、所述面积,计算得到所述图像获取组件的当前位姿对应的第一分布数据。
5、在一些实施例中,根据所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离、所述姿态偏差、所述面积,计算得到所述图像获取组件的当前位姿对应的第一分布数据,包括:对所述目标图像中至少两个目标图像中每一目标对象与所述目标图像中心点的第一距离进行加权求和计算,得到第一数值;对所述目标图像中至少两个目标图像中每一目标对象与所述目标图像边界上预定点的第二距离进行加权求和计算,得到第二数值;计算所述姿态偏差的范数,得到第三数值;根据所述第一数值、所述第二数值、所述第三数值、所述面积,计算得到所述图像获取组件的当前位姿对应的第一分布数据。
6、在一些实施例中,在调节所述图像获取组件至所述目标位姿之前,还包括:根据所述目标位姿进行路径规划,得到所述图像获取组件从当前位姿调节至所述目标位姿过程中的调节路径;根据路径规划的结果,判断所述图像获取组件从所述当前位姿调节至所述目标位姿的过程中是否会与所述至少两个目标对象中的可移动对象碰撞;当所述图像获取组件不会与可移动对象碰撞时,根据所述路径规划的结果,自动调节所述图像获取组件至所述目标位姿。
7、在一些实施例中,确定所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离,包括:按照以下方式确定所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离:根据所述图像获取组件采集到的历史信号所形成的多个历史图像,确定当前目标对象的运动轨迹;根据所述运动轨迹确定当前目标对象相对于所述目标图像中心点的第一预计位置;对所述目标图像中以第一预计位置为中心的、预定范围内的图像区域进行识别;当识别到当前目标对象时,确定所识别到的当前目标对象与所述目标图像中心点的第一距离、与所述目标图像边界上预定点的第二距离。
8、在一些实施例中,在获取图像获取组件处于当前位姿时采集到的信号所形成的目标图像之后,还包括:当所述目标图像中不存在目标对象时,确定所述目标对象在所述目标图像外的第二预计位置;根据所述第二预计位置进行路径规划,得到所述图像获取组件从当前位姿朝向所述第二预计位置的调节路径;根据路径规划结果,产生所述图像获取组件的调节方向的提示信息,以便操作者通过位姿调节操纵器按照所述调节方向调节所述图像获取组件的位姿。
9、在一些实施例中,在根据第二预计位置进行路径规划,得到所述图像获取组件从当前位姿朝向所述第二预计位置的调节路径之后,还包括:在所述图像获取组件的位姿调节操纵器上反馈控制阻力,且所述位姿调节操纵器的第一操作方向上的控制阻力小于其他操作方向上的控制阻力,其中,所述第一操作方向为路径规划结果中所述图像获取组件的调节方向所对应的操作方向,所述其他操作方向为预设操作方向集合中除所述第一操作方向外的操作方向。
10、在一些实施例中,在产生所述图像获取组件的调节方向的提示信息之后,还包括:在通过位姿调节操纵器调节所述图像获取组件的位姿的过程中,根据所述图像获取组件采集到的信号所形成的图像实时计算所述图像获取组件的位姿对应的第二分布数据;当所述图像获取组件的位姿对应的第二分布数据达到预定范围时,在所述图像获取组件的位姿调节范围内确定目标位姿,并调节所述图像获取组件至所述目标位姿。
11、在一些实施例中,所述第一分布数据和所述第二分布数据的计算方式相同。
12、在一些实施例中,根据所述图像获取组件采集到的信号所形成的图像实时计算所述图像获取组件的位姿对应的第二分布数据,包括:获取图像获取组件在第一时刻采集到的信号所形成的第一图像;获取所述第一图像中至少两个目标对象中每一目标对象与所述第一图像中心点的第一距离,以及每一目标对象与所述第一图像边界上预定点的第二距离;其中,当目标对象不在所述第一图像中时,确定所述目标对象的第二预计位置与所述第一图像中心点的第一距离、所述目标对象的第二预计位置与所述第一图像边界上预定点的第二距离;根据所述第一距离、所述第二距离,计算得到所述图像获取组件在第一时刻的位姿对应的第二分布数据。
13、在一些实施例中,根据所述第一距离、所述第二距离,计算得到所述图像获取组件在第一时刻的位姿对应的第二分布数据,包括:根据所述第一距离、所述第二距离,形成在第一时刻的位姿对应的第一分布矩阵;确定图像获取组件在第二时刻采集到的信号所形成的第二图像及所述至少两个目标对象的预估位置,并确定所述至少两个目标对象的预估位置分别与所述第二图像中心点的第一距离、分别与所述第二图像边界上预定点的第二距离;根据所述至少两个目标对象的预估位置分别与所述第二图像中心点的第一距离、分别与所述第二图像边界上预定点的第二距离,形成在第二时刻的位姿对应的第二分布矩阵;根据所述第一分布矩阵、所述第二分布矩阵,计算得到所述图像获取组件在第一时刻的位姿对应的第二分布数据。
14、在一些实施例中,所述第一分布矩阵中的元素还包括:当目标对象被遮挡时,所述第一图像中遮挡物占据的面积;和/或,在第一时刻的位姿与参考位姿之间的姿态偏差,其中,所述参考位姿是预先根据所述至少两个目标对象中处于静止状态的目标对象确定的。
15、在一些实施例中,所述图像获取组件为内窥镜镜头或超声探测器。
16、本说明书第二方面提供一种图像获取组件的调节装置,包括:获取单元,用于获取图像获取组件处于当前位姿时采集到的信号所形成的目标图像;第一确定单元,用于确定所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离;第一计算单元,用于根据所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离,计算得到所述图像获取组件的当前位姿对应的第一分布数据;第二确定单元,用于当所述第一分布数据小于或等于预设阈值时,在所述图像获取组件的位姿调节范围内确定目标位姿,其中所述目标位姿对应的第一分布数据大于当前位姿对应的第一分布数据;调节单元,用于调节所述图像获取组件至所述目标位姿。
17、在一些实施例中,所述第一计算单元包括:第一获取子单元,用于获取参考位姿,其中,所述参考位姿是根据所述至少两个目标对象中处于静止状态的目标对象确定的;第一确定子单元,用于确定图像获取组件的当前位姿与所述参考位姿之间的姿态偏差;第一计算子单元,用于根据所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离、所述姿态偏差,计算得到所述图像获取组件的当前位姿对应的第一分布数据。
18、在一些实施例中,所述第一计算子单元包括:第二获取子单元,用于当目标对象被遮挡时,获取所述目标图像中遮挡物占据的面积;第二计算子单元,用于根据所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离、所述姿态偏差、所述面积,计算得到所述图像获取组件的当前位姿对应的第一分布数据。
19、在一些实施例中,所述第二计算子单元按照以下方法计算得到所述图像获取组件的当前位姿对应的第一分布数据:对所述目标图像中至少两个目标图像中每一目标对象与所述目标图像中心点的第一距离进行加权求和计算,得到第一数值;对所述目标图像中至少两个目标图像中每一目标对象与所述目标图像边界上预定点的第二距离进行加权求和计算,得到第二数值;计算所述姿态偏差的范数,得到第三数值;根据所述第一数值、所述第二数值、所述第三数值、所述面积,计算得到所述图像获取组件的当前位姿对应的第一分布数据。
20、在一些实施例中,所述装置还包括:第一规划单元,用于根据所述目标位姿进行路径规划,得到所述图像获取组件从当前位姿调节至所述目标位姿过程中的调节路径;判断单元,用于根据路径规划的结果,判断所述图像获取组件从所述当前位姿调节至所述目标位姿的过程中是否会与所述至少两个目标对象中的可移动对象碰撞;当所述图像获取组件不会与可移动对象碰撞时,所述调节单元执行所述调节所述图像获取组件至所述目标位姿。
21、在一些实施例中,所述第一确定单元包括:按照以下方式确定所述目标图像中至少两个目标对象中每一目标对象与所述目标图像中心点的第一距离,以及每一目标对象与所述目标图像边界上预定点的第二距离:第二确定子单元,用于根据所述图像获取组件采集到的历史信号所形成的多个历史图像,确定当前目标对象的运动轨迹;第三确定子单元,用于根据所述运动轨迹确定当前目标对象相对于所述目标图像中心点的第一预计位置;识别子单元,用于对所述目标图像中以第一预计位置为中心的、预定范围内的图像区域进行识别;第四确定子单元,用于当识别到当前目标对象时,确定所识别到的当前目标对象与所述目标图像中心点的第一距离、与所述目标图像边界上预定点的第二距离。
22、在一些实施例中,所述装置还包括:第二确定单元,用于当所述目标图像中不存在目标对象时,确定所述目标对象在所述目标图像外的第二预计位置;第二规划单元,用于根据所述第二预计位置进行路径规划,得到所述图像获取组件从当前位姿朝向所述第二预计位置的调节路径;提示单元,用于根据路径规划结果,产生所述图像获取组件的调节方向的提示信息,以便操作者通过位姿调节操纵器按照所述调节方向调节所述图像获取组件的位姿。
23、在一些实施例中,所述装置还包括:力反馈单元,用于在所述图像获取组件的位姿调节操纵器上反馈控制阻力,且所述位姿调节操纵器的第一操作方向上的控制阻力小于其他操作方向上的控制阻力,其中,所述第一操作方向为路径规划结果中所述图像获取组件的调节方向所对应的操作方向,所述其他操作方向为预设操作方向集合中除所述第一操作方向外的操作方向。
24、在一些实施例中,所述装置还包括:第二计算单元,用于在通过位姿调节操纵器调节所述图像获取组件的位姿的过程中,根据所述图像获取组件采集到的信号所形成的图像实时计算所述图像获取组件的位姿对应的第二分布数据;所述第二确定单元和所述调节单元,用于当所述图像获取组件的位姿对应的第二分布数据达到预定范围时,在所述图像获取组件的位姿调节范围内确定目标位姿,并调节所述图像获取组件至所述目标位姿。
25、在一些实施例中,所述第一分布数据和所述第二分布数据的计算方式相同。
26、在一些实施例中,所述第二计算单元包括:第三获取子单元,用于获取图像获取组件在第一时刻采集到的信号所形成的第一图像;第四获取子单元,用于获取所述第一图像中至少两个目标对象中每一目标对象与所述第一图像中心点的第一距离,以及每一目标对象与所述第一图像边界上预定点的第二距离;其中,当目标对象不在所述第一图像中时,确定所述目标对象的第二预计位置与所述第一图像中心点的第一距离、所述目标对象的第二预计位置与所述第一图像边界上预定点的第二距离;第三计算子单元,用于根据所述第一距离、所述第二距离,计算得到所述图像获取组件在第一时刻的位姿对应的第二分布数据。
27、在一些实施例中,所述第三计算子单元包括:第一形成子单元,用于根据所述第一距离、所述第二距离,形成在第一时刻的位姿对应的第一分布矩阵;第五确定子单元,用于确定图像获取组件在第二时刻采集到的信号所形成的第二图像及所述至少两个目标对象的预估位置,并确定所述至少两个目标对象的预估位置分别与所述第二图像中心点的第一距离、分别与所述第二图像边界上预定点的第二距离;第二形成子单元,用于根据所述至少两个目标对象的预估位置分别与所述第二图像中心点的第一距离、分别与所述第二图像边界上预定点的第二距离,形成在第二时刻的位姿对应的第二分布矩阵;第四计算子单元,用于根据所述第一分布矩阵、所述第二分布矩阵,计算得到所述图像获取组件在第一时刻的位姿对应的第二分布数据。
28、在一些实施例中,所述第一分布矩阵中的元素还包括:当目标对象被遮挡时,所述第一图像中遮挡物占据的面积;和/或,在第一时刻的位姿与参考位姿之间的姿态偏差,其中,所述参考位姿是预先根据所述至少两个目标对象中处于静止状态的目标对象确定的。
29、在一些实施例中,所述图像获取组件为内窥镜镜头或超声探测器。
30、本说明书第三方面提供一种电子设备,包括:存储器和处理器,所述处理器和所述存储器之间互相通信连接,所述存储器中存储有计算机指令,所述处理器通过执行所述计算机指令,从而实现第一方面任一所述方法的步骤。
31、本说明书第四方面一种计算机存储介质,所述计算机存储介质存储有计算机程序指令,所述计算机程序指令被执行时实现第一方面任一所述方法的步骤。
32、本说明书所提供的图像获取组件的调节方法、装置及电子设备,基于图像获取组件处于当前位姿时采集到的信号所形成的目标图像,确定出至少两个目标对象中每一目标对象与目标图像中心点的第一距离,以及每一目标对象与目标图像边界上预定点的第二距离,根据第一距离、第二距离,计算图像获取组件的当前位姿对应的第一分布数据,从而对当前位姿对应的目标图像的分布状况进行了量化计算,便于计算机或电子设备量化评定当前位姿对应的视野的好坏;本方案在第一分布数据小于或等于预设阈值时,可以在位姿调节范围内自动搜寻第一分布数据大于当前位姿对应的第一分布数据的目标位姿,即寻找视野更好的目标位姿。由此可见,本方案能够实现图像获取组件的自动调节,并且该自动调节方式能够使得图像获取组件的视野更好,从而使得操作者只需操控操作工具即可,无需在操作工具与图像获取组件的操控之间来回切换,能够减少操作者的工作,并缩短操作任务的执行时长。
- 还没有人留言评论。精彩留言会获得点赞!