移动式C臂X光机术中透视辅助定位装置和方法
移动式c臂x光机术中透视辅助定位装置和方法
技术领域
1.本发明涉及医用影像辅助定位设备领域,尤其是一种移动式c臂x光机术中透视辅助定位装置和方法。
背景技术:
2.相关技术中,动式c形臂x光机具有术中透视、实时成像的优点,广泛应用于各科临床手术。动式c形臂x光机将一个x线发生器与一个影像增强器分别集成在一个“c”形臂状框架结构的两端,影像增强器输出的影像通过光电耦合的方式传送到电视摄像机中,形成视频信号。该视频信号可实时地显示在监视器上,以便医生看到患者的影像信息及其情况,辅助医生进行定位及相应的治疗。
3.c臂x光机透视时,病人的患处位于球管与影像增强器之间,球管产生x线呈束状穿透人体的目标部位投射于c形臂的影像增强器上,所形成一个与目标部位有一定放大比率的图像。目标透视部位越近球管,即目标透视区域越小,图像放大比率越大,反之,标透视区域越近影像增强器,目标透视区域就越大,图像放大比率越小。透视操作过程中,c形臂操作者只能根据目测判定目标区域,手动调整c形臂的位置及高度,根据透视成像范围及效果进行相应调整及再透视,反复透视会增加手术时间及x射线对人体产生的电离辐射损伤,从而增加病人手术风险。
技术实现要素:
4.本发明旨在至少解决现有技术中存在的技术问题之一。为此,本发明提出一种移动式c臂x光机术中透视辅助定位装置和方法,能够有效降低病人手术风险。
5.一方面,本发明实施例提供了一种移动式c臂x光机术中透视辅助定位装置,包括:
6.环形固定套,所述环形固定套的周径和形状与所述移动式c臂x光机中影像增强器的周径和形状对应;
7.第一激光发射模组,所述第一激光发射模组固定于所述环形固定套上;所述第一激光发射模组的光线射向所述移动式c臂x光机的球管位置,用于在透视目标区域中央形成“#”字形中央区域,所述“#”字形中央区域与实际治疗过程的透视区域的中央位置对应;
8.第二激光发射模组,所述第二激光发射模组固定于所述环形固定套上;所述第二激光发射模组的光线射向所述移动式c臂x光机的球管位置,用于在透视目标区域上形成点状标记环形外圈,所述点状标记环形外圈与实际治疗过程的透视区域的外周对应。
9.在一些实施例中,所述环形固定套包括:
10.第一对称部件,所述第一对称部件包括第一环形槽和第一槽盖板,所述第一环形槽与所述第一槽盖板通过螺钉固定;
11.第二对称部件,所述第二对称部件包括第二环形槽和第二槽盖板,所述第二环形槽与所述第二槽盖板通过螺钉固定;所述第二对称部件的第一端通过弹性紧固带与所述第一对称部件的第一端连接,所述第二对称部件的第二端通过螺钉螺母与所述第一对称部件
的第二端连接。
12.在一些实施例中,所述第一环形槽和所述第二环形槽内分别设有2个第一圆柱孔;
13.所述第一激光发射模组包括4个第一激光发射器;所述4个第一激光发射器分别设置于所述第一圆柱孔上。
14.在一些实施例中,所述第一圆柱孔在所述环形固定套上的水平间距为90度,所述第一圆柱孔与所述第一槽盖板或所述第二槽盖板的垂直夹角为45度。
15.在一些实施例中,所述第一环形槽和所述第二环形槽内分别设有6个第二圆柱孔;
16.所述第二激光发射模组包括12个第二激光发射器;所述12个第二激光发射器分别设置于所述第二圆柱孔上。
17.在一些实施例中,所述第二圆柱孔在所述环形固定套上的水平间距为30度。
18.在一些实施例中,所述装置还包括供电源模块;所述第一环形槽和所述第二环形槽内均设有电池槽;所述电源模块设置于所述电池槽内。
19.在一些实施例中,所述第一环形槽和所述第二环形槽内均设有充电外接口,所述电源模块通过所述充电外接口连接外部电源。
20.在一些实施例中,所述装置还包括:
21.控制模块,所述控制模块设置于所述第一环形槽或所述第二环形槽内,用于控制所述电源模块输送到所述第一激光发射模组或所述第二激光发射模组的电能大小。
22.另一方面,本发明实施例提供了一种移动式c臂x光机术中透视辅助定位方法,包括以下步骤:
23.确定所述定位装置安装于所述移动式c臂x光机后,控制所述定位装置进入工作状态;
24.控制所述定位装置的第一激光发射模组的光线,在所述移动式c臂x光机的透视目标区域中央形成“#”字形中央区域;
25.根据所述“#”字形中央区域确定实际治疗过程的透视区域的中央位置;
26.控制所述定位装置的第二激光发射模组的光线,在所述移动式c臂x光机的透视目标区域上形成点状标记环形外圈;
27.根据所述点状标记环形外圈确定实际治疗过程的透视区域的外周。
28.本发明实施例提供的一种移动式c臂x光机术中透视辅助定位装置,具有如下有益效果:
29.本发明通过设置由环形固定套、第一激光发射模组和第二激光发射模组组成的定位装置,并且,环形固定套的外周径和形状与所述移动式c臂x光机中影像增强器的外周径和形状对应,使得在使用过程中,将环形固定套固定于移动式c臂x光机中影像增强器上后,环形固定套上的第一激光发射模组可以在透视目标区域中央形成“#”字形中央区域,环形固定套上的第二激光发射模组可以在透视目标区域上形成点状标记环形外圈,使得医生可以根据“#”字形中央区域确定实际治疗过程的透视区域的中央位置,以及根据点状标记环形外圈确定实际治疗过程的透视区域的外周,从而无需医生在治疗过程中反复调节c形臂位置和高度,缩短手术时间,减少x射线对患者的照射时间,有效降低病人手术风险。
30.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
31.下面结合附图和实施例对本发明做进一步的说明,其中:
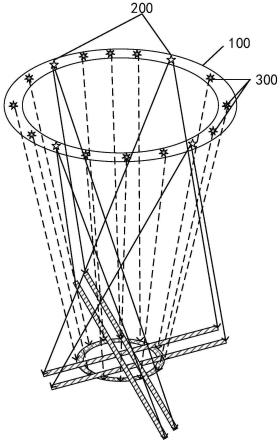
32.图1为本发明实施例一种移动式c臂x光机术中透视辅助定位装置的示意图;
33.图2为本发明实施例一种环形固定套的结构示意图;
34.图3为本发明实施例一种环形固定套的爆炸图;
35.图4为本发明实施例一种移动式c臂x光机术中透视辅助定位方法的流程图。
具体实施方式
36.下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本发明,而不能理解为对本发明的限制。
37.在本发明的描述中,需要理解的是,涉及到方位描述,例如上、下、前、后、左、右等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
38.在本发明的描述中,若干的含义是一个以上,多个的含义是两个以上,大于、小于、超过等理解为不包括本数,以上、以下、以内等理解为包括本数。如果有描述到第一、第二只是用于区分技术特征为目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量或者隐含指明所指示的技术特征的先后关系。
39.本发明的描述中,除非另有明确的限定,设置、安装、连接等词语应做广义理解,所属技术领域技术人员可以结合技术方案的具体内容合理确定上述词语在本发明中的具体含义。
40.本发明的描述中,参考术语“一个实施例”、“一些实施例”、“示意性实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
41.参照图1,本发明实施例提供了一种移动式c臂x光机术中透视辅助定位装置,包括:
42.环形固定套100,所述环形固定套的周径和形状与所述移动式c臂x光机中影像增强器的周径和形状对应;具体地,当环形固定套固定于影像增强器的外周时,环形固定套的内周径和形状与影像增强器的外周径和形状相同;当环形固定套固定于影像增强器的整下方时,环形固定套的外周径和形状与影像增强器的外周径和形状相同;
43.第一激光发射模组200,所述第一激光发射模组固定于所述环形固定套上;所述第一激光发射模组的光线射向所述移动式c臂x光机的球管位置,用于在透视目标区域中央形成“#”字形中央区域,所述“#”字形中央区域与实际治疗过程的透视区域的中央位置对应;
44.第二激光发射模组300,所述第二激光发射模组固定于所述环形固定套上;所述第二激光发射模组的光线射向所述移动式c臂x光机的球管位置,用于在透视目标区域上形成点状标记环形外圈,所述点状标记环形外圈与实际治疗过程的透视区域的外周对应。
45.在本技术实施例中,移动式c臂x光机由c臂、影像增强器和球管组成,影像增强器和球管分别设置于c臂的两个端点上,并且,影像增强器和球管为正对设置。在本实施例的应用过程中,先将本实施例的辅助定位装置固定于所述影像增强器的外周上,使辅助定位装置能够准确确定实际目标透视区域的中心位置和周围,从而提高透视的准确性。具体地,当辅助定位装置安装于影像增强器的外周后,控制辅助定位装置进入工作状态,如图1所示,控制辅助定位装置的第一激光发射模组的激光射向球管方向,并在透视目标区域中央形成“#”字形中央区域,该“#”字形中央区域与实际治疗过程的透视区域的中央位置对应,从而使得医生可以根据“#”字形中央区域确定透视过程中的中心位置;同时,控制第二激光发射模组的激光射向球管方向,并在在透视目标区域上形成点状标记环形外圈,该点状标记环形外圈可以随着透视目标区域变化而变化,从而可以与实际治疗过程的透视区域的外周对应,使得医生可以根据点状标记环形外圈确定当前透视区域的外周范围。由此可知,本实施例在应用过程中,医生无需反复调节移动式c臂x光机的位置和高度,从而能够有效减少x射线对患者的损伤,并且,医生在治疗之前,即能通过本实施例的辅助定位装置确定患者透视区域的中心位置和外周位置,从而能够有效缩短治疗时间,降低病人手术风险。
46.在本技术实施例中,如图2所示,所述环形固定套包括第一对称部件110和第一对称部件120。其中,如图3所示,所述第一对称部件包括第一环形槽111和第一槽盖板112,所述第一环形槽111与所述第一槽盖板112通过螺钉固定;所述第二对称部件包括第二环形槽121和第二槽盖板122,所述第二环形槽121与所述第二槽盖板122通过螺钉固定。所述第二对称部件的第一端通过弹性紧固带131与所述第一对称部件的第一端连接,所述第二对称部件的第二端通过螺钉螺母132与所述第一对称部件的第二端连接。具体地,第一环形槽和第二环形槽内均设有放置螺钉的固定柱141,第一槽盖板和第二槽盖板上设有与所述第三固定住适配的固定孔142。在完成环形固定套内器件的设置后,可以通过螺钉螺母在固定柱和固定孔上进行固定环形槽和槽盖板,也可以在需要对环形固定套内器件进行更换或维修时,拆除固定柱和固定孔上的螺钉螺母后,即能拆开环形槽和槽盖板,从而便于工作人员的操作过程。在应用过程中,当需要将辅助定位装置固定于移动式c臂x光机中影像增强器上时,将环形固定套套接在影像增强器外周后,通过螺钉螺母固定环形固定套的两个对称部件;当需要取下辅助定位装置时,拆除螺钉螺母后,即能将两个对称部件的第二端松开,从而便于工作人员取下辅助定位装置。
47.在本技术实施例中,如图2所示,所述第一环形槽和所述第二环形槽内分别设有2个第一圆柱孔151;所述第一激光发射模组包括4个第一激光发射器;所述4个第一激光发射器分别设置于所述第一圆柱孔151上。具体地,第一圆柱孔的内径可以设置为5.2cm,使第一激光发射器可以固定在第一圆柱孔内部。所述第一圆柱孔在所述环形固定套上的水平间距为90度,即在环形固定套上每隔90度设置一个第一圆柱孔。所述第一圆柱孔与所述第一槽盖板或所述第二槽盖板的垂直夹角为45度并且,第一激光发射器可以采用“一”字型激光发射器,即该激光发射器可以在照射位置形成一个“一”字。当4个第一圆柱孔内都设置有一个“一”字型激光发射器后,可以在指定区域上形成一个“#”字。在本技术实施例中,“一”字型激光发射器可以采用连续输出10000小时、输出波长为650nm(+/-5nm)、输出功率小于5mw、射程小于5m、光斑形状或直径为一字型、最小线宽小于1.0mm、1m处线宽小于3mm、光线扩散角大于90度的激光发射器。具体地,采用玻璃柱状一字线镜片,可以使得到的光线更均匀。
48.在本技术实施例中,如图2所示,所述第一环形槽和所述第二环形槽内分别设有6个第二圆柱孔152;所述第二激光发射模组包括12个第二激光发射器;所述12个第二激光发射器分别设置于所述第二圆柱孔152上。具体地,所述第二圆柱孔152在所述环形固定套上的水平间距为30度,即在环形固定套上每隔30度设置一个第二圆柱孔152,第二圆柱孔的内径可以设置为4.1cm,从而可以将直径为3.0cm的点状激光发射器固定在第二圆柱孔内。当所有第二圆柱孔内分别放置有一个点状激光发射器后,12个点状激光发射器可以在指定区域上形成一个点状环形外圈。如图1所示,由于12个点状激光发射器都是射向球管位置,因此,12个点状激光发射器在透视目标区域上可以跟随实际投射区域的变化而变化。在本技术实施例中,点状激光发射器可以采用输出波长为650nm、输出功率小于5mw、射程小于100m且光斑形状或直径在10m处光点小于18mm的激光发射器。其中,由于输出功率小于5mw,因此,在工作过程中,对人体无伤害。
49.在本技术实施例中,如图2所示,所述装置还包括供电源模块、充电外接口162和控制模块;所述第一环形槽和所述第二环形槽内均设有电池槽161;所述电源模块设置于所述电池槽161内。所述充电外接口162设置于所述第一环形槽和所述第二环形槽内;所述电源模块通过所述充电外接口连接外部电源。所述控制模块设置于所述第一环形槽或所述第二环形槽内,用于控制所述电源模块输送到所述第一激光发射模组或所述第二激光发射模组的电能大小。
50.在本实施例中,第一环形槽和所述第二环形槽可以采用高分子聚乙烯材料进行数据机床精密3d打印得到。电源模块可以采用储能电池。当电源模块内还有电能时,可以通过电源模块为辅助定位装置的其他功能部件提供工作电能;当当电源模块内没有电能时,可以通过充电外接口连接外部电源,从而通过外部电源为辅助定位装置的其他功能部件提供工作电能,以及对储能电池进行充电。控制模块可以采用集成的控制芯片或控制部件,该控制模块可以控制电源模块的工作过程,从而控制第一激光发射模组和第二激光发射模组的工作状态。充电外接口可以采用5v充电器安卓口充电模块板。在应用过程中,4个“一”字形激光及12个点状激光安装于相应的圆柱孔,两个安卓口充电模块板micro接口用板分别固定于两侧部件中电池槽内,并用电路板固定粘胶固定,连接储电电容后,接遥控接收器并匹配遥控开关,分别将两侧16个激光组(分别为6点状+2个一字状)作并联接电。控制模块在控制过程中,可单独控制一侧或两侧同时控制,电路工作时,在手术区域目标视野中,形外周12个点状外缘标记,同时4个“一”字形激光器,在透视视野中央形成一个“#”字标记。当确定透视时,在实际目标区域形成一个相匹配的定位区域,从而可以确定实际透视区域的外周及中央,提高了透视定位的便利性及准确性。
51.如图4所示,本发明实施例提供了一种移动式c臂x光机术中透视辅助定位方法,该方法应用于图1所示的辅助定位装置,具体地,如图4所示,本实施例包括但不限于以下步骤:
52.步骤410、确定所述定位装置安装于所述移动式c臂x光机后,控制所述定位装置进入工作状态;
53.步骤420、控制所述定位装置的第一激光发射模组的光线,在所述移动式c臂x光机的透视目标区域中央形成“#”字形中央区域;
54.步骤430、根据所述“#”字形中央区域确定实际治疗过程的透视区域的中央位置;
55.步骤440、控制所述定位装置的第二激光发射模组的光线,在所述移动式c臂x光机的透视目标区域上形成点状标记环形外圈;
56.步骤450、根据所述点状标记环形外圈确定实际治疗过程的透视区域的外周。
57.本发明装置实施例的内容均适用于本方法实施例,本方法实施例所具体实现的功能与上述装置实施例相同,并且达到的有益效果与上述装置达到的有益效果也相同。
58.此外,本发明实施例还提供了一种计算机程序产品或计算机程序,该计算机程序产品或计算机程序包括计算机指令,该计算机指令存储在计算机可读存介质中。计算机设备的处理器可以从计算机可读存储介质读取该计算机指令,处理器执行该计算机指令,使得该计算机设备执行图4所示的动式c臂x光机术中透视辅助定位方法。
59.上面结合附图对本发明实施例作了详细说明,但是本发明不限于上述实施例,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。此外,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1