一种人工椎间盘三维运动的体外测试系统及测试方法
1.本发明涉及人工椎间盘运动度测试技术领域,尤其涉及一种人工椎间盘三维运动的体外测试系统及测试方法。
背景技术:
2.退行性椎间盘疾病导致的下腰痛已经成为全球主要的公共卫生问题,使得公共医疗支出较大并给患者及其家庭带来沉重的经济负担。
3.植入人工椎间盘是有效治疗退行性椎间盘疾病的一种外科手术方式且能够恢复脊柱椎骨节段的运动自由度,因此已然成为国际前沿热点。而每一款开发的人工椎间盘都需要进行其运动度的测试,以量化分析其植入人体后对脊柱椎骨系统运动的影响。为此,世界范围内,研究人员开始研究可测量人工椎间盘运动的体外测试装置,主要包括基于尸体的测试装置和脊柱生物力学测试机。但分析发现当前的人工椎间盘的体外测试装置多数仅能实现单自由度(压缩)或两自由度运动度(压缩、扭转)的测量,且需要通过改变夹具位置或更换夹具,最重要的是无法完全模拟类似人体脊柱系统的复杂三维生理运动(轴向压缩、前屈后伸、左/右侧弯和轴向转动)这在一定程度上也导致了当前的人工椎间盘在植入人体后并不能较好地匹配人体椎骨节段的三维运动,导致临床应用不良事件频发,成为患者、医生和人工椎间盘制造商的共同痛点和难点。因此,亟需开发一种新的人工椎间盘三维运动的体外测试系统,用于对人工椎间盘在类似人体脊柱系统轴向压缩、前屈后伸、左/右侧弯和轴向转动等复杂三维运动下的运动特征进行测试和量化分析评估。
技术实现要素:
4.为应对这一挑战,本发明提出了一种人工椎间盘三维运动的体外测试系统及测试方法,可解决人工椎间盘三维运动度的体外测量问题,且无需改变夹具位置或更换夹具,该体外测量装置通过机械臂模拟人体脊柱的三维生理运动(轴向压缩、前屈后伸、左/右侧弯和轴向转动),并将等效生理载荷施加到人工椎间盘,利用机械臂关节内置位移和角度传感器、远红外高速相机获取人工椎间盘三维运动度数据,利用六分量力传感器同步采集人工椎间盘的三维载荷数据;此外,通过设计的夹具可实现人工椎间盘的定位与固定。
5.一种人工椎间盘三维运动的体外测试系统,包括工作台、机械臂、机械臂末端部件、第一法兰盘、六分量力传感器、第二法兰盘、推杆、第一夹具、上椎骨块、人工椎间盘、下椎骨块、第二夹具、第一远红外高速相机、第二远红外高速相机、第三远红外高速相机、第四远红外高速相机、电脑和螺栓;
6.所述的工作台上端右侧设置有第一螺纹孔,通过螺栓能够固定机械臂底端,工作台上端左侧设置有第二螺纹孔,通过螺栓能够固定第二夹具,机械臂顶端通过转动副连接机械臂末端部件,机械臂末端部件设置有第三螺纹孔;
7.所述的第一远红外高速相机、第二远红外高速相机、第三远红外高速相机、第四远红外高速相机放置在工作台台面上;
8.所述的第一法兰盘上端设置有第一通孔,与机械臂末端部件的第三螺纹孔相配合,螺栓插入第一通孔,拧入第三螺纹孔,能实现机械臂末端部件与第一法兰盘上端的紧固,第一法兰盘下端设置有第二通孔,与六分量力传感器上端第四螺纹孔相配合,螺栓插入第二通孔,拧入螺第四纹孔,能够实现第一法兰盘下端与六分量力传感器上端的紧固,第二法兰盘上端设置有第三通孔,第三通孔与第五螺纹孔相配合,螺栓插入第三通孔,拧入第五螺纹孔,实现第二法兰盘上端与六分量力传感器下端的紧固,第二法兰盘下端设置第一凹槽和第六螺纹孔,推杆上端与第一凹槽相配合,螺栓拧入第六螺纹孔,能实现推杆上端紧固;
9.所述的第一夹具顶端设置有第二凹槽和第七螺纹孔,第二凹槽与推杆下端相配合,利用螺栓拧入第七螺纹孔,能实现推杆下端的紧固,第一夹具底端内、外两侧设置有第八螺纹孔,上椎骨块内侧设置第一盲孔,上椎骨块外侧设置第二盲孔,第一盲孔和第二盲孔分别与第八螺纹孔相配合,利用螺栓拧入第八螺纹孔,插入第一盲孔和第二盲孔,能实现上椎骨块的夹持固定,上椎骨块设置第三凹槽用于人工椎间盘上端定位与固定;
10.所述的下椎骨块内侧设置第三盲孔,下椎骨块外侧设置第四盲孔,下椎骨块上端设置有第四凹槽,第四凹槽用于人工椎间盘下端定位与固定,第二夹具顶端设置有第五凹槽、第九外螺纹孔、第十内螺纹孔,第九螺纹孔与第四盲孔相配合,第十螺纹孔与第三盲孔相配合,利用螺栓拧入第九螺纹孔和第十螺纹孔,插入第四盲孔和第三盲孔,能实现下椎骨块的夹持固定,第二夹具底端设置第四通孔,第四通孔与第二螺纹孔相配合,利用螺栓插入第四通孔,拧入第二螺纹孔,能实现第二夹具与工作台的固定。
11.所述的机械臂为七自由度,能够模拟类似人体脊柱系统的复杂三维生理运动(轴向压缩、前屈后伸、左/右侧弯和轴向转动),并将等效生理载荷施加到人工椎间盘,利用机械臂关节内置位移和角度传感器、第一远红外高速相机、第二远红外高速相机、第三远红外高速相机和第四远红外高速相机获取人工椎间盘三维运动度数据,利用六分量力传感器同步采集人工椎间盘三维载荷数据,六分量力传感器与机械臂连接到电脑,电脑用于显示测量的载荷和位移数据。
12.一种人工椎间盘三维运动的体外测试系统的测试方法,包括以下步骤:
13.将人工椎间盘沿着上椎骨块的第三凹槽和下椎骨块的第四凹槽插入,利用机械臂沿竖直方向施加压紧力可实现人工椎间盘的压紧固定,压紧力大小与人体脊柱节段受到的垂直椎骨表面的载荷大小等效,以此获取的数据更为精准;
14.利用机械臂模拟类似人体脊柱系统的复杂三维生理运动,改变上椎骨块的运动状态,使其表现出所需的轴向压缩、前屈后伸、左/右侧弯和轴向转动等运动特征;
15.利用机械臂关节内置位移和角度传感器、第一远红外高速相机、第二远红外高速相机、第三远红外高速相机和第四远红外高速相机获取人工椎间盘三维运动度数据,利用六分量力传感器同步采集人工椎间盘三维载荷数据;
16.通过改变机械臂的三维运动特征,可测量出不同运动状态下人工椎间盘的载荷和位移或角度的数据。
17.与当前人工椎间盘运动度体外测试装置相比,本发明具的有益效果如下:
18.1、再现了更为接近人体脊柱真实的生理运动特征;利用机械臂能够模拟类似人体脊柱系统的复杂三维生理运动(轴向压缩、前屈后伸、左/右侧弯和轴向转动)等运动。
19.2、施加更接近人体脊柱的等效生理载荷能够获取更为精准的人工椎间盘运动度数据。
20.3、不用通过调整夹具位置或更换夹具可实现类似人体脊柱系统的复杂三维生理运动(轴向压缩、前屈后伸、左/右侧弯和轴向转动)运动度的体外测试,解决了使用过程中繁琐费时的问题,实现了简单、方便,和重复的操作。
21.4、利用上、下椎骨块设置的凹槽解决了人工椎间盘不易定位的问题。
附图说明
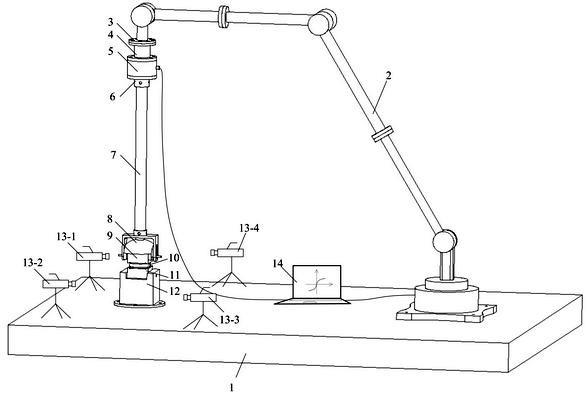
22.图1为本发明的一种人工椎间盘三维运动的体外测试系统整体示意图。
23.图2为本发明的工作台示意图。
24.图3为本发明的机械臂末端部件示意图。
25.图4为本发明的第一法兰盘结构图。
26.图5为本发明的六分量力传感器示意图
27.图6为本发明的第二法兰盘结构图。
28.图7为本发明的推杆示意图。
29.图8为本发明的第一夹具结构图。
30.图9为本发明的上椎骨块示意图。
31.图10为本发明的下椎骨块示意图。
32.图11为本发明的第二夹具结构图。
33.图12为本发明的螺栓示意图。
34.其中:1-工作台;2-机械臂;3-机械臂末端部件;4-第一法兰盘;5-六分量力传感器;6-第二法兰盘;7-推杆;8-第一夹具;9-上椎骨块;10-人工椎间盘;11-下椎骨块;12-第二夹具;13-1-第一远红外高速相机;13-2-第二远红外高速相机;13-3-第三远红外高速相机;13-4-第四远红外高速相机;14-电脑;15-螺栓;i-1-第一螺纹孔;i-2-第二螺纹孔;i-3-第三螺纹孔;i-4-第四螺纹孔;i-5-第五螺纹孔;i-6-第六螺纹孔;i-7-第七螺纹孔;i-8-第八螺纹孔;i-9-第九螺纹孔;i-10-第十螺纹孔;ii-1-第一通孔;ii-2-第二通孔;ii-3-第三通孔;ii-4-第四通孔;iii-1-第一凹槽;iii-2-第二凹槽;iii-3-第三凹槽;iii-4-第四凹槽;iii-5-第五凹槽;iv-1-第一盲孔;iv-2-第二盲孔;iv-3-第三盲孔;iv-4-第四盲孔。
具体实施方式
35.在本发明的描述中,需要理解的是,术语“前”、“后”、“左”、“右”、“上”、“下”、“顶”、“底”、“内”、“外”等字样为基于附图所示的方位或位置关系,仅是为了便于和简化描述本发明,而不是指示或暗示所指的部件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
36.如图1、图12所示,一种人工椎间盘三维运动的体外测试系统,包括工作台1、机械臂2、机械臂末端部件3、第一法兰盘4、六分量力传感器5、第二法兰盘6、推杆7、第一夹具8、上椎骨块9、人工椎间盘10、下椎骨块11、第二夹具12、第一远红外高速相机13-1、第二远红外高速相机13-2、第三远红外高速相机13-3、第四远红外高速相机13-4、电脑14和螺栓15;
37.机械臂2可提供模拟类似人体脊柱的三维生理运动(轴向压缩、前屈后伸、左/右侧
弯和轴向转动),并将等效生理载荷施加到人工椎间盘,利用机械臂2关节内置位移和角度传感器,第一远红外高速相机13-1、第二远红外高速相机13-2、第三远红外高速相机13-3和第四远红外高速相机13-4获取人工椎间盘三维运动度数据,利用六分量力传感器5同步采集人工椎间盘三维载荷数据。
38.如图2所示,所述工作台1上端右侧设置有第一螺纹孔i-1,通过螺栓15能够固定机械臂2底端;本实施例中,第一螺纹孔i-1的数量为4个;工作台1上端左侧设置有第二螺纹孔i-2,通过螺栓15能够固定第二夹具12;本实施例中,第二螺纹孔i-2的数量为4个,第二螺纹孔i-2的数量与第二夹具12底端第四通孔ii-4的数量相匹配。
39.如图1所示,第一远红外高速相机13-1、第二远红外高速相机13-2、第三远红外高速相机13-3和第四远红外高速相机13-4放置在工作台1台面上;
40.如图3所示,所述机械臂2顶端通过转动副连接机械臂末端部件3,机械臂末端部件3设置有第三螺纹孔i-3;本实施例中,第三螺纹孔i-3的数量为8个,第三螺纹孔i-3的数量可根据实际需要设置。
41.如图4所示,所述第一法兰盘4上端设置有第一通孔ii-1,与机械臂末端部件3的第三螺纹孔i-3相配合,螺栓15插入第一通孔ii-1,拧入第三螺纹孔i-3,能实现机械臂末端部件3与第一法兰盘4上端的紧固;本实施例中,第一通孔ii-1为圆形且数量为8个,也可为方形和数量为多个;第一法兰盘4下端设置有第二通孔ii-2,与六分量力传感器5上端第四螺纹孔i-4相配合;本实施例中,第二通孔ii-2为圆形且数量为6个,也可为方形和数量为多个。
42.如图5所示,所述六分量力传感器5上端设置有第四螺纹孔i-4,螺栓15插入第二通孔ii-2,拧入第四螺纹孔i-4,能够实现第一法兰盘4下端与六分量力传感器5上端的紧固;本实施例中,第四螺纹孔i-4数量为6个;六分量力传感器5下端设置有第五螺纹孔i-5,本实施例中,第五螺纹孔i-5数量为6个。
43.如图6所示,第二法兰盘6上端设置有第三通孔ii-3,第三通孔ii-3与第五螺纹孔i-5相配合,螺栓15插入第三通孔ii-3,拧入第五螺纹孔i-5,可实现第二法兰盘6上端与六分量力传感器5下端的紧固;本实施例中,第三通孔ii-3为圆形且数量为6个,也可为方形和数量为多个;第二法兰盘6下端设置第一凹槽iii-1和第六螺纹孔i-6,第六螺纹孔i-6为2个;本实施例中,第一凹槽iii-1为圆形,也可为矩形或三角形。
44.如图7所示,本实施例中,所述的推杆7为圆环形,也可为矩形,或三角形;推杆7上端与第一凹槽iii-1配合,螺栓15拧入第六螺纹孔i-6,可实现推杆7上端紧固。
45.如图8所示,第一夹具8顶端设置有第二凹槽iii-2和第七螺纹孔i-7;第二凹槽iii-2与推杆7下端相配合,利用螺栓15拧入第七螺纹孔i-7,可实现推杆7下端的紧固;本实施例中,所述的第二凹槽iii-2为圆形,也可为矩形或三角形;第七螺纹孔i-7为2个,第一夹具8底端内、外两侧设置有第八螺纹孔i-8;本实施例中,内侧或外侧第八螺纹孔i-8数量分别为2个。
46.如图9所示,上椎骨块9内侧设置第一盲孔iv-1,上椎骨块9外侧设置第二盲孔iv-2;本实施例中,第一盲孔iv-1和第二盲孔iv-2为圆形且数量分别为2个,也可为方形和数量为多个;第一盲孔iv-1和第二盲孔iv-2分别与第八螺纹孔i-8相配合,利用螺栓15拧入第八螺纹孔i-8,插入第一盲孔iv-1和第二盲孔iv-2,可实现上椎骨块9的夹持固定;上椎骨块9
设置第三凹槽iii-3用于人工椎间盘10上端定位与固定;本实施例中,第三凹槽iii-3为矩形和数量为2个,可根据人工椎间盘10具体结构特征进行设计。
47.如图10所示,下椎骨块11内侧设置第三盲孔iv-3,下椎骨块11外侧设置盲孔第四iv-4,本实施例中,第三盲孔iv-3和第四盲孔iv-4为圆形且数量分别为1个,也可为矩形和数量为多个;下椎骨块11上端设置有第四凹槽iii-4用于人工椎间盘10下端定位与固定,本实施例中,第四凹槽iii-4为矩形且数量为2个,可根据人工椎间盘10具体结构特征进行设计。
48.如图11所示,第二夹具12顶端设置有第五凹槽iii-5、第九外螺纹孔i-9、第十内螺纹孔i-10,第五凹槽iii-5为矩形,本实施例中,第九螺纹孔i-9和第十螺纹孔i-10数量分别为1个,第九螺纹孔i-9与第四盲孔iv-4相配合,第十螺纹孔i-10与第三盲孔iv-3相配合,利用螺栓15拧入第九螺纹孔i-9和第十螺纹孔i-10,插入第四盲孔iv-4和第三盲孔iv-3,可实现下椎骨块11的夹持固定;第二夹具12底端设置第四通孔ii-4,第四通孔ii-4与第二螺纹孔i-2相配合,利用螺栓15插入第四通孔ii-4,拧入第二螺纹孔i-2,可实现第二夹具12与工作台1的固定,本实施例中,第四通孔ii-4为圆形且数量为4个,也可为方形和数量为多个。
49.所述的利用机械臂2关节内置位移和角度传感器和第一远红外高速相机13-1、第二远红外高速相机13-2、第三远红外高速相机13-3和第四远红外高速相机13-4获取人工椎间盘10三维运动度数据,利用六分量力传感器5同步采集人工椎间盘10三维载荷数据。
50.所述的六分量力传感器5与机械臂2连接到电脑14,电脑14用于显示测量的载荷和位移数据。
51.一种人工椎间盘三维运动的体外测试系统的测试方法,该方法包括以下步骤:
52.将人工椎间盘10沿着上椎骨块9的第三凹槽iii-3和下椎骨块11的第四凹槽iii-4插入,利用机械臂2沿竖直方向施加压紧力可实现人工椎间盘10的压紧固定;压紧力大小与人体脊柱节段受到的垂直椎骨表面的载荷大小等效,以此获取的数据更为精准。
53.利用机械臂2模拟类似人体脊柱系统的复杂三维生理运动,改变上椎骨块9的运动状态,使其表现出所需的轴向压缩、前屈后伸、左/右侧弯和轴向转动等运动特征。
54.利用机械臂2关节内置位移和角度传感器、第一远红外高速相机13-1、第二远红外高速相机13-2、第三远红外高速相机13-3和第四远红外高速相机13-4获取人工椎间盘10三维运动度数据,利用六分量力传感器5同步采集人工椎间盘三维载荷数据。
55.通过改变机械臂2的三维运动特征,可测量出不同运动状态下人工椎间盘10的载荷和位移或角度的数据。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1