配置为引导医疗装置插入的超声成像系统和检测解剖目标的方法与流程
配置为引导医疗装置插入的超声成像系统和检测解剖目标的方法
1.优先权
2.本技术要求于2021年6月22日提交的美国临时申请第63/213,576号的优先权,其通过引用整体并入本技术。
技术领域
3.本技术涉及医疗器械领域,更具体地涉及配置为引导医疗装置插入的超声成像系统和检测解剖目标的方法。
背景技术:
4.使用超声检测系统容易地检测和进入血管需要用户检测和进入目标区域中的血管,但是在另一区域中的屏幕上观看血管的检测。使用户将他们的注意力集中在两个分离的位置上可能导致在进入血管的位置上的混乱以及确认血管进入的正确位置所需的额外时间。具有允许用户仅在目标区域内进行检测血管,观察血管的检测,确认血管的进入位置以及进入血管的超声检测系统将是有利的。本文公开了解决上述问题的超声检测系统和使用方法。
技术实现要素:
5.本文公开了一种被配置为引导医疗装置插入的超声成像系统。根据一些实施方案,所述系统包括:具有超声生成装置的超声探头,所述超声生成装置被配置为检测目标区域内的一个或多个解剖目标;一个或多个投影仪,其被配置为将一个或多个图标投影在所述目标区域内;以及控制台,其耦合至所述超声探头并且与所述超声生成装置和所述一个或多个投影仪中的每个通信,其中所述控制台被配置为生成所述一个或多个图标。
6.在一些实施方案中,所述超声探头包括一个或多个传感器,所述一个或多个传感器被配置为检测和跟踪所述目标区域内的医疗装置的位置和取向,其中所述一个或多个传感器与控制台通信。
7.在一些实施方案中,所述一个或多个传感器被配置为使用所述医疗装置的磁性特征(magnetic signature)而检测和跟踪所述医疗装置的位置和取向。
8.在一些实施方案中,所述医疗装置的取向包括医疗装置相对于所述超声探头的轨迹角度。
9.在一些实施方案中,所述控制台包括一个或多个处理器、能量源、非暂时性计算机可读介质和多个逻辑模块。
10.在一些实施方案中,所述多个逻辑模块在由所述处理器执行时被配置为执行包括如下的操作:(i)从所述超声探头接收超声信号,(ii)检测所述目标区域内的一个或多个解剖目标,(iii)检测和跟踪所述医疗装置在所述目标区域内的位置和取向,(iv)确定所述目标区域内的一个或多个插入部位以进入所述一个或多个解剖目标,(v)计算沿着所述医疗
装置的轨迹角度从所述一个或多个插入部位到所述一个或多个解剖目标的插入深度,生成一个或多个图标,以及(vi)将所述一个或多个图标投影到所述目标区域内的皮肤表面上。
11.在一些实施方案中,所述一个或多个投影仪包括一个或多个激光器。
12.在一些实施方案中,所述一个或多个图标包括具有与所述超声探头或所述用户有关的形状、尺寸、颜色和取向的图标。
13.在一些实施方案中,所述一个或多个图标对应于(i)所述一个或多个插入部位和(ii)沿着所述医疗装置的轨迹角度从所述一个或多个插入部位到所述一个或多个解剖目标的所述计算的插入深度。
14.在一些实施方案中,在所述目标区域内相对于所述超声探头的特定位置处确定所述一个或多个插入部位。
15.在一些实施方案中,基于所述目标区域内的预定插入深度来确定所述一个或多个插入部位。
16.在一些实施方案中,使用所述医疗装置的一个或多个预定轨迹角度来确定所述一个或多个插入部位。
17.在一些实施方案中,所述医疗装置是针。
18.在一些实施方案中,所述一个或多个解剖目标包括所述目标区域内的一个或多个血管。
19.本文还公开了一种检测解剖目标的方法。根据一些实施方案,所述方法包括:检测目标区域内的解剖目标;检测所述目标区域内的医疗装置;确定所述目标区域内的一个或多个插入部位;计算任何所述插入部位到所述解剖目标的插入深度;生成对应于(i)所述一个或多个插入部位和(ii)到所述解剖目标的插入深度的一个或多个图标;以及将所述一个或多个图标投影到所述目标区域上。该方法还可以是一种检测和进入解剖目标的方法。根据一些实施方案,所述方法包括:检测目标区域内的解剖目标;检测所述目标区域内的医疗装置;确定所述目标区域内的一个或多个插入部位以进入所述解剖目标;计算任何所述插入部位到所述解剖目标的插入深度;生成对应于(i)所述一个或多个插入部位和(ii)到所述解剖目标的插入深度的一个或多个图标;将所述一个或多个图标投影到所述目标区域上;以及在所述插入部位处进入所述解剖目标
20.在该方法的一些实施方案中,检测所述目标区域内的解剖目标包括利用超声探头检测所述解剖目标,所述超声探头具有被配置为产生和检测超声信号的超声生成装置,其中所述超声探头与被配置为接收所述超声信号的控制台通信。
21.在该方法的一些实施方案中,检测目标区域内的医疗装置包括与所述控制台通信并耦合至所述超声探头的一个或多个传感器,其中所述一个或多个传感器检测所述医疗装置的位置和取向。
22.在该方法的一些实施方案中,所述一个或多个传感器检测所述医疗装置的磁性特征,并且在另外的实施方案中,所述医疗装置的磁性特征是唯一的。
23.在该方法的一些实施方案中,所述一个或多个传感器检测所述医疗装置相对于所述一个或多个传感器的轨迹角度。
24.在该方法的一些实施方案中,确定所述目标区域内的所述一个或多个插入部位包括所述控制台确定所述一个或多个插入部位。
25.在该方法的一些实施方案中,所述控制台确定在相对于所述超声探头的特定位置处的所述一个或多个插入部位。
26.在该方法的一些实施方案中,所述控制台通过使用所述医疗装置的预定轨迹角度来确定所述一个或多个插入部位,以确定所述一个或多个插入部位。
27.在该方法的一些实施方案中,所述控制台基于所述目标区域内的预定插入深度来确定所述一个或多个插入部位。
28.在该方法的一些实施方案中,计算任何所述插入部位中的任一个到所述解剖目标的插入深度包括所述控制台沿所述医疗装置的轨迹角度计算所述插入部位中的任一个到所述解剖目标的插入深度。
29.在该方法的一些实施方案中,所述控制台沿着所述医疗装置的所检测的轨迹角度或所述医疗装置的预定轨迹角度来计算所述解剖目标的插入深度。
30.在该方法的一些实施方案中,生成对应于所述一个或多个插入部位和到所述解剖目标的所述插入深度的一个或多个图标包括生成具有对应于所述插入部位的形状和颜色的第一图标和具有对应于沿着所述医疗装置的轨迹角度到所述解剖目标的插入深度的文本的第二图标。
31.在该方法的一些实施方案中,生成一个或多个图标包括当所述医疗装置的轨迹角度改变时生成一个或多个新图标。
32.在该方法的一些实施方案中,当所述医疗装置的轨迹角度改变时生成一个或多个新图标包括生成被配置为向所述用户指示何时所述医疗装置的轨迹角度与所述预定轨迹角度一致的一个或多个新图标。
33.在该方法的一些实施方案中,将所述一个或多个图标投影到所述目标区域上包括所述一个或多个投影仪将所述一个或多个图标投影到所述目标区域上,其中所述一个或多个投影仪与所述控制台通信并耦合至所述超声探头。
34.在该方法的一些实施方案中,将所述一个或多个图标投影到所述目标区域上包括所述一个或多个投影仪将所述一个或多个图标投影到所述目标区域的皮肤表面上。
35.在该方法的一些实施方案中,所述一个或多个投影仪包括一个或多个激光器。
36.在该方法的一些实施方案中,在所述插入部位处进入所述解剖目标包括所述医疗装置进入所述解剖目标。
37.在该方法的一些实施方案中,在所述插入部位处进入所述解剖目标包括沿着预定轨迹角度或所检测的轨迹角度将所述医疗装置插入到所述插入部位中。
38.在该方法的一些实施方案中,进入所述解剖目标包括插入所述医疗装置通过所述一个或多个图标以进入目标血管。
39.在该方法的一些实施方案中,所述解剖目标包括所述目标区域内的一个或多个血管。
40.考虑到更详细地描述这些概念的特定实施方案的附图和以下描述,本文提供的概念的这些和其他特征对于本领域技术人员将变得更加明显。
附图说明
41.将通过参考在附图中示出的公开文本的具体实施方案来呈现公开文本的更具体
的描述。应当理解,这些附图仅描绘了本发明的典型实施方案,因此不应被认为是对其范围的限制。通过使用附图,将更具体和详细地描述和解释本发明的示例性实施方案,其中:
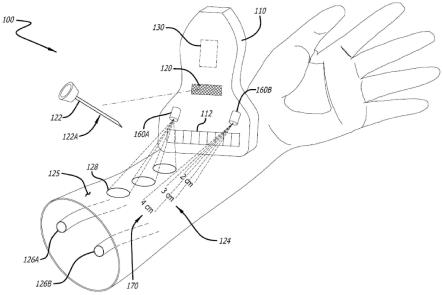
42.图1示出了根据一些实施方案的超声检测系统的透视图。
43.图2示出了根据一些实施方案的包括控制台的超声检测系统的一些部件的框图。
44.图3a示出了根据一些实施方案的超声检测系统的截面侧视图,该超声检测系统检测目标区域内的解剖目标并且计算沿着医疗装置的轨迹角度到解剖目标的插入深度。
45.图3b示出了根据一些实施方案的超声检测系统的平面图,该超声检测系统检测目标区域内的解剖目标并在目标区域上投影一个或多个图标。
46.图3c示出了根据一些实施方案的超声检测系统的截面侧视图,该超声检测系统检测目标区域内的解剖目标并且计算沿着医疗装置的轨迹角度到解剖目标的插入深度。
47.图3d示出了根据一些实施方案的超声检测系统的平面图,该超声检测系统检测目标区域内的解剖目标并且在目标区域上投影一个或多个图标。
48.图4示出了根据一些实施方案的检测和进入目标区域内的解剖目标的示例性方法的流程图。
具体实施方式
49.在更详细地公开一些具体实施方案之前,应当理解,本文公开的具体实施方案不限制本文提供的概念的范围。还应当理解,本文公开的特定实施方案可具有可容易地与特定实施方案分离并且任选地与本文公开的许多其他实施方案中的任何一个的特征组合或替代本文公开的许多其他实施方案中的任何一个的特征。
50.关于本文使用的术语,还应当理解,这些术语是为了描述一些特定实施方案的目的,并且这些术语不限制本文提供的概念的范围。序数(例如,第一、第二、第三等)通常用于区分或标识一组特征或步骤中的不同特征或步骤,并且不提供系列或数字限制。例如,“第一”、“第二”、“第三”特征或步骤不必按顺序出现,并且包括这些特征或步骤的特定实施方案不必限于这三个特征或步骤。为了方便起见,使用诸如“左”、“右”、“顶”、“底”、“前”、“后”等的标记,而并不旨在暗示例如任何特定的固定位置、取向或方向。相反,这样的标记用于反映例如相对位置、取向或方向。除非上下文另有明确规定,否则单数形式的“一种”、“一个”和“该”包括复数指代。
51.术语“逻辑”可以表示被配置为执行一个或多个功能的硬件、固件或软件。作为硬件,术语逻辑可以指或包括具有数据处理和/或存储功能的电路。此类电路的示例可包含(但不限于)硬件处理器(例如,微处理器、一个或多个处理器核心、数字信号处理器、可编程门阵列、微控制器、专用集成电路“asic”等)、半导体存储器或组合元件。
52.另外,或可替换地,术语逻辑可以指或包括软件,诸如一个或多个进程、一个或多个实例、应用编程接口(api)、子例程、函数、小应用程序、小服务程序、例程、源代码、目标代码、共享库/动态链接库(dll),或甚至一个或多个指令。该软件可以存储在任何类型的合适的非瞬态存储介质或瞬态存储介质(例如,电、光、声或其它形式的传播信号,诸如载波、红外信号或数字信号)中。非瞬态存储介质的示例可以包括但不限于或限制于可编程电路;诸如非永久存储(例如,任何类型的随机存取存储器“ram”)的易失性存储器;或永久存储器,诸如非易失性存储器(例如,只读存储器“rom”、功率备份ram、闪存、相变存储器等)、固态驱
动器、硬盘驱动器、光盘驱动器或便携式存储装置。作为固件,逻辑可以存储在永久存储器中。
53.除非另外定义,否则本文使用的所有技术和科学术语具有与本领域普通技术人员通常理解的相同的含义。
54.图1示出了根据一些实施方案的超声成像系统100的透视图,该超声成像系统100包括其上具有一个或多个投影仪160a-160b的超声探头110。在一些实施方案中,超声成像系统100可以被配置为引导医疗装置插入。超声探头110可以被配置为通过接触目标区域124内的皮肤表面来检测目标区域124内的一个或多个解剖目标。在一些实施方案中,超声探头110可以包括超声生成装置112,该超声生成装置112包括超声声学堆叠或其它各种形式的超声生成。超声生成装置112可以被配置为将超声波引导到目标区域124中并检测超声波的反射。在一些实施方案中,目标区域124可以包括要由医疗装置122进入的一个或多个解剖目标126a-126b。尽管所示的一个或多个解剖目标126a-126b包括两个解剖目标,但是在其它实施方案中,一个或多个解剖目标可以包括1个、3个、4个或更多个解剖目标。在所示的实施方案中,一个或多个解剖目标126a-126b包括血管,因此解剖目标在下文中可以称为血管。然而,在其它实施方案中,解剖目标可以包括除血管之外的解剖成分。在一些实施方案中,医疗装置122可以包括血管进入装置,该血管进入装置包括导管、外周插入的中央导管(“picc”)、外周静脉管线(“piv”)、中心静脉导管(“cvc”)、中线导管、针等。在一些实施方案中,医疗装置122可以包括含铁成分,该含铁成分被配置为包含压印在其中或以其他方式与医疗装置122耦合的磁性特征122a,该磁性特征122a被配置为由耦合至超声探头110的一个或多个传感器120在三维空间中检测和跟踪。在一些实施方案中,一个或多个传感器120可以被配置为检测和跟踪医疗装置122相对于一个或多个传感器120(或作为整体的超声探头110)的位置以及包括医疗装置122相对于一个或多个传感器120(或作为整体的超声探头110)的轨迹角度的取向。例如,在美国专利第9,456,766号、美国专利第9,492,097号、美国专利第9,554,716号、美国专利第10,449,330号、美国专利第10,524,691号,以及美国第2018/0116551号中可以找到超声探头对针的磁跟踪的示例,其各自通过引用整体并入本技术。
55.磁性特征122a可以包括区分关于医疗装置122的信息/数据,使得多个医疗装置122的第一子集包括与多个医疗装置122的第二子集的磁性特征122a不同的磁性特征。在一些实施方案中,区分信息可以包括医疗装置122的型号信息,例如模块名称或型号。在一些实施方案中,区分信息可以包括医疗装置122的尺寸信息,例如长度或直径。在一些实施方案中,区分信息可以包括医疗装置122的制造信息,例如制造日期或批号。在一些实施方案中,区分信息可以包括与医疗装置122有关的唯一信息,例如序列号。照此,在一些实施方案中,任何一个医疗装置122的磁性特征122a相对于每个其他医疗装置122的磁性特征可以是唯一的(即,不同于)。
56.在一些实施方案中,超声探头110还可以包括与超声生成装置112通信的控制台130。控制台130可以被配置为从超声生成装置112接收检测到的超声信号。超声探头110可以包括耦合至超声探头110的一个或多个传感器120,传感器120被配置为检测医疗装置122。超声探头110还可以包括耦合至超声探头110的一个或多个投影仪160a-160b,该一个或多个投影仪160a-160b被配置为将一个或多个图标170投影在目标区域124的皮肤表面
125上。在一些实施方案中,一个或多个投影仪160a-160b可以(i)与控制台130通信,以及(ii)被配置为将一个或多个图标170投影到目标区域124的皮肤表面125上。在一些实施方案中,一个或多个投影仪160a-160b可以包括一个或多个激光器。在一些实施方案中,超声生成装置112、一个或多个传感器120和一个或多个投影仪160a-160b可以有线连接到控制台130或与控制台130无线通信。示例性无线通信模式可以包括wifi、蓝牙、近场通信(nfc)、蜂窝全球移动通信系统(“gsm”)、电磁(em)、射频(rf)、其组合等。
57.如图1所示,超声探头110可以被配置为检测一个或多个解剖目标,包括目标区域124内的一个或多个解剖目标126a-126b。控制台130可以被配置为当医疗装置122在目标区域124内移动时检测并跟踪医疗装置122。控制台130可以被配置为当医疗装置122被带入目标区域124以进入一个或多个血管126a-126b时检测医疗装置122的轨迹角度(见图3a的轨迹角度123)。控制台130可以被配置为确定一个或多个插入部位128并且计算沿着医疗装置122的当前轨迹角度在插入部位128处到一个或多个血管126a-126b的插入深度(见图3a的插入深度127)。控制台130可以被配置为生成一个或多个图标170,该一个或多个图标被配置为向用户标识插入部位128以及插入部位128到一个或多个血管126a-126b的插入深度。在一些实施方案中,一个或多个投影仪160a-160b可以耦合至超声探头110或可以与超声探头110整体形成。有利地,一个或多个投影仪160a-160b可以被配置为投影对应于到目标区域124上的一个或多个血管126a-126b的插入部位128和插入深度的一个或多个图标170,以帮助在医疗装置插入期间引导用户。此外,一个或多个图标170允许用户将他们的全部注意力集中在目标区域124上,而一个或多个投影仪160a-160b描绘用于引导医疗装置122的插入的信息。
58.图2示出了根据一些实施方案的包括控制台130的超声成像系统100的一些部件的框图。在一些实施方案中,控制台130包括一个或多个处理器132、能量源134、非暂时性计算机可读介质(“存储器”)136和多个逻辑模块。在一些实施方案中,能量源134可以被配置为向一个或多个投影仪160a-160b、一个或多个传感器120和超声生成装置112提供电力。在一些实施方案中,多个逻辑模块可以包括以下中的一个或多个:超声探头接收逻辑138、血管检测激活逻辑140、血管检测逻辑142、医疗装置跟踪激活逻辑144、医疗装置跟踪检测逻辑146、插入部位确定逻辑148、医疗装置轨迹确定逻辑150、图标生成逻辑152、投影仪激活逻辑154和投影仪描绘逻辑156。在一些实施方案中,超声探头接收逻辑138可以被配置为从超声生成装置112接收检测到的超声信号。
59.在一些实施方案中,血管检测激活逻辑140可以被配置为根据所检测的超声信号来激活对目标区域124内的一个或多个解剖目标126a-126b的检测。在一些实施方案中,在控制台130接收到检测到的超声信号时可以立即激活血管检测激活逻辑140。
60.在一些实施方案中,血管检测逻辑142可以被配置为根据所检测的超声信号来检测包括目标区域124内的一个或多个血管的一个或多个解剖目标126a-126b。在一些实施方案中,血管检测逻辑142可以被配置为检测超声探头110相对于目标区域124内的一个或多个血管126a-126b的取向。
61.在一些实施方案中,医疗装置跟踪激活逻辑144可以被配置为激活一个或多个传感器120以跟踪移动通过目标区域124的医疗装置122。在一些实施方案中,当医疗装置122使用一个或多个传感器120移动通过目标区域124时,医疗装置跟踪检测逻辑146可以被配
置为检测和跟踪医疗装置122。在一些实施方案中,医疗装置跟踪检测逻辑146可以检测医疗装置122的磁性特征122a。在一些实施方案中,医疗装置跟踪检测逻辑146可以被配置为检测和跟踪医疗装置122的位置和医疗装置122的取向,其包括医疗装置122相对于一个或多个传感器120或超声探头110整体的轨迹角度。
62.在一些实施方案中,插入部位确定逻辑148可以被配置为确定目标区域124内的一个或多个插入部位128,用于进入一个或多个血管126a-126b。插入部位128可以是目标区域124的皮肤表面125上的一个或多个位置,其中医疗装置122可以沿着轨迹角度进入一个或多个血管126a-126b。在一些实施方案中,可使用医疗装置122的预定轨迹角度来确定一个或多个插入部位128。例如,进入一个或多个血管126a-126b的医疗装置122的35
°
或45
°
的相对于血管126a-126b的预定轨迹角度可用于确定插入部位128在目标区域124内的位置。在一些实施方案中,插入部位确定逻辑148可以被配置为确定相对于超声探头110的一个或多个插入部位128。在一些实施方案中,插入部位确定逻辑148可以被配置为确定预定义插入深度的一个或多个插入部位128。在一些实施方案中,插入部位确定逻辑148可以被配置为使用关于医疗装置122的信息(例如,医疗装置的构造和型号、医疗装置的长度,或类似物)来确定目标区域124内进入一个或多个血管126a-126b的一个或多个插入部位128,从而确定一个或多个插入部位128。
63.在一些实施方案中,医疗装置轨迹确定逻辑150可以被配置为确定医疗装置122相对于血管126a-126b中的目标血管(即,目标血管126a)的轨迹角度,并且计算医疗装置122需要插入到目标区域124中的插入深度,以便在一个或多个插入部位128处沿着医疗装置122的所检测的轨迹角度进入目标血管126a。随着医疗装置122的当前轨迹角度改变,医疗装置轨迹确定逻辑150可以被配置为确定医疗装置122需要插入目标区域124以在一个或多个插入部位128处进入目标血管126a的新插入深度。在一些实施方案中,随着检测到的轨迹角度改变时,插入部位确定逻辑150可以确定一个或多个新的插入部位128以进入目标血管126a。然后,医疗装置轨迹确定逻辑150可以确定医疗装置122需要插入到目标区域124中的插入,以在一个或多个新插入部位128处沿着医疗装置122的检测的轨迹角度进入目标血管126a。在一些实施方案中,医疗装置轨迹确定逻辑150可以使用用户预定轨迹角度来计算医疗装置122需要插入到目标区域124中的插入深度。
64.在一些实施方案中,图标生成逻辑152可以被配置为生成被配置为描绘在目标区域124内的皮肤表面125上的一个或多个图标170。在一些实施方案中,一个或多个图标170可以包括(i)被配置为指示一个或多个插入部位128的一个或多个插入部位位置图标170,以及(ii)被配置为指示到目标血管126a的计算的插入深度的一个或多个血管插入图标170。在一些实施方案中,一个或多个图标170可包括各种形状(例如,圆形、正方形、矩形、三角形等)、各种尺寸、各种颜色、各种取向和各种文本。在一些实施方案中,一个或多个图标170可被配置为闪光、闪烁或滚动通过目标区域124。在一些实施方案中,各种颜色可以对应于目标血管126a的类型、目标血管126a的尺寸和插入深度等。在一些实施方案中,各种文本可以对应于单位测量的插入深度(例如,厘米、英寸等)或可以对应于医疗装置122的预定轨迹角度(例如,120
°
、65
°
等)。在一些实施方案中,可以改变一个或多个图标170的取向。例如,可以在横向视图、纵向视图或其组合中在目标区域上描绘一个或多个图标170。在一些实施方案中,可以相对于超声探头110改变一个或多个图标170的取向。在一些实施方案中,
用户可以确定一个或多个图标170的形状、尺寸、颜色和取向。
65.在一些实施方案中,投影仪激活逻辑154可以被配置为激活一个或多个投影仪160a-160b。在一些实施方案中,投影仪激活逻辑154可以在启动系统100时激活一个或多个投影仪160a-160b。在一些实施方案中,投影仪描绘逻辑156可以被配置为将一个或多个图标170投影到目标区域124中的皮肤表面125上。在一些实施方案中,使用用户预定轨迹角度来(i)确定一个或多个插入部位128和(ii)计算到目标血管126a的插入深度。在一些实施方案中,投影仪描绘逻辑156可以被配置为当医疗装置122以一个或多个预定轨迹角度123倾斜时改变一个或多个图标170的形状、颜色或尺寸。在一些实施方案中,一旦医疗装置122被确认插入到目标血管126a中,投影仪描绘逻辑156可以被配置为停止将一个或多个图标170投影到目标区域124上。在一些实施方案中,投影仪描绘逻辑156可以被配置为以相对于超声探头110或用户的不同取向来投影一个或多个图标170。
66.图3a示出了根据一些实施方案的检测和计算到解剖目标126a-126b的插入深度127的系统100的截面图。超声探头110如上所述。超声探头110检测目标区域124内的一个或多个血管126a-126b。控制台130可以被配置为使用一个或多个传感器120来跟踪目标区域124内的医疗装置122。控制台130可以被配置为(i)确定目标区域124内的一个或多个插入部位128,(ii)生成对应于一个或多个插入部位128的一个或多个图标170,以及(iii)经由一个或多个投影仪160a-160b在目标区域124上描绘一个或多个图标170。当医疗装置122在目标区域124内移动时,一个或多个传感器120可以被配置为(i)确定医疗装置122相对于耦合至超声探头110的一个或多个传感器120的轨迹角度123,以及(ii)将所检测的医疗装置122的轨迹角度123传送到控制台130。控制台130可以使用检测到的医疗装置122相对于目标血管126a的轨迹角度123来确定插入深度127,医疗装置122需要在插入部位128处插入到目标区域124中,以沿着检测到的医疗装置122的轨迹角度123进入目标血管126a。例如,医疗装置122相对于目标血管126a的轨迹角度123(例如,图3a中所示的约135度的角度123)导致医疗装置122必须行进通过目标区域124以进入目标血管126a的更大的插入深度127。控制台130可以被配置为在目标区域124内的医疗装置122的检测的轨迹角度123改变时更新由一个或多个投影仪160a-160b描绘的一个或多个图标170。
67.图3b示出了根据一些实施方案的检测目标区域124内的医疗装置122的图3a的系统100和描绘目标区域124内的皮肤表面125上的一个或多个图标170的一个或多个投影仪160a-160b的平面图。如上所述,超声探头110被配置为检测目标区域124内的目标血管126a。当如上所述超声探头110在目标区域124内时,医疗装置122由耦合至超声探头110的一个或多个传感器120检测。如图3b所示,控制台130被配置为生成对应于一个或多个插入部位128的图标170a和对应于目标血管126a在该特定插入部位128处沿着医疗装置122的轨迹角度123的插入深度127的图标170b。投影仪160a-160b可以被配置为描绘目标区域124内的图标170a-170b。图标170a-170b可以被配置为在目标区域124中彼此相邻并且纵向成直线,以使得用户能够快速地识别到目标血管126a的插入部位128和插入深度127。
68.图3c示出了根据一些实施方案的检测和计算到解剖目标126的插入深度127的系统100的截面侧视图。如图3c所示,医疗装置122的轨迹角度123(例如,图3c中所示的约95度的角度123)比图3a所示的医疗装置122的轨迹角度123更尖锐。因此,为了进入图3c中的目标血管126a,医疗装置122需要在目标区域124内行进的计算的插入深度127小于医疗装置
122需要在图3a中行进的计算的插入深度127。
69.图3d示出了根据一些实施方案的检测目标区域124内的医疗装置122和描绘目标区域124内的图标170a-170b的一个或多个投影仪160a-160b的图3c的系统100的平面图。图标170b可被配置为指示图3c中计算的插入深度127。此外,投影仪160a-160b可以描绘在横向方向上定向的图标170b,给予用户图标170a-170b的多个观看选项。
70.图4示出了根据一些实施方案的检测和进入诸如血管126a的解剖目标的示例性方法200的流程图。在一些实施方案中,方法200包括检测目标区域124内的血管126a(框202)。在一些实施方案中,检测目标区域124内的血管126a包括使用具有超声生成装置112的超声探头110来检测血管126a。在一些实施方案中,检测目标区域124内的血管126a包括用超声探头110接触目标区域124的皮肤表面125。
71.方法200还包括检测目标区域124内的医疗装置122(框204)。在一些实施方案中,检测目标区域124内的医疗装置122包括检测目标区域124内的医疗装置122的一个或多个传感器120。在一些实施方案中,一个或多个传感器120可以检测医疗装置122的磁性特征122a。在一些实施方案中,一个或多个传感器120可以检测医疗装置122在目标区域124内的位置以及医疗装置122相对于耦合至超声探头110的一个或多个传感器120的取向并将其传送到控制台130。
72.方法200还包括确定目标区域124内的一个或多个插入部位128以进入血管126a(框206)。在一些实施方案中,确定一个或多个插入部位128包括控制台130确定一个或多个插入部位128。在一些实施方案中,可以通过使用预定轨迹角度来确定目标区域124内的一个或多个插入部位128,从而确定一个或多个插入部位128。在一些实施方案中,可以确定一个或多个插入部位128的预定插入深度。在一些实施方案中,可以在相对于超声探头110的特定位置处确定一个或多个插入部位128。
73.方法200还包括计算血管126a在一个或多个插入部位128处的插入深度127(框208)。在一些实施方案中,控制台130被配置为计算血管126a在一个或多个插入部位128处的插入深度127。在一些实施方案中,控制台130使用所检测到的医疗装置122的轨迹角度123来计算到血管126a的插入深度127,从而计算在一个或多个插入部位128处的插入深度127。在一些实施方案中,控制台130使用医疗装置122的预定轨迹角度来计算一个或多个插入部位128到血管126a的插入深度127。在一些实施方案中,控制台130可以使用预定的插入深度来限定一个或多个插入部位。换言之,插入部位128可以被限定为对应于限定的插入深度127,例如2cm、3cm或4cm。
74.方法200还包括生成(i)一个或多个图标170,该一个或多个图标170对应于一个或多个插入部位128,以及(ii)一个或多个插入部位128到目标血管126a的插入深度127(框210)。在一些实施方案中,控制台130可被配置为生成一个或多个图标170。在一些实施方案中,一个或多个图标170可以包括各种形状、颜色、文本、尺寸等。在一些实施方案中,具有形状、尺寸和颜色的第一图标170可以对应于插入部位128,并且具有文本的第二图标170可以对应于沿着所检测到的医疗装置122的轨迹角度123从插入部位128到血管126a的插入深度127。在一个实施方案中,具有形状、尺寸、颜色和形状内的文本的单个图标170可以对应于插入部位128和沿医疗装置122的所检测的轨迹角度123从插入部位128到血管126a的插入深度127。在一些实施方案中,生成一个或多个图标170包括生成(i)对应于一个或多个插入
部位128的一个或多个新图标170,以及(ii)当医疗装置122的轨迹角度123改变时一个或多个插入部位128到解剖目标126的插入深度127。在一些实施方案中,生成一个或多个新图标170包括生成被配置为向用户指示医疗装置122的轨迹角度123与预定轨迹角度123之一一致的一个或多个新图标170。在一些实施方案中,生成一个或多个新图标170包括改变新图标170的尺寸、形状或颜色中的一个或多个以向用户指示医疗装置122的轨迹角度123与预定轨迹角度123之一一致。
75.方法200还包括将一个或多个图标170投影在目标区域124上(框212)。在一些实施方案中,将一个或多个图标170投影在目标区域124上包括一个或多个投影仪160a-160b将一个或多个图标170投影在目标区域124内的皮肤表面125上。在一些实施方案中,将一个或多个图标170投影在目标区域124上包括一个或多个投影仪160a-160b以相对于超声探头110或用户的不同取向将一个或多个图标170投影在目标区域124上。
76.方法200还包括在插入部位128进入血管126a(框214)。在一些实施方案中,在插入部位128处进入血管126a包括将医疗装置122沿着所检测的轨迹角度123插入到插入部位128中以进入血管126a。在一些实施方案中,将医疗装置122插入到插入部位128中包括通过投影到对应于插入部位128的目标区域124上的图标170插入医疗装置122。在一些实施方案中,将医疗装置122插入到插入部位128中包括将医疗装置插入由目标区域124上的图标170所描绘的计算出的插入深度127。
77.虽然本文已经公开了一些特定实施方案,并且虽然已经详细公开了特定实施方案,但是特定实施方案并非旨在限制本文提供的概念的范围。本领域的普通技术人员可以想到另外的适应和/或修改,并且在更广泛的方面,也包括这些适应和/或修改。因此,在不脱离本文提供的概念的范围的情况下,可以偏离本文公开的具体实施方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1