适用于犬科足部压力状态监测的柔性传感器DLP成形技术方法
适用于犬科足部压力状态监测的柔性传感器dlp成形技术方法
技术领域
1.本发明属于柔性传感器制造领域,具体涉及利用多材料dlp3d打印技术制造适用于犬科足部压力状态监测的柔性传感器。
背景技术:
2.随着物质生活条件的不断发展,人民收入水平的逐步提高,我国宠物饲养的数量逐步增长,其中犬科类宠物占比最大,宠物行业规模也在不断扩大。
3.宠物医疗是宠物服务领域中最大的子行业,我国宠物医疗行业起多的宠物饲养者所重视[文献1:陈来华.中国宠物行业现状与影响因素及发展趋势[j].中国动物保健,2018,20(08):4-8.]。针对犬科类宠物足部状态的监测设备就属于疾病防御的领域,而监测功能实现的关键就是柔性传感器的制造技术。犬科类宠物足部压力状态监测可以实时跟踪其四肢受力情况,在某一侧足、腿部受损时,其足部压力会出现明显变化,此时可通过压力监测设备发现四肢受损或病变状况。而利用柔性传感器技术,可以把压力传感器和现有的犬科类宠物穿戴式设备相结合,使得这种压力监测在不影响宠物正常行动的条件下进行。
[0004]
多材料dlp光固化成形方法可以成形结构复杂、多种材料构成的样件,更有利于个性化定制产品的生产。本发明中配置用于可实现柔性压阻效应的光固化材料,使用的多材料dlp3d打印设备,一体化成形用于犬科足部压力状态监测的柔性传感器,极大的减少了制造成本,提高了制造效率。
技术实现要素:
[0005]
本发明的目的在于提供一种穿戴式犬科足部压力状态监测的柔性传感器的制作方法,优化其成形工艺,更好的适用在现有宠物医疗保健行业中针对宠物健康疾病预防的监测设备领域。
[0006]
为实现上述目的,本发明提供一种柔性传感器及穿戴式设备,包括:
[0007]-柔性传感器,打印导电光固化树脂作为应变敏感材料;
[0008]-由柔性光敏树脂制成的犬科宠物穿戴式掌套设备。
[0009]
在本发明的实施方式中,所述导电光固化树脂以石墨烯1-25%、碳纳米管0.04-1.5%、分散剂0.001-1%、光敏预聚体树脂30-45%、增稠剂1-10%、偶联剂0.01-5%、第一溶剂25-70%和第二溶剂20-40%的比例配制。
[0010]
在本发明的实施方式中,所述应柔性传感器厚度在0.5-1.5mm之间,保证传感器耐用性同时尽可能避免宠物穿戴中的不适感。
[0011]
在本发明的实施方式中,所述犬科宠物的足部穿戴式设备由柔性光敏树脂通过多材料光固化成形技术制得。
[0012]
在本发明的实施方式中,所述柔性光敏树脂百分数包括:光敏预聚体树脂 30.0-60.0%,非反应型树脂3.0-10.0%,活性稀释剂20.0-50.0%,光引发剂 5.0-10.0%,流平
剂0.5-1.5%,阻聚剂0.3-1.5%。
[0013]
在本发明的实施方式中,所述柔性穿戴式掌套厚度为1-1.5mm,穿戴式掌套需有较高耐磨性,同时应避免过厚造成的穿着不适。
[0014]
在本发明的实施方式中,所述多材料dlp3d打印的基本流程为:加入所得导电光固化树脂及所得柔性光敏树脂至多材料dlp3d打印机中,待导电光固化树脂打印完成后,依次更换打印设备多功能平台至超声清洗工位、干燥工位以完成对打印后续处理,随后将打印原料切换至柔性光敏树脂,基于三维扫描所得犬掌模型,重复上述流程完成对犬掌穿戴设备的打印。
[0015]
本发明的适用于犬科足部压力状态监测的柔性传感器dlp成形技术方法,还包括:
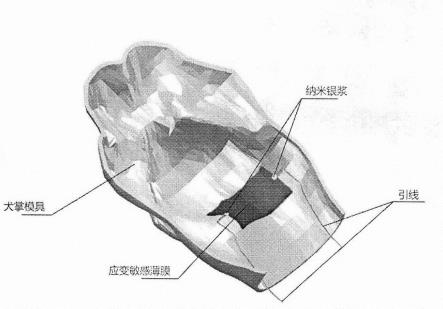
[0016]-引线,由所述应变敏感薄膜覆有固化导电浆料处的两端引出,并连接至电阻测量装置上。
[0017]
在本发明的实施方式中,所述引线为直径介于2μm-2mm的铜、金、银导线。
[0018]
在本发明的实施方式中,所述引线在导电浆料光固化成形后通过纳米银浆粘结。
[0019]
与现有技术中的柔性传感器相比,本发明的柔性传感器因利用了多材料dlp3d打印的导电光固化树脂制备,并通过快速成形技术利用柔性光敏树脂制备宠物穿戴式设备,故具有如下的优点:
[0020]
1)测量应变范围大,性能稳定性好,可重复性好,灵敏度高,电阻变化率和应变之间的有很好的线性关系;
[0021]
2)弹性极限大,远大于普通金属或者合金传感器;
[0022]
3)柔性制造,材料利用率高,可一定程度上任意设计传感器形状;
[0023]
4)测试精度高,信号好,信噪比高;
[0024]
5)利用三维扫描技术获得宠物足部模型,快速成形获得的穿戴式设备精度较高,能够很好贴合宠物足部,厚度适中,穿戴舒适度高;
[0025]
6)应变敏感薄膜除作为宠物穿戴式监测设备的关键部件外,在应力应变分析等领域也具有广泛的应用价值;
[0026]
7)多材料dlp打印效率高,操作简单,同设备打印可极大减少制造成本。
附图说明
[0027]
图1为dlp3d打印原理示意图;
[0028]
图2为多材料dlp3d打印设备结构示意图;
[0029]
图3为多材料dlp3d打印设备中多功能旋转平台结构示意图;
[0030]
图4为本发明制备犬科宠物穿戴式设备过程中三维扫描获得的足面模型;
[0031]
图5为本发明中设计的宠物穿戴式设备模型;
[0032]
图6为本发明于实际应用中应变敏感薄膜嵌套于穿戴式设备的示意图;
[0033]
图7为本发明制得的柔性传感器在实验测试中得到的压力循环变化图。
具体实施方式
[0034]
本发明中适用于犬科足部压力状态监测的柔性传感器,是利用打印用导电光固化树脂作为应变敏感材料,并与柔性光敏树脂植被的犬科宠物足部穿戴式设备相结合。
[0035]
下面通过具体实施例详细说明本发明的技术方案,以便本领域技术人员更好理解和实施本发明的技术方案,但并不因此将本发明限制在所属的实例范围之中。
[0036]
实施例1
[0037]
本实施例提供的用于柔性压力传感器的打印用导电光固化树脂,以质量百分数计,其配方包括:石墨烯10%、碳纳米管0.5%、光敏预聚体树脂25%、乙二醇30%、聚乙烯醇0.05%、聚乙烯烯吡咯烷酮0.2%、油性树脂10%、硅烷偶联剂0.05%、乙二醇丁醚8%和n-甲基吡咯烷酮16.2%。
[0038]
制备柔性宠物穿戴式掌套的柔性光敏树脂配方(质量百分数)为:光敏预聚体树脂 45%、纯丙树脂5%、单官能度单体甲基丙烯酸异冰片32.5%、双官能度单体新戊二醇二丙烯酸酯8%、引发剂8%、流平剂1%、阻聚剂0.5%。
[0039]
将制得的导电光固化树脂、柔性光敏树脂分别加入到多材料dlp3d打印设备的双料缸中,首先进行柔性传感器的打印工作,切换多功能平台至导电光固化树脂打印工位,设置打印参数为:打印层面积10mm2,相关打印参数为:光强9000uw/cm2、曝光时间10s、底部加强光强5倍、光固化打印层厚0.05mm,完成打印制得应变敏感薄膜,打印结束后依次调整多功能平台至超声清洗、干燥工位完成后续处理;切换多功能平台至柔性光敏树脂打印工位,依据三维扫描得到的犬掌模型,重复上述操作完成柔性宠物穿戴式掌套的打印。
[0040]
将引线通过纳米银浆粘结于固化后的导电浆料处,将所述薄膜放入并粘合至所得柔性宠物穿戴式掌套,制备得适用于犬科足部压力状态监测的柔性传感器。
[0041]
实施例2
[0042]
本实施例提供的用于柔性压力传感器的打印用导电光固化树脂,以质量百分数计,其配方包括:石墨烯9%、碳纳米管1.5%、光敏预聚体树脂30%、乙二醇5%、聚乙烯醇 0.05%、聚乙烯烯吡咯烷酮0.2%、油性树脂10%、硅烷偶联剂0.05%、乙二醇丁醚8%和 n-甲基吡咯烷酮16.2%。
[0043]
制备宠物穿戴式设备的柔性光敏树脂配方(质量百分数)为:光敏预聚体树脂45%、氯醋树脂7%、单官能度单体丙烯酰吗啉31.4%、双官能度单体丙氧基化(2)二丙二醇丙烯酸酯8%、引发剂7%、流平剂0.8%、阻聚剂0.8%,基于三位扫描得到的宠物足部三维模型,更换多材料dlp3d打印设备原料至柔性光敏树脂,据扫描所得模型打印出相应柔性穿戴式设备。
[0044]
柔性传感器、柔性宠物穿戴式掌套的打印及装配操作同实施例1。
[0045]
将引线通过纳米银浆粘结于固化导电浆料处,把所述薄膜放入并粘合至所得柔性宠物穿戴式掌套,制备得适用于犬科足部压力状态监测的柔性传感器。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1