一种基于喉肌电信号的杓状软骨运动调节系统及方法
1.本技术涉及医疗设备技术领域,特别涉及一种基于喉肌电信号的杓状软骨运动调节系统及方法。
背景技术:
2.单侧喉部肌肉损伤会影响杓状软骨的正常动作,仅依靠健侧的喉部肌肉无法有效带动杓状软骨及声带运动,可引起声带运动障碍或声门闭合不全,导致持续性音色改变、声音嘶哑、呼吸困难、饮水呛咳等症状,严重降低患者的生活质量甚至危及生命。目前,在临床上主要用诸如注射喉成形术、甲状软骨成形术或杓状软骨内收术等手术改善声门闭合,但是这些手术无法让患侧声带“动起来”。传统上可以利用功能性电刺激患侧喉肌,带动声带内收、外展,起到改善发音和呼吸的作用。然而,由于此时患侧肌肉已经处于损伤和异常状态,持续对肌肉进行刺激一方面无法达到理想的效果,另一方面还会导致进一步的损伤。
技术实现要素:
3.为解决现有的喉起搏器在单侧肌肉失能时,对肌肉进一步刺激加重损伤的问题,本技术提供一种基于喉肌电信号的杓状软骨运动调节系统及方法,能够改善喉部肌肉麻痹患者的发音、呼吸、气道保护情况,避免对患侧喉肌进行电刺激加深肌肉的损伤程度。
4.该技术方案如下:
5.一方面,提供了一种基于喉肌电信号的杓状软骨运动调节系统,包括:
6.肌电电极、肌电信号处理器、杓状软骨驱动电机以及电源;
7.所述肌电电极一端设置于健侧喉肌的内部,另一端连接所述肌电信号处理器的输入端;所述肌电信号处理器的输出端连接所述杓状软骨驱动电机的控制信号输入端,所述杓状软骨驱动电机的动端连接杓状软骨,所述电源连接所述杓状软骨驱动电机的供电输入端;
8.所述肌电电极用于获取所述健侧喉肌的原始肌电信号,并向所述肌电信号处理器发送所述原始肌电信号;
9.所述肌电信号处理器用于根据所述原始肌电信号生成电机驱动信号,并向所述杓状软骨驱动电机发送所述电机驱动信号,所述电机驱动信号为所述原始肌电信号的同频电信号;
10.所述杓状软骨驱动电机用于基于所述电机驱动信号,带动所述杓状软骨运动;
11.所述电源用于为所述杓状软骨驱动电机供电。
12.在一些实施例中,所述肌电电极包括电极针,所述电极针的头端置于健侧喉肌的内部,所述电极针的尾端连接所述肌电信号处理器的输入端。
13.在一些实施例中,所述电极针的尾端与所述肌电信号处理器的输入端通过纳米生物电信号传导线连接。
14.在一些实施例中,所述肌电信号处理器包括预处理模块和驱动模块;
15.所述预处理模块用于将所述原始肌电信号进行预处理,并将预处理后的肌电信号发送至所述驱动模块;
16.所述驱动模块用于根据所述预处理后的肌电信号生成所述电机驱动信号,并将所述电机驱动信号发送至所述杓状软骨驱动电机。
17.在一些实施例中,所述预处理模块用于将所述原始肌电信号进行滤波处理和放大处理,生成所述预处理后的肌电信号,并将所述预处理后的肌电信号发送至所述驱动模块。
18.在一些实施例中,所述驱动模块用于:
19.将所述预处理后的肌电信号进行特征分析,得到肌电信号特征数据;
20.根据预存的肌电信号特征与电机驱动信号对应关系,确定所述肌电信号特征数据对应的电机驱动信号,并将所述电机驱动信号发送至所述杓状软骨驱动电机。
21.在一些实施例中,所述电源包括外接电池。
22.另一方面,提供了一种基于喉肌电信号的杓状软骨运动调节方法,应用于如上所述的基于喉肌电信号的杓状软骨运动调节系统,所述方法包括:
23.获取健侧喉肌的原始肌电信号;
24.将所述原始肌电信号进行预处理,生成预处理后的肌电信号;
25.基于所述预处理后的肌电信号生成电机驱动信号;所述电机驱动信号为所述原始肌电信号的同频电信号。
26.在一些实施例中,所述基于所述预处理后的肌电信号生成电机驱动信号,包括:
27.将所述预处理后的肌电信号进行特征分析,得到肌电特征数据;
28.根据预存的肌电信号特征与电机驱动信号对应关系,确定所述肌电信号特征数据对应的电机驱动信号。
29.在一些实施例中,所述方法还包括:
30.获取预设数量的正常喉肌肌电信号,以及每个喉肌肌电信号样本对应的杓状软骨运动状态;
31.对各个所述正常喉肌肌电信号进行特征分析,得到每个所述正常喉肌肌电信号的正常肌电特征数据;
32.基于所述正常肌电特征数据和对应的杓状软骨运动状态,建立所述肌电信号特征与电机驱动信号的对应关系。
33.本技术提供的技术方案带来的有益效果至少包括:本发明实施例提供了一种基于喉肌电信号的杓状软骨运动调节系统,包括依次连接的肌电电极、肌电信号处理器、杓状软骨驱动电机以及电源;肌电电极用于获取健侧喉肌的原始肌电信号,并向所述肌电信号处理器发送;肌电信号处理器用于根据原始肌电信号生成电机驱动信号,并向所述杓状软骨驱动电机发送;所述杓状软骨驱动电机用于基于所述电机驱动信号,带动所述杓状软骨运动。本发明实施例提供的基于喉肌电信号的杓状软骨运动调节系统,能够基于健侧喉肌的肌电信号驱动杓状软骨联动肌肉运动,从而解决单侧喉部肌肉麻痹患者的发声、呼吸、气道不通畅的问题,并避免对患侧喉部肌肉的进一步刺激加重损伤。
附图说明
34.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使
用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
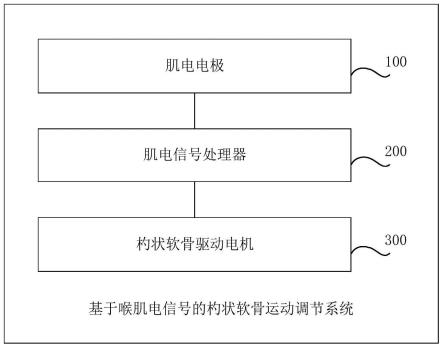
35.图1示出了本技术一个示例性实施例提供的基于喉肌电信号的杓状软骨运动调节系统的结构示意图;
36.图2示出了本技术一个示例性实施例提供的基于喉肌电信号的杓状软骨运动调节系统的又一结构示意图;
37.图3示出了本技术一个示例性实施例提供的基于喉肌电信号的杓状软骨运动调节方法的实现流程示意图。
具体实施方式
38.为使本技术的目的、技术方案和优点更加清楚,下面将接合附图对本技术实施方式作进一步地详细描述。
39.本技术提供的基于喉肌电信号的杓状软骨运动调节系统,可以基于健侧喉肌的电信号控制杓状软骨运动,改善单侧喉部肌肉麻痹患者的发声、呼吸及气道情况。
40.实施例一、
41.图1示出了本技术一个示例性实施例提供的基于喉肌电信号的杓状软骨运动调节系统的结构示意图。
42.参见图1,本技术提供的基于喉肌电信号的杓状软骨运动调节系统包括:
43.肌电电极100、肌电信号处理器200、杓状软骨驱动电机300以及电源。
44.所述肌电电极100一端设置于健侧喉肌的内部,另一端连接所述肌电信号处理器200的输入端;所述肌电信号处理器200的输出端连接所述杓状软骨驱动电机300的控制信号输入端,所述杓状软骨驱动电机300的动端连接杓状软骨,所述电源连接所述杓状软骨驱动电机的供电输入端。
45.所述肌电电极100用于获取所述健侧喉肌的原始肌电信号,并向所述肌电信号处理器200发送所述原始肌电信号。
46.所述肌电信号处理器200用于根据所述原始肌电信号生成电机驱动信号,并向所述杓状软骨驱动电机300发送所述电机驱动信号,所述电机驱动信号为所述原始肌电信号的同频电信号。
47.在一些实施例中,本发明提供的基于喉肌电信号的杓状软骨运动调节系统基于健侧喉肌的肌电信号生成电机驱动信号,电机驱动信号为健侧喉肌肌电信号的同频信号,以使电器带动杓状软骨和患侧肌肉、声带等组织按照健侧肌肉的运动状态而运动,以起到代替患侧肌肉功能的作用。
48.所述杓状软骨驱动电机300用于基于所述电机驱动信号,带动所述杓状软骨运动。
49.所述电源用于为所述杓状软骨驱动电机供电。
50.本发明实施例提供的基于喉肌电信号的杓状软骨运动调节系统能够基于患者健侧的喉肌电信号控制杓状软骨驱动电机,带动杓状软骨运动,使患者在喉部部分单侧肌肉麻痹时仍能保持杓状软骨的正常运动状态,改善患者的发声、吞咽等功能。
51.实施例二、
52.图2示出了本技术一个示例性实施例提供的基于喉肌电信号的杓状软骨运动调节系统的又一结构示意图。
53.参见图2,本技术提供的基于喉肌电信号的杓状软骨运动调节系统包括依次连接的肌电电极100、纳米生物电信号传导线400、肌电信号处理器200以及杓状软骨驱动电机300,以及电源500。
54.在一些实施例中,肌电电极100的一端设置于健侧喉肌的内部,另一端连接所述肌电电信号处理器的输入端。
55.肌电电极100用户获取健侧喉肌的原始肌电信号,并向所述肌电信号处理器200发送所述原始肌电信号。
56.在一些实施例中,肌电电极100包括电极针,所述电极针的头端置于健侧喉肌内部,所述电极针的尾端连接所述肌电信号处理器200的输入端。
57.在一个具体的示例中,电极针的直径为5微米,长为20微米。
58.在一些实施例中,所述肌电电极的尾端与所述肌电信号处理器的输入端通过纳米生物电信号传导线400连接。
59.在一个具体的示例中,纳米生物电信号传导线400为生物纳米管包裹的导电线,其长度为3至4厘米。
60.在一个具体的示例中,生物电信号传导线400包括生物纳米管和传导丝束,其中生物纳米管包裹传导丝束,传导丝束均匀分布于生物纳米管内。
61.可选的,生物电信号传导线400由生物介质制备,能够实现信号传输,且具有柔软抗拉的性质,从而可以植入人体。
62.在一些实施例中,生物电信号传导线400的头端与肌电电极100的尾端一体化连接。
63.在一些实施例中,生物电信号传导线400的尾端与肌电信号处理器200的输入端通过卡槽连接。
64.在一个具体的示例中,肌电信号处理器200的输入端卡槽底部为含金属的电极片,用于接收生物电信号传导线400传输的原始肌电信号。
65.在一些实施例中,所述肌电信号处理器200用于根据所述原始肌电信号生成电机驱动信号,并向所述杓状软骨驱动电机300发送所述电机驱动信号。
66.在一些实施例中,肌电信号处理器200包括预处理模块210和驱动模块220。
67.所述预处理模块210用于将所述原始肌电信号进行预处理,并将预处理后的肌电信号发送至所述驱动模块220。
68.在一些实施例中,所述预处理模块210用于将所述原始肌电信号进行滤波处理和放大处理,生成所述预处理后的肌电信号,并将所述预处理后的肌电信号发送至所述驱动模块220。
69.在一些实施例中,预处理模块能够对原始肌电信号中的杂波和背景噪声进行过滤,留下与肌电信号频率范围一致的信号。
70.所述驱动模块220用于根据预处理后的肌电信号生成所述电机驱动信号,并将所述电机驱动信号发送至所述杓状软骨驱动电机300。
71.在一些实施例中,所述驱动模块220具体用于:
72.将所述预处理后的肌电信号进行特征分析,得到肌电信号特征数据;
73.根据预存的肌电信号特征与电极驱动信号对应关系,确定所述肌电信号特征数据对应的电机驱动信号,并将所述电机驱动信号发送至所述杓状软骨驱动电机300。
74.在一些实施例中,肌电信号处理器200的输出端即驱动模块220的输出端,连接杓状软骨驱动电机300的控制信号输入端,所述杓状软骨驱动电机300的动端连接杓状软骨。
75.杓状软骨驱动电机300用于基于所述电机驱动信号,带动所述杓状软骨运动。
76.在一些实施例中,杓状软骨驱动电机300的动端通过机臂植入杓状软骨内,以带动杓状软骨运动。
77.在一个具体的示例中,机臂植入杓状软骨内的一端为植入体端,植入体端直径6mm,长10mm,表面螺纹区占据长度为6mm至8mm,可以实现将机臂植入杓状软骨内。
78.在一个具体的示例中,电机驱动信号可以包括电机机臂运动的频率、幅度、角度等数据。
79.在一个具体的示例中,杓状软骨驱动电机300带动杓状软骨运动的具体形式可以包括机臂的摆动、旋转、振动及其组合,以带动杓状软骨相应运动。
80.在一些实施例中,电源500包括外接电池。
81.综上所述,本发明实施例提供的基于喉肌电信号的杓状软骨运动调节系统能够基于健侧喉肌的肌电信号驱动杓状软骨联动肌肉运动,从而解决一侧喉部肌肉麻痹患者的发声、呼吸、气道不通畅的问题,并避免对患侧喉部肌肉的进一步刺激加重损伤。
82.实施例三、
83.图3示出了本发明实施例提供的基于喉肌电信号的杓状软骨运动调节方法的实现流程示意图。
84.参见图3,在一些实施例中,本发明实施例提供的基于喉肌电信号的杓状软骨运动调节方法可以包括步骤101至步骤103。
85.步骤101:获取健侧喉肌的原始肌电信号。
86.步骤102:将所述原始肌电信号进行预处理,生成预处理后的肌电信号。
87.步骤103:基于所述预处理后的肌电信号生成电机驱动信号,所述电机驱动信号为所述原始肌电信号的同频电信号。
88.在一些实施例中,步骤103包括:
89.将所述预处理后的肌电信号进行特征分析,得到肌电特征数据;
90.根据预存的肌电信号特征与电机驱动信号对应关系,确定所述肌电信号特征数据对应的电机驱动信号。
91.本发明提供的方法能够基于健侧喉肌的肌电信号驱动杓状软骨联动肌肉运动,从而解决喉部肌肉麻痹患者的发声、呼吸、气道的问题,并避免对喉部肌肉的进一步刺激加重损伤。
92.实施例四、
93.在一些实施例中,本发明实施例提供的方法还可以包括建立肌电信号特征与电机驱动信号对应关系的步骤,包括:
94.步骤201:获取预设数量的正常喉肌肌电信号,以及每个喉肌肌电信号样本对应的杓状软骨运动状态;
95.步骤202:对各个所述正常喉肌肌电信号进行特征分析,得到每个所述正常喉肌肌电信号的正常肌电特征数据;
96.步骤203:基于所述正常肌电特征数据和对应的杓状软骨运动状态,建立所述肌电信号特征与电机驱动信号的对应关系。
97.在一个具体的示例中,步骤201包括:
98.基于喉肌正常的被测对象人群获取预设数量的正常喉肌电信号样本及每个喉肌肌电信号样本对应的杓状软骨运动状态。
99.可选的,以杓状软骨驱动电机300的机臂植入杓状软骨的位置处为坐标原点建立立体坐标系,以描述杓状软骨的运动状态,例如旋转、振动、上升、下降的速度及幅度等。
100.例如,被测对象人数为10人,包含男性、女性及不同年龄层人员。对每位被测人员,均多次获取其呼气、吸气、多种发声情况下的喉肌肌电信号以及对应的杓状软骨运动状态,最终获取到800个喉肌肌电信号样本及对应的杓状软骨运动状态。
101.对获取的样本进行筛选,剔除电信号异常样本和杓状软骨运动状态异常样本。
102.在一些实施例中,步骤202包括:
103.对每个喉肌肌电样本进行特征分析,得到正常肌电特征数据。
104.在一个具体的示例中,正常肌电特征数据可以包括电信号的幅值频率等。
105.对每个杓状软骨运动状态进行分类,从而得到每个正常肌电特征数据对应的杓状软骨运动状态类别。
106.在一个具体的示例中,杓状软骨运动状态类别可以包括低速震动、高速震动、小幅度上升、大幅度上升、小幅度下降、大幅度下降等。
107.可选的,以k均值聚类算法对每个杓状软骨运动状态进行分类。
108.可选的,对每个杓状软骨运动状态类别,以其中的典型运动状态代替该类别中的运动状态。
109.例如,小幅度上升类别中的杓状软骨运动情况为以a0至a1速度上升b0至b1高度,其中a0和a1的差距较小,b0和b1的差距较小,则定义该类别中杓状软骨运动情况为以a速度上升b高度。其中a为该类别中各样本的速度平均值,b为该类别中各样本的高度平均值。
110.通过以上步骤建立正常肌电特征数据与杓状软骨运动状态类别及典型运动状态的对应关系。
111.在一些实施例中,步骤203可以包括:
112.将正常肌电特征数据样本分为训练集和测试集,以训练卷积神经网络分类器,从而建立肌电信号特征与杓状软骨运动状态的对应关系。
113.根据杓状软骨运动状态,确定杓状软骨驱动电机的运动状态,从而确定电机驱动信号。
114.通过以上步骤,可以建立肌电信号特征与电机驱动信号的对应关系,将上述对应关系预存至肌电信号处理器200中,即可实现根据健侧喉肌肌电信号带动杓状软骨运动的功能。
115.上述仅为本技术的可选实施例,并不用以限制本技术,凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1