磁性软体导航机器人及其制备方法和控制方法
1.本发明属于医疗器械技术领域,具体涉及一种磁性软体导航机器人及其制备方法和控制方法。
背景技术:
2.小型化和灵巧性是微创外科手术的两个目标,在微创手术中有利于减少创伤,当前大多数用于神经外科、血管外科以及心脏外科的医用导航导丝主要是金属丝,对医用导管起到引导方向和支持作用,现有的导丝依靠引导段造型,在x光或者核磁共振影响引导下,通过外科手术医生操作来完成转向导航功能。现有的金属导丝虽然手术效果良好,但是存在以下问题:(1)导丝操作依靠外科手术医生的操作,而手术决策更多的取决于医生的经验;(2)硬质金属导丝存在刺破血管、刮伤血管壁的风险;(3)为了操作导丝,医生需要暴露在大量射线环境下,不利于手术医生身体健康等。
3.因此,现有导航导丝有待改进。
技术实现要素:
4.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的一个目的在于提出一种磁性软体导航机器人及其制备方法和控制方法。该磁性软体导航机器人通过控制外界磁场来改变其运行方向,能够减小磁性软体导航机器人刺破血管、刮伤血管壁的风险,提高了介入导航过程中的安全性。本发明中的磁性软体导航机器人通过本身磁矩方向分布与外部磁场配合即可实现复杂精确变形,操作方便,易于实现,克服了依靠人为操作改变方向或直线运行时带来的不便,可以作为一种精确高效的医疗介入手术导航器械。
5.在本发明的一个方面,本发明提出了一种磁性软体导航机器人。根据本发明的实施例,该磁性软体导航机器人包括磁性软体引导段、非磁性软体和金属丝,所述磁性软体引导段的一端与所述非磁性软体的一端连接,所述金属丝沿所述非磁性软体的长度方向嵌入所述非磁性软体中。
6.根据本发明上述实施例的磁性软体导航机器人,通过将金属丝沿非磁性软体的长度方向嵌入非磁性软体中,为磁性软体导航机器人主体提供了一定的刚度,能够起到支撑作用,避免非磁性软体部分过于柔软,阻碍驱动力的正常传递,同时金属丝外周包裹着的较为柔软的软体材料,避免金属丝刺破血管、刮伤血管壁,且非磁性软体的一端与磁性软体引导段的一端连接,该磁性软体引导段不仅具有磁性,可以通过控制外界磁场改变磁性软体引导段的运动方向,使磁性软体导航机器人的运动方向得到改变,从而不需要手动操作导丝来改变导丝的运动方向,而且该磁性软体引导段采用的也是较为柔软的软体材料,所以进一步减小了磁性软体导航机器人刺破血管、刮伤血管壁的风险。
7.另外,根据本发明上述实施例的磁性软体导航机器人还可以具有如下附加技术特征:
8.在本发明的一些实施例中,所述磁性软体引导段包括硬磁材料和聚合物材料,其中,所述聚合物材料包括硅橡胶和/或聚氨酯。由此,可以使磁性软体引导段不仅具有磁性而且较为柔软。
9.在本发明的一些实施例中,所述硬磁材料包括钕铁硼、铁铂合金和钐钴合金中的至少之一。
10.在本发明的一些实施例中,在所述磁性软体引导段中,所述硬磁材料和所述聚合物材料的质量比为1:10-5:1。由此,可以使磁性软体引导段不仅具有磁性而且较为柔软。
11.在本发明的一些实施例中,所述非磁性软体包括所述聚合物材料。由此,可以使非磁性软体较为柔软。
12.在本发明的一些实施例中,所述金属丝包括镍钛合金、铜、银和钛合金中的至少之一。由此,可以避免与外界磁场响应,影响控制效果。
13.在本发明的一些实施例中,所述金属丝的截面尺寸为50-1000μm。
14.本发明的再一个方面,本发明提供了一种制备上述磁性软体导航机器人的方法,根据本发明的实施例,该方法包括:
15.(1)将金属丝插入模具中未固化的聚合物材料中固化,以便得到内嵌有金属丝的非磁性软体;
16.(2)将未固化聚合物材料与硬磁材料混合后置于模具中固化,以便得到磁性软体引导段;
17.(3)将所述内嵌有金属丝的非磁性软体的一端和所述磁性软体引导段的一端连接;
18.(4)对步骤(3)所得机器人的磁性软体引导段进行充磁磁化,以便得到磁性软体导航机器人。
19.由此,采用该方法可以得到上述操作方便、易于实现,能够通过控制外界磁场来改变运动方向,减小刺破血管、刮伤血管壁风险的精确高效的磁性软体导航机器人。
20.本发明的又一个方面,本发明提供了一种上述磁性软体导航机器人或采用上述方法制备的磁性软体导航机器人的控制方法,根据本发明的实施例,该控制方法包括:
21.(1)将磁性软体导航机器人从其磁性软体引导段开始输送至封闭管道;
22.(2)通过外部磁场控制所述磁性软体引导段的运动方向,通过外部传动装置夹持所述非磁性软体上远离所述磁性软体引导段的一端控制所述磁性软体导航机器人的前进或后退。
23.根据本发明上述实施例的控制方法,通过外部磁场控制磁性软体引导段的运动方向,实现磁性软体导航机器人的转弯,通过外部传动装置夹持非磁性软体上远离磁性软体引导段的一端控制磁性软体导航机器人的前进或后退,实现磁性软体导航机器人的直线运动。由此,通过外部磁场和外部传动装置相互配合控制磁性软体导航机器人的转弯和前进后退,实现磁性软体导航机器人灵活运动。进一步的,外部磁场的施加方向与磁性软体引导段中硬磁材料磁化方向成一定夹角。
24.本发明的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
附图说明
25.本发明的上述和/或附加的方面和优点从结合下面附图对实施例的描述中将变得明显和容易理解,其中:
26.图1是本发明实施例的磁性软体导航机器人结构示意图;
27.图2是本发明实施例的磁性软体导航机器人制备方法流程图;
28.图3是本发明实施例的三维电磁平台结构示意图;
29.图4是本发明实施例的传动装置的主视图;
30.图5是本发明实施例的传动装置的俯视图。
具体实施方式
31.下面详细描述本发明的实施例,旨在用于解释本发明,而不能理解为对本发明的限制。
32.在本发明的一个方面,本发明提出了一种磁性软体导航机器人。根据本发明的实施例,参考图1,该磁性软体导航机器人包括磁性软体引导段200、非磁性软体100和金属丝300。
33.根据本发明上述实施例的磁性软体导航机器人,通过将金属丝300沿非磁性软体100的长度方向嵌入非磁性软体100中,为磁性软体导航机器人主体提供了一定的刚度,能够起到支撑作用,避免非磁性软体100部分过于柔软,阻碍驱动力的正常传递,同时金属丝300外周包裹较为柔软的软体材料,避免了金属丝刺破血管、刮伤血管壁,且非磁性软体100的一端与磁性软体引导段200的一端连接,该磁性软体引导段200不仅具有磁性,可以通过控制外界磁场改变磁性软体引导段200的运行方向,来带动磁性软体导航机器人的运动方向,从而不需要人为操作导丝来改变导丝的运动方向,而且该磁性软体引导段200采用的也是较为柔软的软体材料,所以进一步减小了磁性软体导航机器人刺破血管、刮伤血管壁的风险。由此,该磁性软体导航机器人通过控制外界磁场来改变其运动方向,减小了磁性软体导航机器人刺破血管、刮伤血管壁的风险,提高了介入导航过程中的安全性。
34.根据本发明的实施例,磁性软体引导段200包括硬磁材料和聚合物材料。在具有特定形状的磁化模板内对磁性材料充磁后使磁性软体引导段具有磁性且具有定向的磁化方向,聚合物材料使磁性软体引导段较为柔软。由此,采用本技术的磁性软体引导段200不仅可以通过外部磁场控制运动方向,而且质地较为柔软,防止刺破血管、刮伤血管壁。进一步地,非磁性软体100包括聚合物材料。由此,可以使非磁性软体100较为柔软。
35.根据本发明的实施例,在磁性软体引导段200中,硬磁材料和聚合物材料的质量比为1:10-5:1,发明人发现,若硬磁材料和聚合物材料的质量比大于5:1,则所制成的磁性软体引导段200具有较大的硬度,不利于外部磁场控制引导段变形弯曲,若硬磁材料和聚合物材料的质量比小于1:10,则需要用较大的外部磁场才能够驱动磁性软体引导段达到预设变形,不利于磁性软体引导段的灵活变形,且产生较大的磁场也增加了设备成本和控制难度。由此,采用本技术硬磁材料和聚合物材料的质量比为1:10-5:1的磁性软体引导段200,可以使磁性软体引导段200在一定大小的外部磁场驱动下实现灵活精确的弯曲变形。
36.需要说明的是,本领域技术人员能够理解的是,硬磁材料、聚合物材料和金属丝是本领域常规材料,硬磁材料只要能被磁化后有磁性即可,聚合物材料性质稳定,质地较柔
软,和金属丝可以配合使用即可,金属丝稳定且不会被磁化或影响外部磁场即可,本领域技术人员可根据实际对硬磁材料、聚合物材料和金属丝的具体类型进行选择。例如,聚合物材料包括硅橡胶和/或聚氨酯;硬磁材料包括钕铁硼、铁铂合金和钐钴合金中的至少之一,优选尺寸为0.1~100μm的钕铁硼,更优选尺寸为5μm的钕铁硼;金属丝包括镍钛合金、铜、银和钛合金中的至少之一,并且金属丝300的截面尺寸为50-1000μm。同时,需要说明的是,对于金属丝300、非磁性软体100和磁性软体引导段200的截面形状,本领域技术人员可根据实际进行选择,例如圆形、椭圆形或矩形,此处不再赘述。
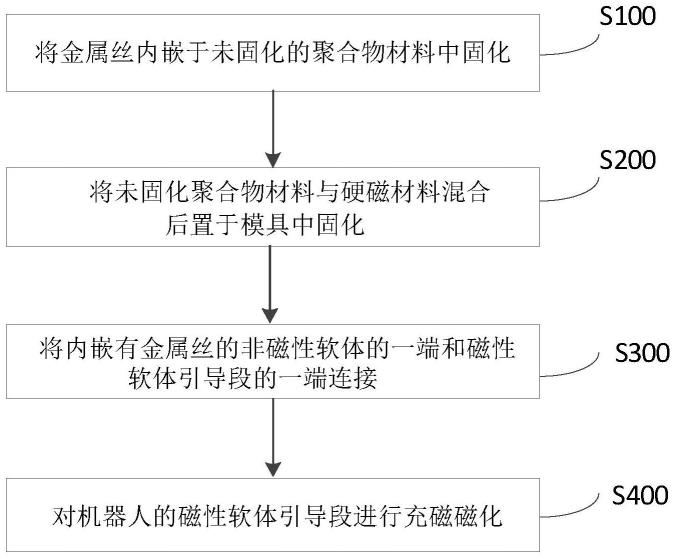
37.本发明的再一个方面,本发明提供了一种制备上述磁性软体导航机器人的方法。根据本发明的实施例,参考图2,该方法包括:
38.s100:将金属丝内嵌于未固化的聚合物材料中固化
39.该步骤中,将金属丝插入模具中未固化的聚合物材料中固化,得到内嵌有金属丝的非磁性软体。因为金属丝外周包裹较为柔软的软体材料,避免了金属丝刺破血管、刮伤血管壁。本领域技术人员可以理解的是,为了使聚合物材料在金属丝的外周分布更加均匀,控制效果更好,优选金属丝的截面中心与得到的非磁性软体的截面中心重合;同时本领域技术人员可根据使用的聚合材料的类型和实际情况,对聚合物固化的时间进行选择,此处不在赘述。
40.s200:将未固化聚合物材料与硬磁材料混合后置于模具中固化
41.该步骤中,将未固化聚合物材料与硬磁材料混合后置于模具中固化,以便得到磁性软体引导段。磁性材料可通过磁化具有磁性且具有定向的磁化方向,使未固化聚合物材料与硬磁材料混合制备的磁性软体引导段,不仅具有磁性,而且质地柔软。
42.s300:将内嵌有金属丝的非磁性软体的一端和磁性软体引导段的一端连接
43.该步骤中,将内嵌有金属丝的非磁性软体的一端和磁性软体引导段的一端连接,使内嵌有金属丝的非磁性软体和磁性软体引导段结合为一体,相互配合实现运动。本领域技术人员可以理解的是,非磁性软体和磁性软体引导段的连接方式是本领域常规方式,本领域技术人员可根据实际选择,例如,在制备非磁性软体和磁性软体引导段的过程中,利用聚合材料的固化作用,将二者连接在一起。或先分别制备好非磁性软体和磁性软体引导段,然后用本领域常规的粘接剂将二者粘接在一起。
44.s400:对机器人的磁性软体引导段进行充磁磁化
45.该步骤中,将s300所得机器人的磁性软体引导段放置于磁化模板中进行充磁磁化,磁性软体引导段磁化方向沿磁化模板外形中心法线分布,从而使得磁性软体引导段具有磁性且具有定向的磁化方向,从而得到磁性软体导航机器人。需要说明的是,磁性材料充磁及其充磁装置是本领域常规技术,本领域技术人员可根据实际进行选择,此处不再赘述。
46.由此,采用该方法可以得到上述操作方便、易于实现,能够通过控制外界磁场来改变运动方向,减小刺破血管、刮伤血管壁风险的精确高效的磁性软体导航机器人。
47.本发明的又一个方面,本发明提供了上述磁性软体导航机器人或采用上述方法制备的磁性软体导航机器人的控制方法。根据本发明的实施例,参考图1,该磁性软体导航机器人的控制方法如下:
48.(1)将磁性软体导航机器人从其磁性软体引导段200开始输送至封闭管道,以便后续磁性软体导航机器人在密封管道的运动。需要说明的是,密封管道不限于血管、心脏动脉
等,而且包括常见的仪器或装置中的密封长管道等,并且该磁性软体导航机器人用于非治疗目的。
49.(2)通过外部磁场控制磁性软体引导段200的运动方向,实现磁性软体导航机器人的转弯,通过外部传动装置夹持非磁性软体100上远离磁性软体引导段200的一端控制磁性软体导航机器人的前进或后退,实现磁性软体导航机器人的直线运动。
50.需要说明的是,外部磁场的施加方向与磁性软体引导段200中硬磁材料磁化方向成一定夹角,并根据需要进入封闭管道的角度调节磁性软体引导段的转向程度。同时,本领域技术人员能够理解的是,外部磁场只要能提供磁场,控制磁性软体引导段200运动即可,外部传动装置只要能夹持非磁性软体100直线运动即可,本领域技术人员可根据实际情况对外部磁场和外部传动装置的具体类型进行选择。
51.例如,根据本发明的实施例,参考图3,可将三维电磁平台400作为外部磁场,对磁性软体导航机器人施加磁场,控制磁性软体导航机器人的运动方向,在三维电磁平台400外框架上安装有外部传动装置500,来控制磁性软体导航机器人的直线运动。
52.具体的,参考图4和图5,传动装置500包括底部支架502、电机501和摩擦轮503,底部支架502呈凸字形,且安装在三维电磁平台400外框架上,在底部支架502凸出部位的两侧平台上分别安装电机501,在底部支架502凸出部位的中部设有凹槽,在凹槽内设有两个摩擦轮503,且两个摩擦轮503轴向平行,两个电机501分别控制两个摩擦轮503的转动。将磁性软体导航机器人的非磁性软体100上远离磁性软体引导段200的一端放置于两个摩擦轮503之间,两个摩擦轮503夹持着非磁性软体100,通过两个摩擦轮503的转动带动着非磁性软体100的运动,从而控制磁性软体导航机器人在密闭空间内的直线运动。
53.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
54.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1