一种前臂混合畸形智能规划方法及系统
1.本发明涉及一种前臂混合畸形规划方法,具体为一种前臂混合畸形智能规划方法及系统,属于智能诊疗系统技术领域。
背景技术:
2.前臂是人体实现上肢旋前、旋后功能的部位,由桡骨和尺骨组成。前臂骨非解剖位置的创伤后愈合(畸形愈合)或先天性骨骼变形,会导致患者手臂活动范围受限、握力降低及远端桡尺关节不稳定等功能障碍,并产生疼痛。如果治疗不当,会导致严重的骨关节炎等退行性病理。
3.成角旋转混合畸形是前臂骨畸形种的一种常见畸形类型,目前外科治疗前臂骨成角畸形的金标准是通过截骨矫正术恢复正常的解剖结构,临床医生将病理性骨切成两个或更多的骨碎片,重新排列到合理的生理位置,并通过接骨板或内植物稳固,这种矫形手术实施复杂,需要临床医生制定精密的术前规划方案。
4.现有技术中:1)术前规划是临床医生根据自己的临床经验,基于x光片及ct等影像学资料,遵循截骨矫形的基本原则,人工计算截骨位置和矫形角度,以达到肢体矫形的目的,但这种截骨矫形方式由于需要临床医生手工绘图计算,因此存在术前无法科学预测手术效果、手术精准性不够、不同医生手术均质性较差等问题,进而影响最优化手术方案的制定;
5.2)随着计算机辅助设计在医学上的应用发展,许多计算机辅助术前截骨矫形软件系统被开发,其中,基于二维的计算机辅助截骨解决了部分简单畸形的截骨矫形术前规划工作,能自动计算出截骨角度,复位截骨后的骨段,但这些系统目前仍存在一些不足之处:针对多平面畸形及复杂混合畸形,二维医学影像由于不能反映骨畸形的三维固有特性,仍然需要临床医生依据经验进行操作,耗费临床医生大量的时间和精力,并且获得的数据也不够精准;
6.3)基于三维计算机辅助截骨的术前手工规划虽然可以直观分析多平面复杂混合畸形,并进行截骨矫正,却需要临床医生反复试验、手动计算验证,且涉及在三维空间多次手动调整,产生不必要的临床成本。
技术实现要素:
7.本发明的目的就在于为了解决上述至少一个技术问题而提供一种前臂混合畸形智能规划方法及系统,通过患者畸形骨及对侧健康骨的三维模型,实现畸形骨的截骨及复位矫形。
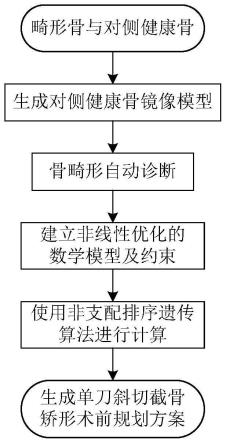
8.本发明通过以下技术方案来实现上述目的:一种前臂混合畸形智能规划方法,包括以下步骤:
9.步骤一:建立畸形前臂骨的对侧健康骨镜像模型,使其成为矫形复位的重建模板;
10.步骤二:对前臂骨的桡、尺骨设置关节解剖区域,分别对桡、尺骨的远、近端进行基
于解剖区域的权重配准,得到远、近端分别配准的矩阵;
11.步骤三:根据远、近端综合配准矩阵计算变换矩阵中沿骨长轴的位移量;
12.步骤四:将位移量作为畸形前臂骨中畸形骨的两侧差异量,补偿重建模板差异,构建新的重建模板;
13.步骤五:将前臂畸形骨的远、近端解剖区域分别与新的重建模板配准,设定畸形阈值,计算前臂畸形骨的畸形区域;
14.步骤六:根据前臂畸形骨与新的重建模板的配准变换矩阵,计算复位旋转轴方向及复位旋转角;
15.步骤七:以截骨位置和截骨面内平移量为控制变量约束,以前臂畸形骨的关节解剖区域对齐为优化目标之一,以单刀斜切截骨处两个骨段的骨接触重叠面积为另一优化目标,使用非支配排序遗传算法进行多目标优化,优化迭代计算出最优的截骨位置及面内平移量。
16.作为本发明再进一步的方案:所述步骤一中,畸形前臂骨的对侧健康骨镜像模型的生成是通过以空间中任意一个二维坐标面为参考面,求取每一坐标点关于参考面的对称点,根据点云数据生成镜像模型。
17.作为本发明再进一步的方案:所述前臂骨中的尺骨远、近端关节解剖区域定义为尺骨沿其骨长轴的远、近端20%部分,权重为设为1;桡骨近端关节解剖区域定义为沿其骨长轴的近端20%部分,权重设为1;桡骨远端关节解剖区域由于与腕部相连,其解剖区域使用7个解剖点搜索其邻域内50个点进行定义,这7个解剖点为乙状切口背侧远端边缘、掌侧乙状结肠切迹远端边缘、桡骨远端茎突中心、月骨小关节中心、李斯特的结节和桡骨中心的分水岭线,7个解剖点所定义的解剖区域的对齐权重分别为:0.18、0.18、0.18、0.18、0.18、0.05和0.05;配准方法使用基于解剖区域权重的迭代最近点算法。
18.作为本发明再进一步的方案:所述步骤四中,前臂骨两侧差异量的关系为:两侧桡骨长度差等于0.98倍的两侧尺骨长度差,通过健康骨(桡骨或尺骨)位移量差值,计算畸形骨的重建模板应具有的长度,并将畸形骨的对侧骨镜像模型沿其骨长轴进行缩放。
19.作为本发明再进一步的方案:所述步骤五中,将畸形前臂中的畸形骨与其重建模板在近端基于关节解剖区域权重配准后,沿骨长轴以0.1mm为步长对骨模型进行离散,对每个步长内的畸形骨与重建模板计算均方根误差,畸形骨与其重建模板在远端进行相同的操作;配准后,设定畸形阈值为其均方根误差超过最小均方根误差的15%,以此阈值确定骨畸形范围。
20.作为本发明再进一步的方案:所述步骤六中,畸形骨近端配准矩阵为m
p
,畸形骨远端配准矩阵为md,以m
p-1*md为综合配准矩阵,使用罗格里格斯公式计算复位旋转轴方向及复位旋转角度。
21.作为本发明再进一步的方案:所述步骤七中,空间中定义一个平面需要位置及法向6个参数,在单刀斜切截骨中,截骨平面法向与畸形骨复位旋转轴同向,且将截骨平面位置沿畸形骨的重建模板骨长轴进行移动,因此只需通过骨长轴上某一点位置即可确定截骨平面方位,确定截骨面后,远端被截骨段通过在截骨面内平移进行矫形复位,因此多目标优化算法的控制变量为截骨位置,截骨面内沿二维坐标系移动的位移量。
22.作为本发明再进一步的方案:所述步骤七中,截骨面二维坐标系使用主成分分析
方法进行确定。
23.一种前臂混合畸形智能规划系统,该系统包括:
24.模型空间变换模块:用于在智能规划前对骨骼模型的空间位置进行调整;
25.模型配准模块:通过手动选取解剖位置或自动计算解剖位置,根据不同解剖区域的不同权重,使用基于解剖区域不同权重的迭代最近点算法对骨骼模型进行配准;
26.骨畸形自动诊断模块:基于解剖区域配准,并根据设定的畸形阈值,自动计算畸形前臂中畸形骨的骨畸形区域
27.骨模型切割模块:可以自定义截骨面对骨模型进行切割;
28.成角与旋转混合畸形单刀截骨矫形优化模块:以截骨位置和截骨面内平移量为控制变量约束,以畸形骨远端关节解剖区域关节对齐误差最小和骨接触面积重叠率最大为目标,使用非支配排序遗传算法进行优化,形成矫正前臂成角与旋转混合畸形的单刀截骨术前自动规划方案。
29.本发明的有益效果是:使用基于关节解剖区域的配准方法计算畸形前臂与健康对侧的差异量,构建畸形骨的重建模板,计算畸形骨的畸形区域;以畸形区域为截骨范围约束,计算使临床目标最优的截骨位置及面内平移量,自动生成临床目标所需的解决方案,提高前臂成角与旋转混合畸形的截骨矫形术前规划效果及精度,并大幅减少术前规划所需时间,实现术前规划的智能化。
附图说明
30.图1是本发明实施例的术前智能规划软件系统总结构示意图;
31.图2是本发明实施例的骨畸形自动诊断模块示意图;
32.图3是本发明实施例的前臂畸形骨对对侧前臂骨配准示意图;
33.图4是本发明实施例的前臂成角与混合畸形单刀斜切自动截骨模块示意图;
34.图5是本发明实施例的截骨处骨接触面积示意图;
35.图6是本发明实施例的单刀斜切截骨矫形示意图。
具体实施方式
36.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
37.实施例一
38.如图1所示,一种前臂混合畸形智能规划方法,包括以下步骤:
39.步骤一:建立畸形前臂骨的对侧健康骨镜像模型,使其成为矫形复位的重建模板;
40.步骤二:对前臂骨的桡、尺骨设置关节解剖区域,并进行配准,根据远、近端综合配准矩阵计算变换矩阵中沿骨长轴的位移量;
41.所述步骤二中,前臂骨中桡骨远端关节解剖区域,是由临床上7个解剖特征点定义的7个解剖区域共同组成。
42.步骤三:将位移量作为畸形前臂中畸形骨的两侧差异量,补偿重建模板差异,构建
新的重建模板;
43.所述步骤三中,补偿重建模板差异的方法包括:
44.(1)计算畸形前臂的桡骨远端关节配准矩阵、桡骨近端关节配准矩阵、尺骨远端配准矩阵及尺骨近端配准矩阵;
45.(2)计算桡骨配准过程中沿其重建模板骨长轴的位移,计算尺骨配准过程中沿其重建模板骨长轴的位移;
46.(3)依据双侧前臂桡骨差异与尺骨差异的关系式,对畸形桡骨或畸形尺骨沿骨长轴缩放,补偿重建模板差异。
47.步骤四:计算前臂畸形骨的畸形区域;
48.所述步骤四中,所述的畸形区域的自动诊断方法包括:
49.(1)沿着畸形骨模型的骨长轴将配准的畸形骨模型和重建目标模型的点集,以一定的步长进行空间离散处理;
50.(2)每一个步长内包含有畸形骨模型和重建目标模型的点集,计算并搜寻畸形骨模型点集中每一点与重建目标模型点集中欧氏距离最小的点,并计算它们的均方根误差rmse。
51.(3)以偏离均方根误差最小值15%来确定畸形区域。
52.步骤五:计算畸形骨复位旋转轴及旋转角度;
53.所述步骤五中,所述的复位旋转轴及旋转角度,是基于桡骨远端不同权重的解剖区域配准计算得到。
54.步骤六:使用非支配排序遗传算法对前臂成角与旋转混合畸形进行优化计算,自动生成最优的单刀斜切截骨术前规划方案;
55.所述步骤六中,所述使用非支配排序遗传算法,对前臂成角与旋转混合畸形进行自动单刀斜切截骨矫形的方法包括:
56.(1)设置畸形骨远端关节解剖区域的对齐误差目标函数,骨接触面积重叠率目标函数,建立截骨位置约束及截骨面内平移量约束;
57.(2)优化过程中的每一代需要对远端被截骨段进行平移,并对骨接触面积重叠率进行计算。
58.在本发明实施例中,所述骨接触面积重叠率目标函数是通过相对骨接触面积计算。
59.实施例二
60.如图2至图6所示,一种前臂混合畸形智能规划方法,包括以下步骤:
61.a1、根据骨骼模型建立骨长轴,使用模型配准模块计算前臂两侧差异量,补偿重建模板,以合适的步长离散关节解剖区域配准后的模型,计算模型点集的均方根误差,确定骨畸形区域,并通过配准畸形骨与重建模板计算复位旋转轴与旋转角度;
62.a2、确定骨畸形自动诊断的目的,是使用确定的骨畸形范围作为截骨位置选择的约束,不同的截骨位置会导致复位误差不同,因此骨畸形自动诊断确定截骨平面大致范围为非支配排序遗传算法提供参数范围约束。
63.畸形前臂中畸形桡骨截骨矫形
64.以下详细说明:
65.将畸形前臂的对侧健康前臂导入系统中,以stl模型的方式呈现,将三维世界坐标系中的xoz平面作为对称平面,生成对侧健康前臂的镜像模型,完成畸形前臂重建模板的建立。
66.将畸形前臂与重建模板同时导入系统中,对畸形前臂中的桡、尺骨与重建模板的桡、尺骨,进行基于解剖区域权重的配准,通过配准矩阵计算两侧差异量,对重建模板进行补偿,其步骤如下:
67.step1:计算重建模板健康桡、尺骨的惯性矩张量,由惯性矩张量确定的惯量主轴为骨长轴方向,并通过桡、尺骨质心;
68.step2:前臂中桡骨近端、尺骨近端、尺骨远端的解剖区域,由沿其骨长轴的20%的区域确定,桡骨远端选定7个临床解剖点,以每个临床解剖点为中心,使用最近邻搜索算法搜索其周围的50个点作为桡骨远端的解剖区域;
69.step3:在前臂骨关节解剖区域的对齐配准中,桡骨近端、尺骨近端和尺骨远端使用关节区域整体配准即可,桡骨远端由于与腕关节及尺骨远端关节相连,其关节面的对齐比长骨区域的对齐更加重要,将桡骨远端七个解剖点确定的解剖区域设置不同权重,关节面上的5个解剖区域对齐权重设为0.18,长骨区域的2个解剖区域对齐权重设为0.05,对齐配准效果如图3所示,并计算其中的桡骨近端配准矩阵m
rp
,桡骨远端配准矩阵m
rd
,尺骨近端配准矩阵m
up
,尺骨远端配准矩阵m
ud
;
70.step4:计算桡骨复位矩阵mr=m
rp-1*mrd
,尺骨复位矩阵m
up-1
*m
ud
,根据尺骨复位矩阵中的位移分量,计算沿健康尺骨长轴的两侧桡骨差异δz
ulna
=2.31mm,根据两侧前臂尺桡骨差异公式δz
radius
=0.98*δz
ulna
,计算畸形桡骨重建模板需要沿其骨长轴进行缩放的量δz
radius
=2.26mm,并对桡骨重建模板进行缩放。
71.构建补偿差异的畸形桡骨重建模板后,沿畸形桡骨重建模板骨长轴,分别选取畸形桡骨远、近端各20%点集,重建模板远、近端各20%点集,并将远、近端分别配准,以0.1mm的步长对配准后的骨模型进行离散划分,计算每一个步长内畸形骨与重建模板的均方根误差,以均方根误差超过最小值的15%为畸形阈值,确定畸形桡骨的畸形范围(122.5mm~133.8mm)。
72.完成畸形桡骨的畸形范围计算后,以step3中同样的方法,对畸形桡骨与重建模板计算综合配准矩阵m
rp
,提取变换矩阵m
rp
中的旋转轴方向向量rv=(0.3,0.4,0.28)及旋转角度α=13.7
°
。
73.确定畸形区域后就可以大致确定一个切割平面的范围,但具体在何处进行单刀斜切截骨,还需对截骨面位置及截骨面内平移量进行优化计算。本发明中的优化处理,是基于非支配排序遗传算法实现,如图4所示,包括以下步骤:
74.b1、建立优化计算中的桡骨远端关节解剖区域对齐误差目标函数、截骨处骨接触面积重叠率目标函数及约束;
75.b2、对非支配排序遗传算法设置遗传参数,优化迭代计算最优的截骨位置及面内平移量。
76.详细说明如下:
77.将已计算的骨畸形区域范围(122.5mm~133.8mm)作为截骨位置约束,将骨接触面积重叠率大于50%作为面内平移量约束,建立桡骨远端关节解剖区域对齐误差目标函数如
下式:
[0078][0079]
式中,k表示解剖特征区域的个数,w表示权重,分配比例如式(6),区域1到区域5权重值各为0.18,区域6和区域7各为0.05。rc表示提取旋转轴的旋转矩阵,p表示畸形骨解剖区域的点,q表示重建模板解剖区域的点。建立骨接触面积重叠率如下式:
[0080][0081]
其中,ar表示骨接触面积重叠率,a
min
表示最小骨接触面积重叠率,骨接触面积示意图如图5所示,其中xoy为截骨面内二维坐标系。
[0082]
通过将群体大小设为200、迭代次数设为250、交叉变异概率设为0.9及突变概率设为0.08。在每一次迭代过程中,对远端被截骨段进行旋转处理,旋转矩阵为已计算的综合配准矩阵m
rp
中的旋转分量,并通过对远端被截骨段进行面内平移,计算每一代的f1和f2。
[0083]
本实例经过250次迭代计算,选出最优的截骨位置为141.3mm,面内沿x轴及y轴的平移量分别为2.5mm和6.8mm,达到的对齐目标均方根误差为0.53mm,骨接触面积重叠率为90.88%。本实例的截骨矫形前后对比如图6所示。
[0084]
实施例三
[0085]
一种前臂混合畸形智能规划系统,该系统包括:
[0086]
模型空间变换模块:用于在智能规划前对骨骼模型的空间位置进行调整;
[0087]
模型配准模块:通过手动选取解剖位置或自动计算解剖位置,根据不同解剖区域的不同权重,使用基于解剖区域不同权重的迭代最近点算法对骨骼模型进行配准;
[0088]
骨畸形自动诊断模块:基于解剖区域配准,并根据设定的畸形阈值,自动计算畸形前臂中畸形骨的骨畸形区域;
[0089]
骨模型切割模块:可以自定义截骨面对骨模型进行切割;
[0090]
成角与旋转混合畸形单刀截骨矫形优化模块:以截骨位置和截骨面内平移量为控制变量约束,以畸形骨远端关节解剖区域关节对齐误差最小和骨接触面积重叠率最大为目标,使用非支配排序遗传算法进行优化,形成矫正前臂成角与旋转混合畸形的单刀截骨术前自动规划方案。
[0091]
工作原理:使用基于关节解剖区域的配准方法计算畸形前臂与健康对侧的差异量,构建畸形骨的重建模板,计算畸形骨的畸形区域;以畸形区域为截骨范围约束,计算使临床目标最优的截骨位置及面内平移量,自动生成临床目标所需的解决方案,提高前臂成角与旋转混合畸形的截骨矫形术前规划效果及精度。
[0092]
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
[0093]
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当
将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1