一种基于肌电信号的上肢肘关节角度估计方法及系统
1.本发明涉及模式识别领域,更具体的说是涉及一种基于肌电信号的上肢肘关节角度估计方法及系统。
背景技术:
2.偏瘫是一种由神经损伤引起的运动功能障碍。偏瘫患者的临床治疗主要是由康复治疗师指导下,一对一的康复治疗。这种方式费时,成本高。因此,迫切需要一种新的、高效的康复疗法来弥补传统康复训练的不足。康复外骨骼机器人将机器人技术与康复医学结合,可以使康复治疗师摆脱主要的体力劳动,并为病人制定更好的康复方案,提高康复效果。
3.康复训练有主动和被动两种。研究表明,主动康复比被动康复具有更有效的康复效果。因此,提取患者运动意图,并融入到康复外骨骼机器人中,是一种有效提高患者主观能动性,进而实现更高效康复效果的方法。
4.肌电信号是肌肉运动和神经运动的综合结果。表面肌电信号(semg)包含了丰富的人体运动信息,这些信息包括关节运动的动作模式、动作大小等,且其采集过程对人体是方便无害的。
5.提取肘关节运动过程中的肌电信号和关节运动角度数据,建立肌电信号和角度数据的映射,从而实现基于肌电信号对上肢肘关节运动的估计。现有的基于肌电信号估计上肢肘关节的研究中,大多采用svr、神经网络、状态空间隐马尔可夫、随机森林、xgboost等回归方法。但估计的准确性有待进一步提高。
技术实现要素:
6.有鉴于此,本发明提供了一种基于肌电信号的上肢肘关节角度估计方法及系统,提取肘关节运动过程中的肌电信号和关节运动角度数据,建立肌电信号和角度数据的映射,从而实现基于肌电信号对上肢肘关节运动的估计。
7.为了实现上述目的,本发明采用如下技术方案:
8.公开了一种基于肌电信号的上肢肘关节角度估计方法,其特征在于,包括以下步骤:
9.采集肌电信号以及肌电信号对应的肘关节运动角度;
10.对肌电信号进行预处理,并提取肌电信号的特征;
11.将肌电信号的特征以及肘关节运动角度作为样本数据输入到iaco-grnn网络中;
12.多次迭代,利用改进的蚁群算法找出最优光滑因子,获得iaco-grnn模型;
13.将待检测肌电信号输入到iaco-grnn模型,得到对应的上肢肘关节角度。
14.可选的,利用改进的蚁群算法找出最优光滑因子,具体步骤如下:
15.s1:调用grnn,并导入样本数据;初始化蚁群优化算法参数;
16.s2:将蚂蚁置于起点,开始迭代;
17.s3:判断蚂蚁是否到达目标点,若是,则停止搜索,迭代结束;
18.否则跳转到s2,直到到达目标点;
19.s4:在所有蚂蚁到达目标点后,结束迭代,记下所有蚂蚁的路线长度,选取最短路径;
20.s5:判断最短路径的迭代次数是否达到最大迭代次数,若是,则输出最优光滑因子;若否,则跳转到s2,继续迭代,直到达到最大迭代次数。
21.可选的,将广义回归模型的测试数据的rmse作为蚁群算法的适应度函数,计算路径值,rmse计算公式如下:
[0022][0023]
其中pk表示预测值,mk表示测量值。
[0024]
可选的,还包括在所有蚂蚁完成一次完整的路径构建后,找出本次迭代最优路径长度l
best
、最差路径长度l
worst
、平均路径长度l
averge
。对路径长度小于l
averge
的较优路径进行适当的加强。对路径长度大于l
averge
的较差路径进行适当的减弱;其中,信息素差异性变化量的更新如下式所示,其中η取1.2:
[0025][0026]
其中,τ
ij
(t+1)表示第t+1时间,节点i和节点j之间的信息素量;τ
ij
(t)表示第t时间,节点i和节点j之间的信息素量;ρ表示信息素挥发系数;δ
τij
表示本次循环中节点i和节点j之间的信息素增量和;表示蚂蚁k在本次循环中留在节点i和节点j之间的信息素量。lk表示蚂蚁k在本次循环中的迭代路径长度;η表示调整因子,调整路径优化的程度,数值越大,优化的程度越强,反之则越弱。
[0027]
可选的,对肌电信号进行预处理包括:使用4阶的butterworth带通滤波器对采集到的肌电信号进行20-500hz的带通滤波;使用49hz的陷波滤波器对肌电信号进行处理。
[0028]
可选的,肌电信号的特征包括:均方根rms和绝对值积分平均值iav,计算公式如下:
[0029][0030][0031]
其中n为采样点数,xi为第i个样本的数值。
[0032]
还公开了一种基于肌电信号的上肢肘关节角度估计系统,包括:
[0033]
获取样本数据模块:用于采集肌电信号以及肌电信号对应的肘关节运动角度;
[0034]
数据预处理模块:用于对肌电信号进行预处理,并提取肌电信号的特征;
[0035]
iaco-grnn训练模块:用于将肌电信号的特征以及肘关节运动角度作为样本数据输入到iaco-grnn网络中;
[0036]
iaco-grnn模型建立模块:用于多次迭代,利用改进的蚁群算法找出最优光滑因子,获得iaco-grnn模型;
[0037]
上肢肘关节预测模块:将待检测肌电信号输入到iaco-grnn模型,得到对应的上肢肘关节角度。
[0038]
经由上述的技术方案可知,与现有技术相比,本发明公开提供了一种基于肌电信号的上肢肘关节角度估计方法及系统,具有以下有益效果:
[0039]
1、提出一种基于肌电信号的上肢肘关节估计方法,仅使用两个肌肉位置的肌电信号,实现精准的肘关节角度估计。
[0040]
2、提出一种改进的信息素差异化更新策略,提高蚁群算法的收敛速度。
[0041]
3、将改进蚁群算法和广义回归神经网络结合,提出一种改进蚁群优化-广义回归神经网络算法(iaco-grnn)。实现快速和准确的找到广义回归神经网络的最优光滑因子。
附图说明
[0042]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据提供的附图获得其他的附图。
[0043]
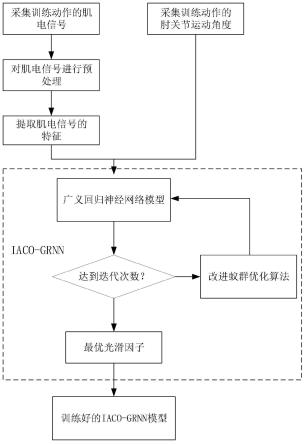
图1为本发明的iaco-grnn网络训练过程意图;
[0044]
图2为本发明的主要步骤示意图。
具体实施方式
[0045]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0046]
本发明实施例公开了一种基于肌电信号的上肢肘关节角度估计方法,如图2所示,包括以下步骤:采集人体上肢相关肌肉的肌电信号;然后对肌电信号进行预处理;进而提取肌电信号的特征;接着将提取到的特征输入到训练好的iaco-grnn模型中;最后通过iaco-grnn输出估计结果。
[0047]
其中本实施例主要针对的是肘关节,因此采集的肌肉是肱二头肌和肱三头肌。肌电传感器使用的是美国delsys公司的trigno
tm wirless采集设备,trigno
tm wirless设备的基站主要用作delsys传感器和设备软件之间“中转站”。基站通过wifi通信方式与delsys传感器进行信号传输。delsys传感器采样频率为2000hz。内置带通滤算法(20-449hz)、平行杆技术能有效去除运动伪迹和高频噪声。
[0048]
其中,对肌电信号进行的预处理包括:使用4阶的butterworth带通滤波器对采集到的肌电信号进行20-500hz的带通滤波;使用49hz的陷波滤波器对肌电信号进行处理,以去除电源引起的49hz工频干扰。
[0049]
其中,肌电信号的特征包括:均方根(rms)和绝对值积分平均值
[0050]
(iav)。
[0051][0052][0053]
其中n为采样点数,xi为第i个样本的数值。
[0054]
grnn由输入层、模式层、求和层和输出层组成。输入为x=[x1,x2,
…
,x
t
],输出为y=[y1,y2,
…
,y
t
]。输入层用于接收样本的数据。输入层的神经元个数就等于输入样本的维度。模式层用于对样本进行初步分类。模式层的神经元个数等于学习样本的个数n。模式层各个神经元的计算一般采用高斯函数,如下式所示:
[0055][0056]
其中,x为网络输入变量;xi为第i个神经元的学习样本。
[0057]
求和层用于对模式层输出进行求和。求合层包含分母单元和分子单元。分母单元为模式层输出的代数和,如下式所示:
[0058][0059]
分子单元用于计算模式层输出的加权和,如下式所示:
[0060][0061]
分母单元只有一个。分子单元的个数与模型最后输出个数相同。其中权值为各学习样本的对应真实值。输出层用于最后结果的输出。输出层神经元的个数为样本输出量的维度k。用求合层对应的分子单元除以分母单元即可求出对应的预测结果。如神经元j输出对应的就是预测结果y(x)的第j个元素:
[0062][0063]
本实施例中,样本输入为x=[x1,x2,
…
,x
t
]
t
.t取2,即两个肌肉肌电信号数据。样本输出为y=[f1,f2,
…
,fk]
t
,k取1,输出为关节角度值。
[0064]
grnn在训练过程中不用调整神经元之间的连接权值,而是通过改变光滑参数σ来优化模型。由式3可知,当σ取值较大时,pi可能会趋近于零。当σ取值较小时,pi可能会与学习样本的期望值很接近,容易过拟合。因此确定最优光滑因子σ对grnn的预测结果具有重大影响。
[0065]
本实施例采用蚁群算法找出最优光滑因子σ值。蚁群算法借鉴了自然界中真实蚁
群的觅食行为特点。首先将所研究的问题抽象为节点模型,将蚂蚁在节点间的逐步选取过程表征为解的解算过程。然后不断向部分解添加负荷定义的解成分,从而构建出一个完整的可行解。最终在信息素的正反馈作用下逐步收敛到所求问题的最优解。
[0066]
蚁群算法收敛到最优解的过程是信息素正反馈的动态实现过程,信息素的调整策略对算法的收敛速度和优化质量有很大的影响。在基本蚁群算法中,路径上的信息素仅根据蚂蚁构建的路径长度进行更新,没有对路径质量进行有效区分。针对上述不足,本实施例提出一种改进的信息素差异化更新策略,来提高蚁群算法的收敛速度。改进后的信息素根据路径的长度和质量进行区分。
[0067]
在所有蚂蚁完成一次完整的路径构建后,找出本次迭代最优路径长度l
best
、最差路径长度l
worst
、平均路径长度l
averge
。对路径长度小于l
averge
的较优路径进行适当的加强。对路径长度大于l
averge
的较差路径进行适当的减弱。信息素差异性变化量的更新如下式所示,其中η取1.2:
[0068][0069]
将grnn测试数据的rmse作为蚁群算法的适应度函数,计算路径值,rmse计算公式如下:
[0070][0071]
其中pk表示预测值,mk表示测量值。
[0072]
将样本和标签数据代入iaco-grnn模型,通过迭代计算,找出每个训练样本对应的最佳sigma值。训练好的iaco-grnn模型用于后续的关节角度预测。
[0073]
在使用一种基于肌电信号的上肢肘关节角度估计方法根据肌电信号估计角度之前,需要训练好iaco-grnn网络。iaco-grnn训练过程如图1所示。
[0074]
根据肌肉收缩的条件,肌肉的生理特性可能会发生改变。肌肉的收缩类型可分为三类:等长收缩、等张收缩和等速收缩(动态收缩)。其中,等长收缩是保持肌肉的长度不便的情况下,其肌肉张力发生了改变。等张收缩是保持肌力不变的情况下,肌肉的长度发生了伸缩。等速收缩是保持速度不变的情况下,肌肉的长度发生了收缩。其中,等速收缩更接近真实情况。本实施例训练数据主要来自于等速收缩情况。分别采集三种速度(低速,中速,快速)运动的肌电信号和角度数据。
[0075]
其中低速为10s完成一次肘关节屈曲-伸展运动;中速为10s完成两次肘关节屈曲-伸展运动;快速为10s完成三次肘关节屈曲-伸展运动。其中使用自制的角度采集模块对肘关节角度数据进行采集。角度采集模块使用两块轻质3d打印件铰接。连接处使用霍尔角度传感器。
[0076]
肌电信号的采集、预处理和特征提取和前述一样。将肌电信号的特征和角度数据共同输入到iaco-grnn模型中。具体而言,输入到公式3中,其中每一个xi包含四个数值,分别是从肱二头肌和肱三头肌提取的两组肌电特征值。通过公式4-6计算出预测结果值。
[0077]
判断是否达到迭代次数,若为达到迭代次数,则进入改进蚁群优化算法中,找寻最优光滑因子
[0078]
其中改进蚁群优化算法在预设的光滑因子范围中通过不断迭代判断,找出最佳的光滑因子。
[0079]
此处光滑因子并不是统一一个。例如,输入1000个训练样本,则对应有1000个光滑因子,这些光滑因子可能相同也可能不同。每一次改进蚁群算法迭代时,将该次的光滑因子带入到grnn中,然后使用测试样本计算该次grnn的rmse适应度函数(公式8)。通过不断的迭代计算,找出适应度函数最小的光滑因子,即为最优光滑因子。
[0080]
采用改进蚁群优化算法找出广义回归神经网络最优光滑因子的步骤:
[0081]
(1)调用grnn网络,并导入训练样本;
[0082]
(2)初始化蚁群优化算法参数,蚂蚁数量100,信息素启发因子2,距离启发因子1,信息素挥发因子0.5,信息素强度2.2,其他参数采用常规默认的数值;按照比例划分训练集和测试集;
[0083]
(3)将蚂蚁置于起点,开始迭代;
[0084]
(4)判断蚂蚁是否到达目标点,若是,则停止搜索,本次迭代结束;否则,转到步骤3直到到达目标点。
[0085]
(5)在所有蚂蚁到达目标点后,结束本次迭代,记下所有蚂蚁的路线长度。此处路线长度为适应度函数(公式8),路线越长对应着适应度函数越大,即预测值和真实值差别越大。因此最优路径即最短路径,意味着预测值和真实值越接近。使用改进的信息素更新方法更新全局路径,然后继续迭代。
[0086]
(6)判断当前迭代次数是否达到最大迭代次数,若是,输出最优光滑因子;否则,转到步骤3,继续迭代,直到达到最大迭代次数。
[0087]
在本实施例中还公开了一种基于肌电信号的上肢肘关节角度估计系统,包括:
[0088]
获取样本数据模块:用于采集肌电信号以及肌电信号对应的肘关节运动角度;
[0089]
数据预处理模块:用于对肌电信号进行预处理,并提取肌电信号的特征;
[0090]
iaco-grnn训练模块:用于将肌电信号的特征以及肘关节运动角度作为样本数据输入到iaco-grnn网络中;
[0091]
iaco-grnn模型建立模块:用于多次迭代,利用改进的蚁群算法找出最优光滑因子,获得iaco-grnn模型;
[0092]
上肢肘关节预测模块:将待检测肌电信号输入到iaco-grnn模型,得到对应的上肢肘关节角度。
[0093]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的装置而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
[0094]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。
对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1