手术机器人及其控制方法、控制装置与流程
本技术涉及医疗器械领域,特别是涉及一种手术机器人及其控制方法、控制装置。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。
2、随着科技的进步,微创手术机器人系统技术逐渐成熟,并被广泛应用。手术机器人系统包括主操控台及从操作设备,从操作设备包括多个具有末端器械的医疗器械,这些医疗器械包括具有图像末端器械的成像器械及具有操作末端器械的手术器械。主操控台包括显示器及操作部。医生在显示器显示的由成像器械提供的视野下,操作操作部以操纵成像器械或手术器械运动。
3、在调节视野时,医生通常期望以成像器械的远端点为中心对调节成像器械旋转以获得期望的图像,然而,实际由于微创手术机器人系统的结构特性和运动特性,通常不能直接控制成像器械围绕其远端点旋转,而是需要围绕其它旋转中心例如腹腔手术时特定的远心不动点旋转。由于成像器械运动时的旋转中心发生改变,容易导致成像器械实际获得的图像并不是医生所期望的。
技术实现思路
1、基于此,有必要提供一种能够获得期望的图像的手术机器人及其控制方法、控制装置。
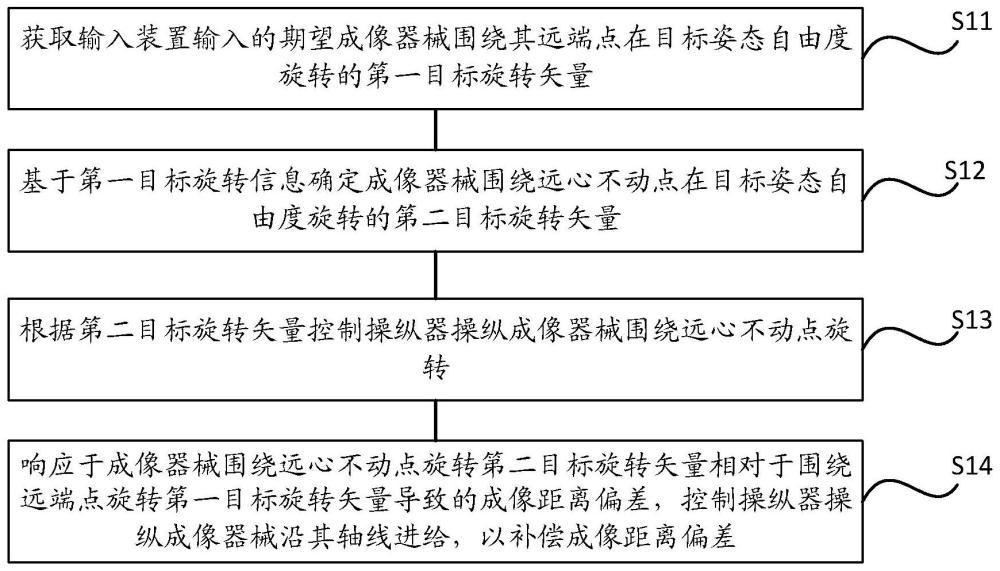
2、一方面,本技术提供一种手术机器人,包括:成像器械,用于插入身体开口内以采集图像;操纵器,用于操纵所述成像器械围绕定位于所述身体开口的远心不动点旋转、和沿所述成像器械的轴线方向进给;输入装置,用于输入所述成像器械围绕其远端点在目标姿态自由度旋转的第一目标旋转矢量;控制装置,与所述操纵器和所述输入装置耦接,被配置成用于:获取所述输入装置输入的所述第一目标旋转矢量;基于所述第一目标旋转信息确定所述成像器械围绕所述远心不动点在目标姿态自由度旋转的第二目标旋转矢量;根据所述第二目标旋转矢量控制所述操纵器操纵所述成像器械围绕所述远心不动点旋转;获取所述成像器械围绕所述远心不动点旋转所述第二目标旋转矢量相对于围绕所述远端点旋转所述第一目标旋转矢量的成像距离偏差;基于所述成像距离偏差,控制所述操纵器操纵所述成像器械沿所述成像器械的轴线进给,以补偿所述成像距离偏差。
3、其中,所述基于所述第一目标旋转矢量确定所述成像器械围绕所述远心不动点在目标姿态自由度旋转的第二目标旋转矢量,包括:获取第一距离和第二距离,所述第一距离包括所述成像器械介于所述远心不动点与所述远端点之间的距离,所述第二距离包括所述成像器械的目标成像距离;结合所述第一目标旋转矢量、所述第一距离及所述第二距离,确定所述成像器械围绕所述远心不动点在目标姿态自由度旋转的第二目标旋转矢量。
4、其中,所述控制所述操纵器操纵所述成像器械沿所述成像器械的轴线进给,以补偿所述成像距离偏差,包括:获取所述成像器械的初始位置和/或姿态,所述初始位置和/或姿态包括所述输入装置与所述成像器械建立主从映射关系时刻的位置和/或姿态;获取所述成像器械的当前位置和/或姿态;基于所述成像器械的目标位置和/或姿态相较于其当前位置和/或姿态与所述初始位置和/或姿态之间的位置和/或姿态关系,确定所述成像器械沿其轴线进给的目标方向,所述目标位置和/或姿态基于所述第二目标旋转矢量确定;控制所述成像器械沿其轴线在所述目标方向进给,以补偿所述成像距离偏差。
5、其中,所述基于所述成像器械的目标位置和/或姿态与所述初始位置和/或姿态之间的位置和/或姿态关系,确定所述成像器械沿其轴线进给的目标方向,包括:在所述目标位置和/或姿态远离所述初始位置和/或姿态时,确定所述目标方向为所述成像器械沿其轴线撤回身体开口的方向;或,在所述目标位置和/或姿态靠近所述初始位置和/或姿态时,确定所述目标方向为所述成像器械沿其轴线插入身体开口的方向。
6、其中,所述成像距离偏差包括所述成像器械围绕所述远端点旋转所述第一目标旋转矢量对准的目标成像中心、与所述成像器械围绕所述远心不动点旋转所述第二目标旋转矢量对准的实际成像中心之间的距离差值。
7、其中,所述控制装置还被配置成用于:获取第一距离和第二距离,所述第一距离包括所述成像器械介于所述远心不动点与所述远端点之间的距离,所述第二距离包括所述成像器械的目标成像距离;结合所述第一目标旋转矢量、所述第一距离及所述第二距离,确定所述成像距离偏差。
8、其中,所述获取第一距离,包括:获取所述操纵器和所述成像器械中关节的关节变量;结合所述关节变量和正运动学,确定所述远端点在参考坐标系的第一位置,并确定所述远心不动点在参考系坐标系的第二位置;基于所述第一位置和所述第二位置确定所述第一距离。
9、其中,所述获取第二距离,包括:获取所述成像器械的成像距离范围;基于所述成像距离范围生成包括一个或多个可选目标成像距离的配置界面;响应于通过所述配置界面对目标成像距离的选择,将选择的所述目标成像距离作为所述第二距离。
10、其中,所述目标姿态自由度包括俯仰自由度和偏航自由度中的至少一种。
11、其中,所述输入装置包括感应组件,所述感应组件包括一个或多个第一传感器,所述控制装置基于所述一个或多个第一传感器感应到的用户头部在目标姿态自由度的旋转确定所述第一目标旋转矢量。
12、其中,所述输入装置包括感应组件,所述感应组件包括一个或多个提供感应场的第二传感器和可佩戴于用户头部的穿戴式设备,所述穿戴式设备配置有一个或多个信标,所述控制装置基于所述一个或多个第二传感器感应到的所述一个或多个信标在所述感应场的信号强度的变化确定所述第一目标旋转矢量。
13、其中,所述输入装置包括感应组件,所述感应组件包括一个或多个第三传感器,所述控制装置基于所述一个或多个第三传感器感应到的用户头部在进给方向的移动确定所述成像器械在进给方向的目标移动信息,所述控制装置还被配置成用于:获取所述感应组件输入的期望所述成像器械沿其轴线方向进给的目标移动信息;根据所述目标移动信息控制所述操纵器操纵所述成像器械沿其轴线进给。
14、其中,所述手术机器人还包括:图像主机,包括观察组件和姿态调整组件,所述姿态调整组件用于调整所述观察组件的姿态,所述观察组件用于观察所述成像器械采集的图像;所述控制装置与所述姿态调整组件耦接,还被配置成用于:根据所述第一目标旋转矢量控制所述姿态调整组件运动,使得所述观察组件跟随所述用户头部的运动在目标姿态自由度运动。
15、其中,所述姿态调整组件包括:底座;第一枢转件,与所述底座枢转连接,被配置成可相对于所述底座在第一姿态自由度旋转;及第二枢转件,与所述第一枢转件枢转连接,被配置成可相对于所述第一枢转件枢转在第二姿态自由度旋转;所述观察组件与所述第二枢转件相对固定连接。
16、其中,所述底座包括第一弯曲滑轨,所述第一枢转件包括第二弯曲滑轨和第三弯曲滑轨,所述第二枢转件包括第四弯曲滑轨,所述第一弯曲滑轨和所述第二弯曲滑轨滑动配合以可在第一姿态自由度旋转,所述第三弯曲滑轨和所述第四弯曲滑轨滑动配合以可在第二姿态自由度旋转。
17、其中,所述底座包括第一弯曲滑轨,所述第一枢转件包括第二弯曲滑轨,所述第一弯曲滑轨和所述第二弯曲滑轨滑动配合以可在第一姿态自由度旋转,所述姿态调整关节还包括转动关节,所述第二枢转件与所述第一枢转件之间通过所述转动关节连接以可在第二姿态自由度旋转。
18、其中,所述第一姿态自由度和所述第二姿态自由度中的一个包括偏航自由度、另一个包括俯仰自由度;所述偏航自由度与用户头部的左右旋转关联,所述偏航自由度的运动范围被配置成介于-60°~+60°之间;所述俯仰自由度与用户头部的上下旋转关联,所述俯仰自由度的运动范围被配置成介于-45°~+45°之间。
19、其中,所述成像器械包括刚性零度内窥镜。
20、另一方面,本技术提供一种手术机器人的控制方法,所述手术机器人包括:成像器械,用于插入身体开口内以采集图像;操纵器,用于操纵所述成像器械围绕定位于所述身体开口的远心不动点旋转、和沿所述成像器械的轴线方向进给;输入装置,用于输入所述成像器械围绕远端点在目标姿态自由度旋转的第一目标旋转矢量;所述控制方法包括:获取所述输入装置输入的所述第一目标旋转矢量;基于所述第一目标旋转矢量确定所述成像器械围绕所述远心不动点在目标姿态自由度旋转的第二目标旋转矢量;根据所述第二目标旋转矢量控制所述操纵器操纵所述成像器械围绕所述远心不动点旋转;获取所述成像器械围绕所述远心不动点旋转所述第二目标旋转矢量相对于围绕所述远端点旋转所述第一目标旋转矢量的成像距离偏差;基于所述成像距离偏差,控制所述操纵器操纵所述成像器械沿所述成像器械的轴线进给,以补偿所述成像距离偏差。
21、另一方面,本技术提供了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被配置为由处理器加载并执行实现如上述任一项实施例所述的控制方法的步骤。
22、另一方面,本技术提供了一种手术机器人的控制装置,包括:存储器,用于存储计算机程序;及处理器,用于加载并执行所述计算机程序;其中,所述计算机程序被配置为由所述处理器加载并执行实现如上述任一项实施例所述的控制方法的步骤。
23、本技术的手术机器人及其控制方法、控制装置,具有如下有益效果:
24、通过在控制操纵器操纵成像器械围绕远心不动点旋转第二目标旋转矢量的同时,操纵成像器械沿其轴线进给适当距离,能够实现与操纵成像器械围绕其远端点旋转第一目标旋转矢量时一样的成像效果,即能够确保成像器械实际采集的图像与期望采集的图像一致。
- 还没有人留言评论。精彩留言会获得点赞!