一种智能盲人出行导航头盔
1.本发明涉及盲人导航技术领域,具体涉及一种智能盲人出行导航头盔。
背景技术:
2.盲人进行看路走路主要有以下几种方法:1、经验判断,对某一地形十分熟悉后可以根据之前行走过的经验进行判断是否有障碍物;2、借助其他工具,如手杖、盲道和导盲犬等,借助其他工具的反馈信息判断当前的路况;3、听声音进行分辨,部分盲人在失去视力后其他感官会有一定程度的强化,比如听力更加敏感等,因此可以通过听取周围环境的声音判断当前的路况。
3.虽然盲人由以上方法便于出行,但是盲人在无人陪伴的情况下出行依旧困难,难免会出现迷路和走失的情况。目前,盲人出行主要还是依靠盲道、手杖和导盲犬,虽然这给盲人出行带来了一定的便利,但是盲道、手杖和导盲犬只能给盲人判断出前方是否有障碍物,遇到障碍物时,能够及时绕过障碍物,当盲人行走距离较远或者遇到多次转弯后,容易导致分不清方向,无法正确判断出东南西北,行走的路线出现偏差,造成走失和出行不便的问题。
技术实现要素:
4.本发明的目的是为了克服现有技术中的问题,提供一种智能盲人出行导航头盔。
5.本发明提供了一种智能盲人出行导航头盔,包括:转动单元和按压结构,转动单元包括方向传感器、转动电机、转盘和振动电机,所述方向传感器和转动电机均固定在盔体内,且方向传感器位于转动电机的下方,转动电机的输出轴伸出盔体的外表面,转动电机的输出轴固定连接转盘,转盘上固定设有振动电机;按压结构包括第一柱体和第一弹簧,所述转盘的下表面设有多个绕转动电机设置的盲孔,盲孔的底壁连接第一弹簧的一端,第一弹簧的另一端连接第一柱体的一端,第一柱体的另一端为圆弧面,并且能够抵接设置在盔体上的用于将振动转递给盲人头顶的多个按压单元。
6.较佳地,所述多个按压单元绕转动电机均匀分部在盔体上,各按压单元均包括第二柱体、第二弹簧和第三柱体,盔体上设有多个通孔,各通孔的侧壁均设有环形槽,环形槽的下端面连接第二弹簧的一端,第二弹簧的另一端连接第二柱体的下端面,第二柱体在环形槽内滑动,第二柱体的下端面还固定连接第三柱体,第三柱体滑动连接所述通孔。
7.较佳地,以转动电机为中心,向外辐射的直线上设有多个按压结构和多个按压单元。
8.较佳地,所述第二弹簧套设在第三柱体上,用于将第二柱体向靠近第一柱体的方向推动。
9.较佳地,所述盔体的外表面与通孔之间设有圆弧角。
10.较佳地,以转动电机为中心,位于同一半径位置的通孔所在路径上设有用于第一柱体滑动的滑槽。
11.较佳地,所述滑槽上设有多个限位凹槽,且限位凹槽与所述通孔间隔设置。
12.较佳地,所述第二弹簧推动第二柱体抵接环形槽的上端面,第三柱体的下端伸出盔体的内表面。
13.与现有技术相比,本发明的有益效果是:盲人出行时,将本智能盲人出行导航头盔戴在头上,方向传感器实时监测盲人的面部朝向,当盲人转身后,方向传感器检测到方向转动,将转动的角度发送给控制器,控制器控制转动电机带动转盘反向旋转相同的角度,使得转盘上的按压结构始终朝向固定的方向(东南西北中的任意一个方向),每次转动后,按压结构均能够通过按压单元将振动传递给盲人,盲人通过头顶不同方位的振动,能够清楚判断出设定的固定的方向,因此,无论盲人如何转动盲人都能够以自己为中心,以按压结构所处的方向判断出面部的朝向,避免了盲人行走距离较远或者遇到多次转弯后,分不清方向,无法正确判断出东南西北,行走的路线出现偏差,造成走失和出行不便的问题。
附图说明
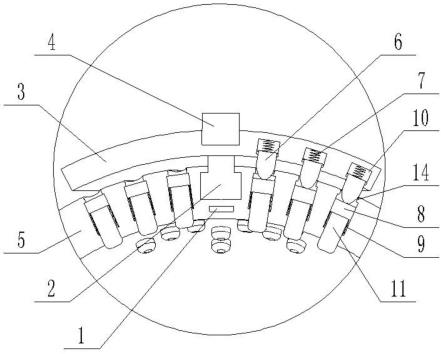
14.图1为本发明的剖视图;
15.图2为本发明的图1的局部放大图;
16.图3为本发明的盔体俯视图;
17.图4为本发明的立体图。
18.附图标记说明:
19.1.方向传感器,2.转动电机,3.转盘,4.振动电机,5.盔体,6.第一柱体,7.第一弹簧,8.第二柱体,9.第二弹簧,10.盲孔,11.第三柱体,12.限位凹槽,13.滑槽,14.通孔。
具体实施方式
20.下面对本发明的具体实施方式进行详细描述,但应当理解本发明的保护范围并不受具体实施方式的限制。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.本发明提供的一种智能盲人出行导航头盔,如图1-4包括:转动单元和按压结构,转动单元包括方向传感器1、转动电机2、转盘3和振动电机4,所述方向传感器1和转动电机2均固定在盔体5内,且方向传感器1位于转动电机2的下方,转动电机2的输出轴伸出盔体5的外表面,转动电机2的输出轴固定连接转盘3,转盘3上固定设有振动电机4;按压结构包括第一柱体6和第一弹簧7,所述转盘3的下表面设有多个绕转动电机2设置的盲孔10,盲孔10的底壁连接第一弹簧7的一端,第一弹簧7的另一端连接第一柱体6的一端,第一柱体6的另一端为圆弧面,并且能够抵接设置在盔体5上的用于将振动转递给盲人头顶的多个按压单元。
22.盲人出行时,将本智能盲人出行导航头盔戴在头上,方向传感器1实时监测盲人的面部朝向,当盲人转身后,方向传感器1检测到方向转动,将转动的角度发送给控制器,控制器控制转动电机2带动转盘3反向旋转相同的角度,使得转盘3上的按压结构始终朝向固定的方向(东南西北中的任意一个方向),每次转动后,按压结构均能够通过按压单元将振动传递给盲人,盲人通过头顶不同方位的振动,能够清楚判断出设定的固定的方向,因此,无论盲人如何转动盲人都能够以自己为中心,以按压结构所处的方向判断出面部的朝向,避免了盲人行走距离较远或者遇到多次转弯后,分不清方向,无法正确判断出东南西北,行走
的路线出现偏差,造成走失和出行不便的问题。
23.优选地,如图2所述多个按压单元绕转动电机2均匀分部在盔体5上,各按压单元均包括第二柱体8、第二弹簧9和第三柱体11,盔体5上设有多个通孔14,各通孔14的侧壁均设有环形槽,环形槽的下端面连接第二弹簧9的一端,第二弹簧9的另一端连接第二柱体8的下端面,第二柱体8在环形槽内滑动,第二柱体8的下端面还固定连接第三柱体11,第三柱体11滑动连接所述通孔14。
24.转盘3上的按压结构转动后,第一柱体6正好按压在第二柱体8上,第二弹簧9受力压缩,同时第三柱体11的下端面接触盲人头部,给头部传导更加清晰的振动。
25.优选地,如图2-3以转动电机2为中心,向外辐射的直线上设有多个按压结构和多个按压单元。
26.目的在于将传导在头上的一个点的振动转换成多个点的振动,同时多个点的振动处于同一射线上,增加盲人的感知力,防止出现偏差。
27.优选地,所述第二弹簧9套设在第三柱体11上,用于将第二柱体8向靠近第一柱体6的方向推动。
28.优选地,所述盔体5的外表面与通孔14之间设有圆弧角。
29.目的在于使得第一柱体6的下端面进出通孔14时更加顺畅,减少阻力。
30.优选地,如图3以转动电机2为中心,位于同一半径位置的通孔14所在路径上设有用于第一柱体6滑动的滑槽13。
31.优选地,如图2-4所述滑槽13上设有多个限位凹槽12,且限位凹槽12与所述通孔14间隔设置;所述第二弹簧9推动第二柱体8抵接环形槽的上端面,第三柱体11的下端伸出盔体5的内表面。
32.当盲人不行走时,控制器控制转动电机2转动特定的角度,使得第一柱体6的下端落在限位凹槽12上,振动电机4将震动传导给盔体5,盔体5再将震动传递给多个第三柱体11,用于按摩盲人的头部。
33.本发明的智能盲人出行导航头盔的使用方法如下:
34.盲人出行时使用出行模式,将本智能盲人出行导航头盔戴在头上,方向传感器1实时监测盲人的面部朝向,当盲人转身后,方向传感器1检测到方向转动,将转动的角度发送给控制器,控制器控制转动电机2带动转盘3反向旋转相同的角度,使得转盘3上的按压结构始终朝向固定的方向(东南西北中的任意一个方向),每次转动后,按压结构均能够通过按压单元将振动传递给盲人,盲人通过感知头顶不同方位的振动,能够清楚判断出设定的固定的方向,因此,无论盲人如何转动盲人都能够以自己为中心,以按压结构所处的方向判断出面部的朝向,避免了盲人行走距离较远或者遇到多次转弯后,分不清方向,无法正确判断出东南西北,行走的路线出现偏差,造成走失和出行不便的问题;
35.盲人休息时使用按摩模式,将本智能盲人出行导航头盔戴在头上,控制器控制转动电机2转动特定的角度,使得第一柱体6的下端落在限位凹槽12上,振动电机4将震动传导给盔体5,盔体5再将震动传递给多个第三柱体11,用于按摩盲人的头部。
36.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1