人机相容且避奇异的七自由度上肢外骨骼康复机器人
1.本发明属于医疗康复器械领域,具体是一种人机相容且避奇异的七自由度上肢外骨骼康复机器人。
背景技术:
2.上肢偏瘫患者的术后康复训练能逐渐恢复患者的上肢运动能力。传统的治疗方式为康复医师一对一辅助患者康复训练,劳动强度高、训练效率低、康复成本高、不利于记录与反馈训练情况以便于及时调整治疗方案。
3.康复机器人能辅助或替代康复医师完成对患者的康复训练,工作效率高,康复效果好。目前,上肢康复机器人主要分为末端引导式与外骨骼式。末端引导式能实现上肢多关节的康复训练,结构简单,但无法实现单关节康复训练以及多关节沿特定轨迹训练。外骨骼式为穿戴式结构,基于上肢解剖学配置各关节自由度,机器人关节轴线与上肢关节轴线重合,能实现单关节以及多关节康复训练,是目前研究的热点,但是其结构设计复杂,控制系统设计有一定难度。
4.申请号为202020892847.6的专利公开了一种八自由度上肢康复训练臂及装置,其具有八个主动自由度,其中肩关节设置了5个主动自由度。引进一个被动关节使人机肩关节环链为恰约束系统,能够补偿盂肱关节瞬心在空间中的位移,但整个人机闭链系统为过约束系统,肩部控制系统复杂且没考虑肩关节运动的奇异位形。
5.目前上肢外骨骼康复机器人存在的缺点:1)上肢康复运动中,机器人与上肢关节轴线不重合,导致人-机连接处力或力矩过大,容易对患者造成二次伤害。2)大多数机器人构型设计中并未考虑上肢肩胛带的运动,考虑上肢肩胛带运动的构型中肩关节驱动关节数量多,控制复杂。3)肩部构型没有考虑奇异位形或考虑奇异位形的构型肩关节运动空间小,构型设计不合理,机构处于奇异位形时会导致机构的自由度缺失或者关节速度过大对患者造成损伤。
技术实现要素:
6.针对现有技术的不足,本发明拟解决的技术问题是,提供一种人机相容且避奇异的七自由度上肢外骨骼康复机器人。
7.本发明解决所述技术问题的技术方案是,提供一种人机相容且避奇异的七自由度上肢外骨骼康复机器人,其特征在于,该机器人包括肩部高度调节装置、肩胛带前伸后缩装置、肩关节装置、上臂长度调节装置、肘关节装置、前臂长度调节装置、腕关节装置、肩胛带抬升降低装置、肘关节轴线运动补偿装置和机架;
8.所述肩部高度调节装置包括电动推杆、肩部直线导轨机构、肩部高度调节架和肩胛带连接直线导轨机构;
9.肩部高度调节架通过肩部直线导轨机构滑动安装于机架上,电动推杆为肩部高度调节架滑动的动力;
机系统设计为一个恰约束系统,机器人与患者上肢形成两个恰约束环链即人-机肩关节恰约束环链、人-机肘前臂腕关节恰约束环链,能够补偿在上肢穿戴和运动中人-机关节轴线偏差即肩关节转心、肘关节轴线和腕关节轴线的位移,降低了人-机连接处的力与力矩,保证人机运动相容,避免对患者造成伤害,能够实现肩胛带、肩关节、肘关节、前臂、腕关节的单关节与多关节全方位康复训练,支持主动、被动、阻抗三种康复训练模式,同时保证患者康复训练中的安全性。
24.(2)针对肩关节运动中的奇异位形,本发明通过偏置肩关节内收外展轴线在空间中的方位(即偏置肩内收外展电机的旋转轴线在空间中的角度),在保证肩关节屈伸角度以及整个构型的可操作度最大的情况下,将肩关节等效为球窝关节构型中的奇异点移动到肩关节工作空间边缘,从结构设计上保证了在肩关节运动空间中不存在奇异点,避免当机构处于奇异位形造成机构自由度缺失或关节运动不可控时对患者上肢体造成损伤,同时降低了肩关节控制系统的复杂程度。
25.(3)本发明具有七个主动自由度,能够实现上肢各关节训练。本发明通过将前臂内旋外旋运动后置到肘关节处,利用腕关节关节为椭圆关节特性,设置两个主动自由度既能实现腕关节的屈伸、内收外展与前臂的内旋外旋运动。考虑上肢运动中肩胛带的运动,设置了肩胛带转动关节,上肢的工作空间较以前设计更大,符合人机工程学。
26.(4)本发明设计中考虑了通用性与轻量化设计,肩胛带长度、上臂长度、前臂长度可调,适用不同体态患者使用。被动关节处设置压簧,保证运动过程的平稳性。采用铝合金与树脂材料用于不同部件,构件采用箱体截面,有效减轻整体重量。
附图说明
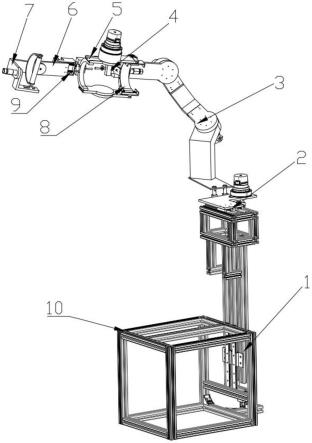
27.图1为本发明的整体结构立体图;
28.图2为本发明的肩部高度调节装置的安装图;
29.图3为本发明的肩胛带前伸后缩装置的立体结构图;
30.图4为本发明的肩关节装置和上臂长度调节装置的安装图;
31.图5为本发明的肩关节装置和上臂长度调节装置的另一视角的安装图;
32.图6为本发明的肩胛带抬升降低装置的安装图;
33.图7为本发明的肘关节装置和前臂长度调节装置的安装图;
34.图8为本发明的肘关节轴线运动补偿装置的安装图;
35.图9为本发明的腕关节装置的安装图。
36.图中,肩部高度调节装置1、肩胛带前伸后缩装置2、肩关节装置3、上臂长度调节装置4、肘关节装置5、前臂长度调节装置6、腕关节装置7、肩胛带抬升降低装置8、肘关节轴线运动补偿装置9、机架10;
37.11、电动推杆;12、肩部直线导轨机构;13、高度调节连接板;14、肩部高度调节架;15、肩胛带连接直线导轨机构;
38.21、肩胛带连接板;22、肩前伸后缩电机;23、长度可调的锁骨连杆;24、肩关节连接板;
39.31、肩内收外展电机支架;32、肩内收外展电机;33、肩内收外展转动机架;34、肩关节连杆;35、肩屈伸电机支架;36、肩屈伸电机;37、肩屈伸转动支架;38、肩内旋外旋电机;
39、肩内旋外旋齿圈;310、肩内旋外旋齿轮;311、圆弧导轨机构;
40.41、导向光轴一;42、t型丝杠一;43、转动手轮一;44、肩内旋外旋支撑架;45、丝杠光轴支撑座一;46、丝杠光轴支撑架一;
41.51、上臂下支架;52、肘关节电机;53、前臂转动支架;
42.61、转动手轮二;62、丝杠光轴支撑架二;63、丝杠光轴支撑座二;64、前臂长度调节支撑架;65导向光轴二;66、t型丝杠二;
43.71、前臂下支架;72、腕屈伸电机;73、腕屈伸转动支架;74、前臂内旋外旋电机;75、腕转动支架;76、腕部直线导轨机构;77、末端手柄;
44.81、人机接触半环;82、压簧一;83、导杆一;
45.91、导杆二;92、压簧二;93、前臂连接板;94、直线轴承。
具体实施方式
46.下面给出本发明的具体实施例。具体实施例仅用于进一步详细说明本发明,不限制本发明权利要求的保护范围。
47.本发明提供了一种人机相容且避奇异的七自由度上肢外骨骼康复机器人(简称机器人),其特征在于,该机器人包括肩部高度调节装置1、肩胛带前伸后缩装置2、肩关节装置3、上臂长度调节装置4、肘关节装置5、前臂长度调节装置6、腕关节装置7、肩胛带抬升降低装置8、肘关节轴线运动补偿装置9和机架10;
48.所述肩部高度调节装置1包括电动推杆11、肩部直线导轨机构12、高度调节连接板13、肩部高度调节架14和肩胛带连接直线导轨机构15;
49.肩部高度调节架14通过电动推杆11安装于机架10上(具体是:电动推杆11的壳体固定在机架10上,伸缩端与肩部高度调节架14固定连接);肩部高度调节架14通过肩部直线导轨机构12滑动安装于机架10上(具体是:肩部直线导轨机构12的导轨固定在机架10上,肩部直线导轨机构12的滑块通过高度调节连接板13与肩部高度调节架14固定连接);电动推杆11伸缩,推动肩部高度调节架14在肩部直线导轨机构12上滑动,调节坐姿下的肩部高度,适应不同肩部高度的患者;
50.所述肩胛带前伸后缩装置2实现上肢运动中盂肱关节前伸后缩运动,包括肩胛带连接板21、肩前伸后缩电机22、长度可调的锁骨连杆23和肩关节连接板24;
51.肩胛带连接板21通过肩胛带连接直线导轨机构15滑动安装于肩部高度调节架14上(具体是:肩胛带连接直线导轨机构15的导轨固定在肩部高度调节架14的顶部,肩胛带连接板21固定在肩胛带连接直线导轨机构15的滑块上),被动补偿上肢运动中盂肱关节转心在人体冠状轴方向的位移;两个长度可调的锁骨连杆23相互平行设置构成平行四边形机构,其一端均转动安装于肩胛带连接板21上,另一端均与肩关节连接板24转动连接;一个长度可调的锁骨连杆23通过肩前伸后缩电机22与肩胛带连接板21转动连接(具体是:肩前伸后缩电机22的壳体固定于肩胛带连接板21上,输出端与一个长度可调的锁骨连杆23的一端固定连接);长度可调的锁骨连杆23能适应不同身高体型患者需求,满足不同身高、体态患者的盂肱关节漂移中心距;
52.所述肩关节装置3包括肩内收外展电机支架31、肩内收外展电机32、肩内收外展转动支架33、肩关节连杆34、肩屈伸电机支架35、肩屈伸电机36、肩屈伸转动支架37、肩内旋外
旋电机38、肩内旋外旋齿圈39、肩内旋外旋齿轮310和圆弧导轨机构311;上臂长度调节装置4能够通过直线伸缩实现长度调节,分成固定端和移动端;
53.肩内收外展电机支架31固定于肩关节连接板24上;肩内收外展转动支架33通过肩内收外展电机32与肩内收外展电机支架31转动连接(具体是:肩内收外展电机32的壳体固定于肩内收外展电机支架31上,其输出端与肩内收外展转动支架33固定连接);肩关节连杆34的两端分别与肩内收外展转动支架33和肩屈伸电机支架35固定连接;肩屈伸转动支架37通过肩屈伸电机36与肩屈伸电机支架35转动连接(具体是:肩屈伸电机36的壳体固定于肩屈伸电机支架35上,其输出端与肩屈伸转动支架37固定连接);上臂长度调节装置4的固定端或移动端中的一个固定于肩屈伸转动支架37上;肩内旋外旋齿圈39通过圆弧导轨机构311滑动安装于上臂长度调节装置4的固定端或移动端中的另一个上(具体是:圆弧导轨机构311的导轨固定于肩内旋外旋齿圈39的内侧,圆弧导轨机构311的滑块与上臂长度调节装置4的固定端或移动端中的另一个固定连接);肩内旋外旋电机38的壳体固定于上臂长度调节装置4的固定端或移动端中的另一个上,输出端固定安装有肩内旋外旋齿轮310;肩内旋外旋齿轮310与肩内旋外旋齿圈39啮合传动连接;肩内收外展电机32的旋转轴线、肩屈伸电机36的旋转轴线、肩内旋外旋电机38的旋转轴线相交于一点,构成等效球窝关节,上臂下支架51的末端形成球面运动;肩内旋外旋电机38驱动肩内旋外旋齿轮310旋转,带动肩内旋外旋齿圈39旋转,实现肩关节的内旋外旋运动;
54.所述肩胛带抬升降低装置8包括人机接触半环81、压簧一82和导杆一83;
55.导杆一83的两端固定于肩内旋外旋齿圈39的u形板中;人机接触半环81的端部滑动安装于导杆一83中;压簧一82嵌套于导杆一83上,一端与人机接触半环81接触或固定连接,另一端与肩内旋外旋齿圈39的u形板接触或固定连接;人机接触半环81上设置有绑带,用于与人体上臂连接。压簧一82提高移动中的平稳性。肩胛带抬升降低运动为被动运动,被动补偿上肢运动中肩胛带的抬升降低运动;
56.所述肘关节装置5包括上臂下支架51、肘关节电机52和前臂转动支架53;前臂长度调节装置6能够通过直线伸缩实现长度调节,分成固定端和移动端;
57.上臂下支架51固定在肩内旋外旋齿圈39上;前臂转动支架53通过肘关节电机52与上臂下支架51转动连接(具体是:肘关节电机52的壳体固定于上臂下支架51上,其输出端与前臂转动支架53固定连接);前臂长度调节装置6的固定端或移动端中的一个固定于前臂转动支架53上;
58.所述肘关节轴线运动补偿装置9包括导杆二91、压簧二92、前臂连接板93和直线轴承94;
59.导杆二91的两端固定于前臂长度调节装置6的固定端或移动端中的另一个内;前臂连接板93通过直线轴承94滑动安装于导杆二91上(具体是:直线轴承94采用法兰型直线轴承,法兰型直线轴承的内圈与导杆二91配合,外圈的法兰与前臂连接板93固定连接);压簧二92嵌套于导杆二91上,一端与前臂长度调节装置6的固定端或移动端中的另一个接触或固定连接,另一端与直线轴承94接触或固定连接。压簧二92提高移动中的平稳性。肘关节轴线运动补偿运动为被动运动,被动补偿运动中肘关节轴线的偏差;
60.所述腕关节装置7包括前臂下支架71、腕屈伸电机72、腕屈伸转动支架73、前臂内旋外旋电机74、腕转动支架75、腕部直线导轨机构76和末端手柄77;
61.前臂下支架71固定于前臂连接板93上;腕屈伸转动支架73通过腕屈伸电机72转动安装于前臂下支架71上(具体是:腕屈伸电机72的壳体固定于前臂下支架71上,其输出端与腕屈伸转动支架73固定连接);腕转动支架75通过前臂内旋外旋电机74转动安装于腕屈伸转动支架73上(具体是:前臂内旋外旋电机74的壳体固定于腕屈伸转动支架73上,其输出端与腕转动支架75固定连接);末端手柄77通过腕部直线导轨机构76滑动安装于腕转动支架75上(具体是:腕部直线导轨机构76的导轨固定在腕转动支架75上,末端手柄77固定在腕部直线导轨机构76的滑块上);末端手柄77上安装有绑带,用于与人体手部连接。末端手柄77在腕转动支架75上滑动,补偿运动中腕关节轴线偏差。
62.优选地,肩屈伸电机36的旋转轴线和肩内旋外旋电机38的旋转轴线相互垂直,肩内收外展电机32的旋转轴线和肩屈伸电机36的旋转轴线的夹角为锐角。偏置肩内收外展电机32的旋转轴线,与肩屈伸电机36的旋转轴线形成锐角,改变肩关节装置3的奇异点,避免奇异位形。
63.优选地,肩内收外展电机支架31在水平面内倾斜一个角度,同时与竖直面存在一个夹角,使得肩内收外展电机32的旋转轴线与水平面的夹角为50
°
、与竖直面的夹角为40
°
。设计肩内收外展电机32的旋转轴线在空间中的方位角(即与水平面和竖直面的夹角)可以保证在肩关节屈伸角度以及整个构型的可操作度最大的情况下,将肩关节奇异点移动到工作空间边缘,避免了在康复训练过程中当机构达到奇异位形造成机构自由度缺失或者关节运动不可控而危害患者安全。
64.优选地,所述上臂长度调节装置4包括导向光轴一41、t型丝杠一42、转动手轮一43、肩内旋外旋支撑架44、丝杠光轴支撑座一45和丝杠光轴支撑架一46;
65.丝杠光轴支撑架一46为固定端,肩内旋外旋支撑架44为移动端;丝杠光轴支撑架一46或肩内旋外旋支撑架44中的一个固定在肩屈伸转动支架37上;丝杠光轴支撑座一45固定在丝杠光轴支撑架一46上;t型丝杠一42的一端转动安装于丝杠光轴支撑座一45中,穿过丝杠光轴支撑架一46,另一端固定有转动手轮一43;肩内旋外旋支撑架44螺纹连接于t型丝杠一42上,形成丝杠螺母连接;导向光轴一41的端部固定于丝杠光轴支撑架一46中,肩内旋外旋支撑架44滑动安装于导向光轴一41上,导向光轴一41对肩内旋外旋支撑架44起导向作用。转动手轮一43旋转,带动肩内旋外旋支撑架44沿导向光轴一41移动,实现上臂尺寸调节。
66.优选地,所述前臂长度调节装置6包括转动手轮二61、丝杠光轴支撑架二62、丝杠光轴支撑座二63、前臂长度调节支撑架64、导向光轴二65和t型丝杠二66;
67.丝杠光轴支撑架二62为固定端,前臂长度调节支撑架64为移动端;丝杠光轴支撑架二62或前臂长度调节支撑架64中的一个固定在前臂转动支架53上;丝杠光轴支撑座二63固定在丝杠光轴支撑架二62或前臂转动支架53上;t型丝杠二66的一端通过轴承转动安装于丝杠光轴支撑座二63中,穿过丝杠光轴支撑架二62,另一端固定有转动手轮二61;前臂长度调节支撑架64螺纹连接于t型丝杠二66上,形成丝杠螺母连接;导向光轴二65的端部固定于丝杠光轴支撑架二62中,前臂长度调节支撑架64滑动安装于导向光轴二65上,导向光轴二65对前臂长度调节支撑架64起导向作用。转动手轮二61旋转,带动前臂长度调节支撑架64沿导向光轴二65移动,实现前臂尺寸调节。
68.本发明的工作原理和工作流程是:
69.康复训练前,患者坐在机架10的座板上,通过长度可调的锁骨连杆23调整锁骨长度,转动手轮一43带动t型丝杠一42旋转来调节上臂长度,转动手轮二61带动t型丝杠二66旋转来调节前臂长度,人体上臂通过绑带固定于人机接触半环81上,人体手部通过绑带固定于末端手柄77上,带动上肢运动。
70.人-机捆绑完成后,安装在各关节的驱动电机带动各转动支架运动,通过人-机连接处的绑带带动上肢各关节按照预定轨迹运动,添加到各环链的被动关节补偿上肢运动过程中人-机关节轴线偏差,实现患者上肢的康复训练。当实现上肢的向前屈肘且腕部屈曲动作时,肩前伸后缩电机22带动长度可调的锁骨连杆23运动使得盂肱关节转心前移,肩屈伸电机36驱动肩屈伸转动支架37运动实现上臂的前屈,肘关节电机52驱动前臂转动支架53实现前臂的屈曲运动,腕屈伸电机72驱动腕屈伸转动支架73带动与末端手柄77通过绑带固连的患者手部实现腕部屈曲运动,进而实现整个上臂向前屈肘且腕部屈曲动作;在机器人辅助患者康复运动中,上肢通过肩胛带抬升降低装置8、肘关节轴线运动补偿装置9以及腕部直线导轨机构76运动,被动补偿上肢体肩关节、肘关节、腕关节处关节轴线运动位移,降低人-机连接处力矩。其他康复动作同此,不再描述。
71.在上肢康复训练过程中,为了防止意外断电造成关节转动支架在重力作用下继续反转运动,驱动关节的电机采用无刷直流电机(伺服电机),与谐波减速器之间添加抱闸制动器,确保在断电时患者保持当前姿态,保持关节位置,防止对患肢肢体造成二次伤害;同时,在各关节转动面处设置有机械限位装置,确保关节运动角度在允许的安全范围内,不会超过患者各关节的允许角度。保证患者康复训练中的安全性。
72.本发明未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1