环形阵列换能器及前向性心脏腔内超声鞘管的制作方法
1.本发明涉及心腔内超声显像技术技术领域,特别是涉及一种环形阵列换能器及前向性心脏腔内超声鞘管。
背景技术:
2.心脏及外周血管介入手术由于其微创、安全已经取代外科手术成为临床最为广泛的术式。常见的临床场景包括血管支架植入、心脏起搏器植入、心律失常导管消融、结构性心脏病介入等。以上手术操作均需要在x线实时导引下将手术器械(包括:导丝、穿刺针、球囊、封堵器起搏器电极、消融导管等)定向送入、贴靠、穿透或固定于特定的心血管解剖部位。因此,此类手术目前对x线的依赖仍较大,学习曲线较长,不利于广泛开展。
3.心脏腔内超声(ice)导管成像是一种新兴的介入影像技术,它是通过血管途径,将安置有微型超声换能器探头的弹型导管直接插入血管及心腔内,发射并接收高频超声信号,可以提供实时的高分辨率解剖信息,既包括心脏结构的识别,也包括心脏内实时跟踪导管位置,同时有效识别手术并发症,例如心包填塞,血栓形成等。另外,其具有操作简单,不需要额外人员辅助;无辐射;无需全麻的优势。使得ice已经替代传统的数字减影血管造影技术(dsa)成为了目前心脏介入手术的最理想成像工具。
4.目前临床上利用ice成像指导心脏介入手术仍存在较明显的局限性,限制了其应用价值。主要表现为:目前临床上应用的ice为侧视、二维,ice导管与介入通道和器械为分离状态,引导介入手术时,需要耐心调整ice扇面追踪介入器械,获得其长轴超声影象,需要术者和助手娴熟的配合,耗时耗力,学习周期长,应用局限。
技术实现要素:
5.本发明主要解决的技术问题是提供一种前向性心脏腔内超声鞘管,以解决现有技术中存在的ice为侧视、二维,ice导管与介入通道和器械为分离状态,引导介入手术时,需要耐心调整ice扇面追踪介入器械,获得其长轴超声影象,需要术者和助手娴熟的配合,耗时耗力,学习周期长,应用局限的问题。
6.为解决上述技术问题,本发明采用的一个技术方案是:提供一种环形阵列换能器,包括:
7.吸能筒,包括位于内孔孔壁的第一环形安装面以及位于一端的第二环形安装面;
8.挠性电路层,设置在所述第一环形安装面上,所述挠性电路层包括若干均匀间隔排列的挠性电路,每一挠性电路沿所述吸能筒的轴向延伸设置,且挠性电路一端设置设有折弯延伸至所述第二环形安装面上的延伸段;
9.有源元件层,设置在所述第二环形安装面上,所述有源元件层包括呈放射状设置若干有源元件,每一有源元件与一所述挠性电路的所述延伸段对应连接,且一有源元件和一延伸段配合组成一连接单元;
10.声学匹配层,粘结在所述第二环形安装面覆盖所述有源元件层。
11.在一个或多个实施方式中,所述第二环形安装面上开设有与若干所述连接单元一一对应的容置槽。
12.本发明采用的另一个技术方案是:提供一种环形阵列换能器的制备方法,包括:
13.将有源元件层与挠性电路层粘结,形成第一元件;
14.将所述第一元件切割成均匀排列的若干微小阵子,每一微小阵子包括一有源元件和一挠性电路;
15.将每一所述微小阵子弯折,以使微小阵子被分为第一段和第二段,其中第一段包括部分所述挠性电路,第二段包括另一部分挠性电路和所述有源元件;
16.将所述若干微小阵子的所述第一段均匀排列呈环形,所述第二段朝外侧延伸设置;
17.将吸能筒套设固定在所述若干微小阵子外,其中吸能筒内壁与所述第一段的至少一部分粘合,吸能筒的一端面与所述第二段粘合;
18.在所述吸能筒端面粘合声学匹配层,覆盖所述有源元件。
19.在一个或多个实施方式中,所述将所述第一元件切割成均匀排列的若干微小阵子,每一微小阵子包括一有源元件和一挠性电路的步骤具体包括:
20.将所述第一元件粘合在uv减粘膜上;
21.将所述第一元件切割成均匀排列的若干微小阵子,每一微小阵子包括一有源元件和一挠性电路;
22.对所述uv减粘膜进行uv光照解胶,取出所述若干微小阵子。
23.本发明采用的又一个技术方案是:提供一种前向性心脏腔内超声鞘管,包括鞘管,所述鞘管包括相对设置的远端和近端,所述远端设有上述任一实施方式所述的环形阵列换能器
24.在一个或多个实施方式中,所述鞘管包括内管和外管,所述环形阵列换能器位于所述内管和外管之间,且套设在内管外,所述第二环形安装面位于面向所述远端的一侧,所述环形阵列换能器通过穿过所述内管和外管的间隙的导线连接至所述近端实现信号传输。
25.在一个或多个实施方式中,所述鞘管远端端面设有声学透镜。
26.在一个或多个实施方式中,所述外管内部中空设置,形成有由所述近端延伸至所述远端旁的导向通道,所述导向通道内插设有导向丝,所述导向丝靠近所述远端的端部与所述外管固定以实现所述远端的弯折角度控制。
27.在一个或多个实施方式中,所述鞘管的近端连接有手柄,所述手柄上套设有与所述导向丝连接的旋转机构,所述旋转机构用于控制所述导向丝的移动。
28.在一个或多个实施方式中,所述鞘管中心开设有沿鞘管轴向延伸设置的介入通道,所述鞘管近端设有用于密封所述介入通道的密封装置。
29.区别于现有技术,本技术的有益效果是:
30.本技术环形阵列换能器能够实现环形成像,结构简单,操作便捷,对应操作者的学习周期要求较低,应用范围广;
31.本技术环形阵列换能器的制备方法操作简单,成本低,并能够保证制作精度;
32.本技术的前向性心脏腔内超声鞘管通过环形阵列换能器的环形成像,能够更加方便的由血管介入心腔内,大大减少了x线暴露;
33.本技术的前向性心脏腔内超声鞘管将超声成像导管与介入通道合二为一,调整鞘管使得目标区域成像后,沿着鞘管送入介入器械可直接到位,操作方便、安全、简单,而且拓展了目前ice的应用场景,大大减少了这类手术的x线依赖,甚至可做到零x线;
34.本技术的前向性心脏腔内超声鞘管能够实现远端弯折角度调节,从而便于鞘管在体内介入方向的调整,便于介入。
附图说明
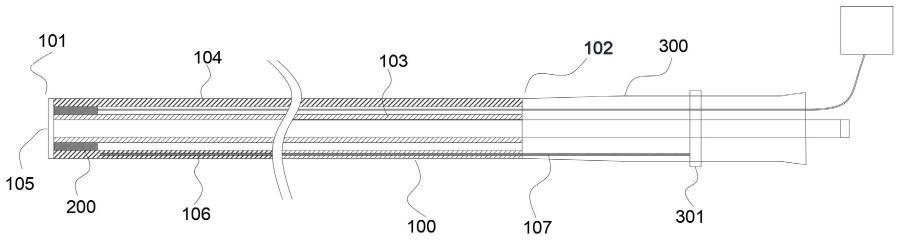
35.图1是本技术前向性心脏腔内超声鞘管一实施方式的结构示意图;
36.图2是本技术环形阵列换能器一实施方式的结构示意图;
37.图3是本技术环形阵列换能器一实施方式的部分结构示意图。
38.图中所示:
39.鞘管100;远端101;近端102;内管103;外管104;声学透镜105;导向通道106;导向丝107;
40.环形阵列换能器200;吸能筒201;第一环形安装面2011;第二环形安装面2012;容置槽2013;挠性电路层204;挠性电路2041;延伸段2042;有源元件层205;有源元件2051;声学匹配层206;
41.手柄300;旋转机构301。
具体实施方式
42.下面结合附图和实施方式对本发明进行详细说明。
43.请参阅图1,图1是本技术前向性心脏腔内超声鞘管一实施方式的结构示意图。
44.该前向性心脏腔内超声鞘管包括鞘管100,鞘管100包括相对设置的远端101和近端102,其中远端101设置有环形阵列换能器200。
45.鞘管100包括内管103和外管104,环形阵列换能器200位于内管103和外管104之间,且套设在内管103外,且环形阵列换能器200通过穿过内管103和外管104的间隙的导线连接至近端102实现信号传输。
46.具体地,请参阅图2和图3,图2是本技术环形阵列换能器一实施方式的结构示意图,图3是本技术环形阵列换能器一实施方式的部分结构示意图。
47.该环形阵列换能器200包括吸能筒201。
48.吸能筒201包括位于内孔孔壁的第一环形安装面2011以及位于一端的第二环形安装面2012。
49.第一环形安装面2011上设有挠性电路2041
·
层204,挠性电路层204包括若干均匀间隔排列的挠性电路2041,每一挠性电路2041沿吸能筒201的轴向延伸设置,且挠性电路2041一端设置设有折弯延伸至第二环形安装面2012上的延伸段2042。
50.第二环形安装面2012上设有源元件层205,有源元件层205包括呈放射状设置若干有源元件2051,每一有源元件2051与一挠性电路2041的延伸段2042对应连接,且一有源元件2051和一延伸段2042配合组成一连接单元。
51.第二环形安装面2012上粘结有覆盖有源元件层205的声学匹配层206。
52.可以理解的,在第二环形安装面2012上呈放射状设置的若干有源元件2051,且每
一有源元件2051均通过一挠性电路2041实现信号传输,能够实现环形成像,更加方便在超声引导下将鞘管100经血管送入心腔。
53.当环形阵列换能器200应用至前向性心脏腔内超声鞘管100中时,挠性电路层204之间粘合在内管103外壁上,吸能筒201套设在内管103外壁上覆盖挠性电路层204的至少部分,挠性电路2041的延伸段2042则朝外侧延伸设置与吸能筒201靠近远端101一段面贴合固定。
54.为了进一步保证有源元件2051和挠性电路2041的排列均匀,吸能筒201的第二环形安装面2012上开设有与若干连接单元一一对应的容置槽2013。
55.如图1所示,为了进一步提高环形阵列换能器200的成像效果,鞘管100远端101端面还设置有声学透镜105。
56.为了进一步便于鞘管100在体内的介入,外管104内部中空设置,形成有由近端102延伸至远端101旁的导向通道106,导向通道106内插设有导向丝107,导向丝107靠近远端101的端部与外管104固定以实现远端101的弯折角度控制。
57.其中,导向丝107可以是高强度的钢丝,也可以采用其他材料。通过拉动导向丝107,能够带动与导向丝107固定的锚点运动,从而带动鞘管100远端101弯曲调节方向,实现介入方向的调整,从而便于鞘管100在体内的介入。
58.为了实现导向丝107的精准控制,本实施方式中鞘管100近端102连接有手柄300,手柄300上设有与导向丝107连接的旋转机构301,旋转机构301可通过旋转沿手柄300滑动,从而带动导向丝107运动。在一个应用场景中,旋转机构301可以和手柄300螺纹配合,实现旋转运动与直线运动之间的转换,从而提高导向丝107运动的精确度。
59.为了在实现超声成像的同时,实现介入通道的设置,本实施方式中鞘管100中心开设有沿鞘管100轴向延伸设置的介入通道。当鞘管100通过环形阵列换能器200的超声成像介入到位后,可通过介入通道实现介入器械的直接到位,操作方便、安全、简单,而且拓展了目前ice的应用场景,大大减少了这类手术的x线依赖,甚至可做到零x线。
60.为了避免血液由介入通道流出,介入通道的近端102还设有密封装置。
61.该制备方法包括:
62.s100将有源元件层与挠性电路层粘结,形成第一元件。
63.s200将第一元件切割成均匀排列的若干微小阵子,每一微小阵子包括一有源元件和一挠性电路。
64.具体地,在一个实施方式中,s200具体包括:
65.将第一元件粘合在uv减粘膜上;
66.将第一元件切割成均匀排列的若干微小阵子,每一微小阵子包括一有源元件和一挠性电路;
67.对uv减粘膜进行uv光照解胶,取出若干微小阵子。
68.可以理解的,通过将第一元件先粘合固定,切割完成后再进行解胶,能够有效保证切割精度,并便于操作。
69.s300将每一微小阵子弯折,以使微小阵子被分为第一段和第二段,其中第一段包括部分挠性电路,第二段包括另一部分挠性电路和有源元件。
70.s400将若干微小阵子的第一段均匀排列呈环形,第二段朝外侧延伸设置。
71.s500将吸能筒套设固定在若干微小阵子外,其中吸能筒内壁与第一段的至少一部分粘合,吸能筒的一端面与第二段粘合。
72.s600在吸能筒端面粘合声学匹配层,覆盖有源元件。
73.以上仅为本发明的实施方式,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1