一种手部放射摄片摆位规范评判装置及系统
1.本发明涉及x线放射摄片技术领域,尤其是涉及一种手部放射摄片摆位规范评判装置及系统。
背景技术:
2.x线摄片检查能够观察到骨骼和软组织之间的良好对比度,已成为四肢特别是手部影像学检查最常用的方式之一,用于确定四肢骨骼、关节、软组织等的病变位置和病变程度。为了获得能够满足临床诊断要求的四肢解剖结构影像,x线摄片检查过程需要遵循相应的放射摄片规范。由于放射技师技术水平和对规范的理解存在个体差异,实践中常出现由于摆位不正导致采集的影像质量不符合诊断要求的现象,因而临床存在一定的废片率。x线摄片数量基数较大,产生不合格影像的数量相当可观,这不仅降低了影像诊断质量和医疗资源的使用效率,同时会给被检者增加不必要的电离损伤。因此,在教学培训和临床应用中都需要一种能客观评判放射摄影技术实施准确程度的方法,以协助实现放射影像的质量控制和保证,从而提高放射影像检查的准确性和一致性。
3.为了有效提高影像技师的摆位技巧,根据放射影像摄片行业规范和标准指南,目前有研究开发了自动识别方法及系统。如公开号cn110689521b(一种医学影像所属人体部位的自动识别方法及系统)公开的一种医学影像所属人体部位的自动识别方法及系统。但手部掌指骨姿态变化多样,因此不能将该类模拟仿真技术直接运用到手部放射摄片检查训练的应用中。有研究试图通过摄像机监控和提取手部轮廓的变化,用以判断手部摄片摆位的规范性,但这种方法依赖的摄像机只能获取手部姿态的二维投影图像,无法准确反映手部各个解剖结构的复杂空间姿态,因此对手部的斜位和侧位姿态判断准确率很低。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种可靠性高的手部放射摄片摆位规范评判装置及系统。
5.本发明的目的可以通过以下技术方案来实现:
6.本发明的一个方面,提供一种手部放射摄片摆位规范评判装置,包括:
7.支撑板,提供放置手部的载体;
8.光学位置跟踪模块,位于所述支撑板上方,用于在同一坐标系下获取手部关键解剖结构和支撑板的空间相对位置,跟踪识别当前手部摆位姿态的类别,并获得规范性判断结果。
9.进一步地,所述手部关键解剖结构包括掌骨、指骨、连接掌骨和腕骨的掌腕关节、连接掌骨和指骨的掌指关节、连接指骨的指间关节以及指尖。
10.进一步地,所述光学位置跟踪模块包括:
11.多个光学传感器,用于监控获得所述手部关键解剖结构的空间位置以及所述支撑板的顶点位置;
12.处理芯片,与所述光学传感器连接,获取所述手部关键解剖结构的空间位置以及支撑板的顶点位置,构建手部三维模型,获得手部关键解剖结构和支撑板的空间相对位置,基于所述空间相对位置获得手部摆位姿态的量化描述,基于所述手部姿态量化描述以及判定标准获得所述规范性判断结果。
13.进一步地,所述处理芯片包括:
14.偏离判断单元,用于判断手部是否偏离支撑板;
15.规范性判断单元,在所述偏离判断单元的判断结果为否时响应,用于获取所述手部姿态量化描述,识别当前手部摆位姿态的类别,并基于对应类别的判定标准判断当前手部摆位姿态是否规范。
16.进一步地,所述手部摆位姿态的类别包括手正位、手侧位或手掌下斜位。
17.进一步地,所述手部姿态量化描述包括手掌面角度、相邻手指间夹角、手指指尖间距、指平面与掌平面的夹角、拇指与食指夹角中的一个或多个。
18.进一步地,所述光学位置跟踪模块还包括用于提供光学传感器工作时光强的近红外光源。
19.本发明的第二个方面,提供一种手部放射摄片系统,包括如上所述的手部放射摄片摆位规范评判装置和x射线球管,所述光学位置跟踪模块安装于x射线球管上,共同位于所述支撑板上方,所述支撑板为用于采集穿过手部x射线信号形成放射摄片影像的数字平板探测器,该数字平板探测器位于x射线球管的视野范围内;
20.该手部放射摄片系统工作时,所述光学位置跟踪模块获取摆放于数字平板探测器上的手部的关键解剖结构和数字平板探测器的空间相对位置,跟踪识别当前手部摆位姿态的类别,并获得规范性判断结果,当判断结果为规范时,产生可进行摄片的指令。
21.该手部放射摄片系统工作前,设置x射线球管的投射方向、曝光参数、放射野和投影中心。
22.本发明的第三个方面,提供一种手部放射摄片训练系统,包括如上所述的手部放射摄片摆位规范评判装置,该手部放射摄片训练系统工作时,所述光学位置跟踪模块获取摆放于支撑板上的训练者的手部的关键解剖结构和支撑板的空间相对位置,跟踪识别当前手部摆位姿态的类别,并获得规范性判断结果,依据所述判断结果,产生训练指导指令。
23.与现有技术相比,本发明具有以下有益效果:
24.1、本发明通过光学位置跟踪模块可获得手部三维模型,准确获取手部姿态特征,判断手部摆位是否规范,可实现在曝光摄片前对手部摆位的规范性进行判断,因此可以有效地降低废片率,提升放射科的影像质量控制水准。
25.2、由于不需要实际曝光就可以预测摄片的质量,因此可以实现在没有辐射条件下的摆位训练目的,同时可以根据手部摆位偏离标准体位的程度,对技师的摆位结果进行评分,以达到检验技师的工作成效或摆位学习训练效果,促进技师摆位操作技能的提升。
附图说明
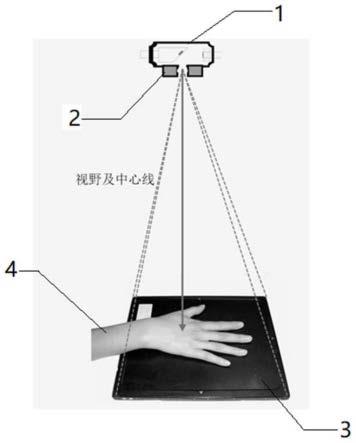
26.图1为本发明装置的结构示意图;
27.图2为手部三维模型示意图;
28.图3为手部关键解剖结构示意图及其对应的放射摄片影像;
29.图4为光学位置跟踪模块外观示意图;
30.图5为手正位摆放姿态演示及三维模型,其中,5a为手正位摆放姿态,5b为对应的三维模型;
31.图6为手侧位摆放姿态演示及三维模型,其中,6a为手侧位摆放姿态,6b为对应的三维模型;
32.图7为手下斜位摆放姿态演示及三维模型,其中,7a为手下斜位摆放姿态,7b为对应的三维模型;
33.图8为实施例中手部放射摄片系统的工作过程示意图。
具体实施方式
34.下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
35.实施例1
36.本实施例提供一种手部放射摄片摆位规范评判装置,包括支撑板3和光学位置跟踪模块2,支撑板3提供放置手部4的载体;光学位置跟踪模块2位于所述支撑板3上方,用于在同一坐标系下获取手部关键解剖结构和支撑板的空间相对位置,跟踪识别当前手部摆位姿态的类别,并获得规范性判断结果。
37.如图4所示,本实施例的光学位置跟踪模块多个光学传感器和处理芯片,多个光学传感器用于监控获得所述手部关键解剖结构的空间位置以及所述支撑板的顶点位置,以方便观察手部关键解剖结构和支撑板的空间位置变化情况;处理芯片与所述光学传感器连接,如图2所示,获取所述手部关键解剖结构的空间位置以及支撑板的顶点位置,构建手部三维模型,获得手部关键解剖结构和支撑板的空间相对位置,基于所述空间相对位置获得手部摆位姿态的量化描述,基于所述手部姿态量化描述以及判定标准获得所述规范性判断结果。所述手部关键解剖结构包括掌骨、指骨、连接掌骨和腕骨的掌腕关节、连接掌骨和指骨的掌指关节、连接指骨的指间关节以及指尖,手部各个解剖关节和骨结构的命名排序按照拇指、食指、中指、无名指和尾指进行。如图3所示,其中,1a表示指尖,1b表示指间关节,1c表示掌指关节,1d表示手掌中心,1e表示掌腕关节,1f表示腕关节。支撑板的空间位置通过支撑板的四个顶点a-d的位置确定。
38.在一个具体实施例,处理芯片包括偏离判断单元和规范性判断单元,其中,偏离判断单元用于判断手部是否偏离支撑板;规范性判断单元在所述偏离判断单元的判断结果为否时响应,用于获取所述手部姿态量化描述,识别当前手部摆位姿态的类别,并基于对应类别的判定标准判断当前手部摆位姿态是否规范。
39.具体地,判断手部是否偏离支撑板为:根据手掌中心与支撑板中心的距离是否小于1/8支撑板大小判断手部是否已经位于支撑板中心区域,否则提示手部摆位偏离支撑板。
40.手部摆位姿态的类别包括手正位、手侧位、手掌(后前)下斜位等常用体位。其中,
41.手正位评判规范为:手水平置于平板探测器上,五指伸直并自然分开,掌心向下紧贴台面,放射摄片时,中心线对准第3掌骨头垂直射入;
42.手侧位评判规范为:腕部及手指伸直,掌面垂直于探测器放置,拇指打开并位于其
余四指前方,第5掌骨紧贴探测器且掌面与探测器垂直,放射摄片时,中心线对准第2掌骨头垂直射入;
43.手掌下斜位评判规范为:第5掌骨紧贴探测器,掌面向内倾斜并与探测器成45
°
,五指均匀分开稍弯曲,放射摄片时,中心线对准第5掌骨头垂直射入。
44.基于上述评判规范,在获得手部姿态量化描述可以获得手部摆位是否规范的判断结果,手部姿态量化描述包括手掌面角度、相邻手指间夹角、手指指尖间距、指关节2-9形成的指平面与掌平面的夹角、拇指与食指夹角中的一个或多个。
45.具体地,正位条件分支的判断包括:
46.·
如果掌面角度大于20度且小于50度,判断手掌未贴近和未平行平板探测器,为错误正位;
47.·
如果掌面角度小于20度,但相邻手指间夹角小于5度或者大于30度,判断手掌平行于探测器,但手指未自然张开,为错误正位;
48.·
当掌面角度小于20度,且相邻手指间夹角介于5到30度,判断手部摆位为标准正位。
49.侧位条件分支的判断包括:
50.·
如果掌面角度大于80度,且指关节2-9形成的指平面与掌平面的夹角大于10度,判断手指未伸直,为错误侧位;
51.·
如果掌面角度大于80度,且拇指与食指夹角小于10度,判断拇指未张开前伸,为错误侧位;
52.·
如果掌面角度大于80度,且拇指与食指夹角大于10度,为标准侧位。
53.下斜位条件分支的判断包括:
54.·
如果掌面角度介于50-80度,且手指指尖间距小于5%手掌大小,判断五指未均匀分开,为错误斜位;
55.·
如果掌面角度介于50-80度,且手指指尖间距大于5%手掌大小,为标准下斜位。
56.图5-7分别演示了手部正、侧和下斜位姿态及其对应关键解剖结构的空间三维模型。
57.在一个优选的实施方式中,光学位置跟踪模块还包括用于提供光学传感器工作时光强的近红外光源。这样可以削弱环境光对位置跟踪效果的影响,增强光学传感器获取手部关键解剖结构空间位置的能力。
58.实施例2
59.本实施例提供一种手部放射摄片系统,包括如实施例1所述的手部放射摄片摆位规范评判装置,还包括x射线球管1,所述光学位置跟踪模块2安装于x射线球管1上,共同位于所述支撑板3上方,所述支撑板3为用于采集穿过手部x射线信号形成放射摄片影像的数字平板探测器,该数字平板探测器位于x射线球管的视野范围内。该手部放射摄片系统工作时,所述光学位置跟踪模块获取摆放于数字平板探测器上的手部的关键解剖结构和数字平板探测器的空间相对位置,跟踪识别当前手部摆位姿态的类别,并获得规范性判断结果,当判断结果为规范时,产生可进行摄片的指令。
60.如图8所示,该手部放射摄片系统的具体工作过程包括以下步骤:
61.步骤一、设定x线球管和平板探测器位置,保证正确的投射方向和曝光参数,通过
与球管相对位置关系标定已知的光学位置跟踪模块,实时跟踪探测器空间位置,并判断放射野和投影中心的设定符合手部摄片的规范要求;
62.步骤二、选定需要拍摄的手部摆放姿态;
63.步骤三,通过光学位置跟踪模块检测并得到手部空间位置数据;
64.步骤四,根据手部空间位置数据建立手部的三维模型,根据评判标准型进行评判,将结果反馈在可视化界面;
65.步骤五,评判结果为规范时,产生可进行摄片的指令,进行手部放射摄片。
66.实施例3
67.本实施例提供一种手部放射摄片训练系统,包括如实施例1所述的手部放射摄片摆位规范评判装置,该手部放射摄片训练系统工作时,所述光学位置跟踪模块获取摆放于支撑板上的训练者的手部的关键解剖结构和支撑板的空间相对位置,跟踪识别当前手部摆位姿态的类别,并获得规范性判断结果,依据所述判断结果,产生训练指导指令。在不同手部摆位类别中,根据其摄片的规范要求,评估各个手部摆位的规范程度,并给予提示信息,根据手部摆位偏离标准体位的程度,对技师的摆位结果进行评分,以达到检验技师的工作成效或摆位学习训练效果,促进技师摆位操作技能的提升。
68.以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1