手柄及吻合器的制作方法
本发明涉及医疗器械,特别是涉及手术器械的手柄及吻合器。
背景技术:
1、吻合器是医学上使用的替代手工缝合的设备,主要用于腔镜外科手术下肿瘤组织切除和切口的闭合。吻合器在手术使用时,需要将其钳口闭合通过穿刺器进入腹腔,在进入腹腔之后,则需要再次打开钳口以便夹闭组织进行吻合和切割操作。现有技术中,吻合器需要闭合进入腹腔,进入之后需要张开钳口,再闭合夹持需要吻合的组织部位,待确定可进行吻合时,则需要切换吻合器模式,由非击发状态进入击发状态,从而完成吻合钉的击发压榨实现吻合。然而实现该功能需要通过切换按钮带动一系列的零部件进行联动作用方能实现,整个吻合器的结构复杂,造价成本较高。
技术实现思路
1、基于此,有必要针对现有技术中的吻合器模式切换功能需要通过一系列的零部件进行联动作用才能实现,整个吻合器的结构复杂,造价成本较高的技术问题,提供一种手柄。
2、一种手术器械的手柄,其包括:
3、安装壳,所述安装壳形成有固定把手部分;
4、活动把手,所述活动把手可转动连接于所述安装壳,且至少部分设置于所述安装壳内部;
5、齿条滑动件,所述齿条滑动件滑动设置于所述安装壳中,所述齿条滑动件近端构造有多个间隔排布的齿,所述齿条滑动件远端构造有限位结构;
6、棘爪,所述棘爪可转动连接于所述活动把手设置于所述安装壳内的一端,且所述棘爪可选择地与所述限位结构或所述齿连接;当所述棘爪与所述限位结构连接时,所述活动把手通过所述棘爪可驱动所述齿条滑动件往复移动;当所述棘爪与所述齿连接时,所述活动把手通过所述棘爪可驱动所述齿条滑动件向远端做单向移动。
7、在其中一个实施例中,所述棘爪构造有爪结构,所述爪结构包括双向驱动爪和单向驱动爪;
8、当所述棘爪与所述限位结构连接时,所述双向驱动爪与所述限位结构连接;当所述棘爪与所述齿连接时,所述单向驱动爪与所述齿抵接。
9、在其中一个实施例中,所述单向驱动爪与所述双向驱动爪的延伸方向不同,且所述单向驱动爪的数量为两个,两个所述单向驱动爪间隔设置;所述双向驱动爪设置于两个所述单向驱动爪之间。
10、在其中一个实施例中,所述齿条滑动件还构造有避让槽,所述避让槽沿所述齿条滑动件的长度延伸方向延伸,其延伸长度不小于所述齿的排布长度,且设置于所述齿中间;当所述单向驱动爪与所述齿抵接时,所述双向驱动爪置于所述避让槽中。
11、在其中一个实施例中,所述限位结构为限位孔,当所述棘爪与所述限位结构连接时,所述双向驱动爪至少部分插入所述限位孔实现插接连接。
12、在其中一个实施例中,所述手柄还包括状态切换组件,所述状态切换组件安装于所述活动把手设置于所述安装壳中的部分,所述状态切换组件与所述棘爪连接,用于控制所述棘爪与所述限位结构脱开或连接。
13、在其中一个实施例中,所述状态切换组件包括切换按钮、切换滑块和切换销轴;
14、所述切换滑块滑动设置于所述活动把手靠近所述棘爪的一端;所述切换销轴与所述切换滑块的一端连接并与所述棘爪连接;所述切换按钮安装于所述活动把手靠近所述棘爪的一端,并与所述切换滑块连接;
15、所述切换按钮用于驱动所述切换滑块往复移动,从而驱动所述棘爪转动,使得所述棘爪与所述限位结构或所述齿脱开或连接。
16、在其中一个实施例中,所述状态切换组件还包括第一弹性件,所述第一弹性件一端抵接所述活动把手,另一端抵接所述切换滑块。
17、在其中一个实施例中,所述手柄还包括第二弹性件,所述第二弹性件的一端连接于所述安装壳,所述第二弹性件的另一端连接于所述活动把手。
18、本发明还提供一种吻合器,能够解决上述至少一个技术问题。
19、本发明提供的吻合器,包括上述实施例任一项所述的手柄,还包括钳头,细长轴,钳头驱动件;
20、所述细长轴固定连接于所述手柄,所述钳头连接于所述细长轴远离所述手柄的一端,所述齿条滑动件与所述钳头驱动件连接,从而通过控制所述齿条滑动件以控制所述钳头驱动件执行所述钳口的张开、闭合或压榨。
21、本发明的有益效果:
22、本发明提供的一种手柄,将其安装在吻合器上。当吻合器在进入腹腔时,则将棘爪与齿条滑动件上的限位结构连接,以使得吻合器处于未击发模式,此时活动把手能够驱动齿条滑动件做往复运动,进而使得与齿条滑动件连接的钳口在张合和闭合状态之间切换,实现吻合器通过穿刺器较易进入腹腔和进入后的张开,以及再次闭合进行组织夹持的功能。当确定目标组织的吻合部位,此时闭合钳口,实现夹持,然后通过状态切换组件将吻合器模式从未击发模式切换为击发模式,此时棘爪与齿条滑动件上的齿连接,使得活动把手通过棘爪驱动齿条滑动件向远端做单向运动,实现对吻合部位的压榨吻合。由于本手柄仅需要通过改变棘爪与齿条滑动件的连接位置,即可实现吻合器在未击发模式下钳口的闭合和张开,以及从未击发模式到击发模式之间的切换,实现结构简单方便,造价成本也降低,经济效益较好。
技术特征:
1.一种手术器械的手柄,其特征在于,包括:
2.根据权利要求1所述的手柄,其特征在于,所述棘爪(300)构造有爪结构,所述爪结构包括双向驱动爪(312)和单向驱动爪(311);
3.根据权利要求2所述的手柄,其特征在于,所述单向驱动爪(311)与所述双向驱动爪(312)的延伸方向不同,且所述单向驱动爪(311)的数量为两个,两个所述单向驱动爪(311)间隔设置;所述双向驱动爪(312)设置于两个所述单向驱动爪(311)之间。
4.根据权利要求3所述的活动把手,其特征在于,所述齿条滑动件(200)还构造有避让槽(230),所述避让槽(230)沿所述齿条滑动件(200)的长度延伸方向延伸,其延伸长度不小于所述齿(220)的排布长度,且设置于所述齿(220)中间;当所述单向驱动爪(311)与所述齿(220)抵接时,所述双向驱动爪(312)置于所述避让槽(230)中。
5.根据权利要求2所述的手柄,其特征在于,所述限位结构为限位孔(210),当所述棘爪(300)与所述限位结构连接时,所述双向驱动爪(312)至少部分插入所述限位孔(210)实现插接连接。
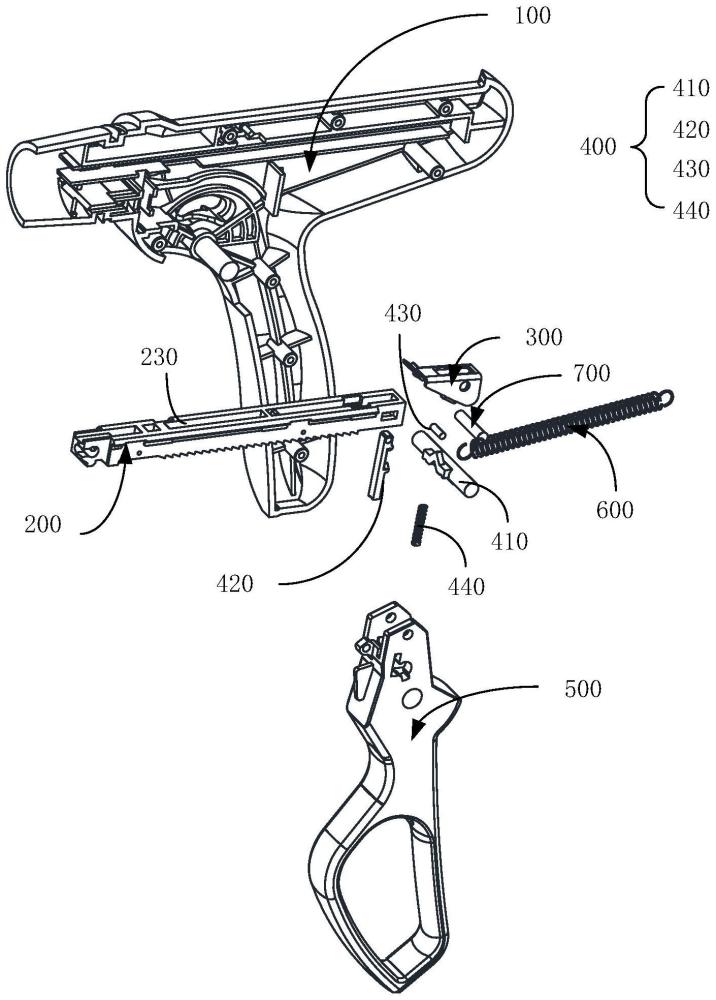
6.根据权利要求1所述的手柄,其特征在于,所述手柄还包括状态切换组件(400),所述状态切换组件(400)安装于所述活动把手(500)设置于所述安装壳(100)中的部分,所述状态切换组件(400)与所述棘爪(300)连接,用于控制所述棘爪(300)与所述限位结构脱开或连接。
7.根据权利要求6所述的手柄,其特征在于,所述状态切换组件(400)包括切换按钮(410)、切换滑块(420)和切换销轴(430);
8.根据权利要求7所述的手柄,其特征在于,所述状态切换组件(400)还包括第一弹性件(440),所述第一弹性件(440)一端抵接所述活动把手(500),另一端抵接所述切换滑块(420)。
9.根据权利要求1所述的手柄,其特征在于,所述手柄还包括第二弹性件(600),所述第二弹性件(600)的一端连接于所述安装壳(100),所述第二弹性件(600)的另一端连接于所述活动把手(500)。
10.一种吻合器,其特征在于,包括权利要求1-9任一项所述的手柄,还包括钳头,细长轴,钳头驱动件;
技术总结
本发明涉及一种手术器械的手柄及吻合器,其包括安装壳、活动把手、齿条滑动件和棘手。安装壳形成有固定把手部分;活动把手可转动连接于安装壳且至少部分设置于安装壳内部;齿条滑动件滑动设置于安装壳中,齿条滑动件近端构造有多个间隔排布的齿,齿条滑动件远端构造有限位结构;棘爪可转动连接于活动把手设置于安装壳内的一端,且棘爪可选择地与限位结构或齿连接;当棘爪与限位结构连接时,活动把手通过棘爪可驱动齿条滑动件往复移动;当棘爪与齿连接时,活动把手通过棘爪可驱动齿条滑动件向远端做单向移动。本手柄通过改变棘爪与齿条滑动件的连接位置,即可实现吻合器在未击发模式下钳口的闭合和张开,以及从未击发模式到击发模式之间的切换。
技术研发人员:潘贞,林晋生,杨兵
受保护的技术使用者:武汉联影智融医疗科技有限公司
技术研发日:
技术公布日:2024/3/11
- 还没有人留言评论。精彩留言会获得点赞!