一种手术刀实时监测系统及其方法与流程
1.本发明属于医疗监测技术领域,尤其涉及一种手术刀实时监测系统及其方法。
背景技术:
2.机器人手术系统是集多项现代高科技手段于一体的综合体,其用途广泛,在临床外科上有大量的应用。目前临床中使用的机器人手术系统,最重大的挑战是如何在复杂条件下对小组织或微小组织进行适当的手术治疗,以血管外科为例,操作者很难判断手术刀或手术刀是否接触到血管,在这种情况下,任何与血管的不当接触都会导致术中或术后出血,目前虽然有基于视频或触觉的机器人手术系统,但大都还存在一些断刀或错刀的问题,难以对手术进行精准操控。因此,要想保证手术能够精准安全高效,在手术过程中,对手术刀运动状态的实时监测极其重要。
技术实现要素:
3.为解决上述问题,本发明提供一种手术刀实时监测系统及其方法,预先设定手术刀的运动轨迹,实时监测手术刀的运动状态,避免了出现断刀或错刀等手术不规范情况,保证了手术的精准度。
4.一方面为实现上述目的,本发明提供了一种手术刀实时监测系统,包括:轨迹规划模块、轨迹导航模块、监测模块与预警模块;
5.所述轨迹规划模块用于规划手术刀的运动轨迹,获得规划轨迹;
6.所述轨迹导航模块用于构建导航影像,并根据所述规划轨迹引导手术刀的运动;
7.所述监测模块用于实时监测手术刀的运动状态,并将所述规划轨迹与所述运动状态进行对比分析;
8.所述预警模块用于根据所述规划轨迹进行预先提示,以及根据分析结果进行预警。
9.可选地,所述轨迹规划模块包括重建单元与设计单元;
10.所述重建单元对患者的mri与ct数据进行高清重建,构建患者的三维解剖图像;
11.所述设计单元根据所述三维解剖图像进行3d打印,根据打印结果设计手术方案中手术刀的规划轨迹。
12.可选地,所述轨迹导航模块包括内窥镜单元、虚实影像构建单元、标记单元与第一显示单元;
13.所述内窥镜单元用于采集手术部位图像;
14.所述虚实影像构建单元用于根据所述手术部位图像,构建虚实结合的导航影像;
15.所述标记单元用于将所述规划轨迹在所述导航影像中标记出来;
16.所述第一显示单元用于显示所述导航影像与所述规划轨迹。
17.可选地,所述虚实影像构建单元包括光学追踪器、光学定位仪与导航仪;
18.所述光学追踪器位于所述内窥镜单元上与患者身体上;用于反射红外光线;
19.所述光学定位仪用于发出红外光线,并接收所述光学追踪器反射的红外光线,根据接收的红外光线获取患者身体与内窥镜单元的实时相对位置,
20.所述导航仪用于根据患者的mri与ct数据、所述手术部位图像与所述实时相对位置,构建出虚实结合的所述导航影像。
21.可选地,所述监测模块包括图像采集单元、传感单元、数据处理单元、分析单元和第二显示单元;
22.所述图像采集单元,用于实时获取手术刀的运动状态;
23.所述传感单元,用于获取手术刀施加在手术部位的力信息;
24.所述数据处理单元,用于对所述力信息进行处理,获取接触曲线;
25.所述第二显示单元,用于显示手术刀的所述运动状态和所述接触曲线;
26.所述分析单元用于判断所述运动状态和所述接触曲线是否满足所述规划轨迹,获取分析结果。
27.可选地,所述预警模块包括预先提示单元与警告单元,
28.所述预先提示单元根据所述规划轨迹进行预先提示,所述预先提示为即将进行的手术刀动作状态的提示;
29.所述警告单元用于根据所述分析结果发出错误警报。
30.可选地,所述手术刀实时监测系统还包括远程监测终端;
31.所述远程监测终端将所述导航影像、规划轨迹与手术刀的实时运动状态在远程显示,用于远程监测与会诊交流。
32.另一方面为实现上述目的,本发明还提供了一种手术刀实时监测方法,包括:
33.基于患者的mri与ct数据规划手术刀的运动轨迹,获得规划轨迹;
34.构建虚实结合的导航影像,将所述规划轨迹在所述导航影像中进行标记,并根据所述规划轨迹引导手术刀的运动;
35.实时监测手术刀的运动状态,并将所述规划轨迹与所述运动状态进行对比分析;
36.根据所述规划轨迹进行手术刀运动状态的预先提示,以及根据分析结果进行预警。
37.可选地,所述手术刀实时监测方法还包括:
38.将所述导航影像、规划轨迹与手术刀的实时运动状态在远程显示,完成远程监测与会诊交流。
39.与现有技术相比,本发明具有如下优点和技术效果:
40.本发明通过迹规划模块预先规划手术刀的运动轨迹,为手术中的手术刀运动状态提供规范,通过轨迹导航模块构建虚实结合的导航影像,实现混合现实效果,以缓解现有手术导航中,图像引导空间与真实手术场景的差异导致的定位误差问题,帮助医生在手术中更好地掌握周围血管,脏器等组织结构信息与病变组织信息,同时专注于真实的手术画面进行操作,让操作者能够有更好的视野和辨别力,通过监测与预警模块,避免对手术部位和周围结构组织的判断失误,手术刀运动状态根据预先规划的运动轨迹进行,避免出现错刀或断刀等情况,让手术过程更加安全高效。
附图说明
41.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
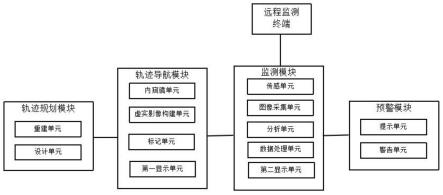
42.图1为本发明实施例1的一种手术刀实时监测系统结构示意图;
43.图2为本发明实施例2的一种手术刀实时监测方法流程示意图。
具体实施方式
44.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
45.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
46.实施例1
47.如图1所示,本实施例中提供一种手术刀实时监测系统,包括,轨迹规划模块、轨迹导航模块、监测模块与预警模块;
48.轨迹规划模块用于规划手术刀的运动轨迹,获得规划轨迹;轨迹导航模块用于构建导航影像,并根据规划轨迹引导手术刀的运动;监测模块用于实时监测手术刀的运动状态,并将规划轨迹与运动状态进行对比分析;预警模块用于根据规划轨迹进行预先提示,以及根据分析结果进行预警。
49.进一步地,轨迹规划模块包括重建单元与设计单元;
50.重建单元对患者的mri与ct数据进行高清重建,构建患者个体化的三维解剖图像;设计单元根据三维解剖图像进行3d打印,根据打印结果设计手术方案中手术刀的规划轨迹。
51.在本实施例中,根据不同患者的不同症状部位进行个体化的三维解剖图像,通过专家会诊在3d打印结果上,预先设计出手术方案中手术刀的规划轨迹。
52.进一步地,轨迹导航模块包括内窥镜单元、虚实影像构建单元、标记单元与第一显示单元;内窥镜单元用于采集手术部位图像;虚实影像构建单元用于根据手术部位图像,构建虚实结合的导航影像;标记单元用于将规划轨迹在导航影像中标记出来;第一显示单元用于显示导航影像与规划轨迹。
53.在本实施例中,内窥镜单元还包括机器人承载基座、控制柜、机械臂、活动夹爪以及内窥镜;机器人承载基座用于安放机械臂;控制柜用于控制机械臂的移动;机械臂用于变换手术器械的空间位置与姿态,并连接有活动夹爪;活动夹爪用于固定内窥镜并移送至指定位置;内窥镜包括手术通道与内窥镜相机;内窥镜相机用于采集手术部位图像,获得内窥镜图像。
54.进一步地,虚实影像构建单元包括光学追踪器、光学定位仪与导航仪;
55.光学追踪器通过刚性支架固定安放在内窥镜单元上与患者身体上;用于反射红外光线;光学定位仪用于发出红外光线,并接收光学追踪器反射的红外光线,根据接收的红外光线获取患者身体与内窥镜单元的实时相对位置,导航仪用于根据患者的mri与ct数据、手术部位图像与实时相对位置,构建出虚实结合的导航影像。
56.在本实施例中,光学跟踪器为能够反射红外光线的反光球,用于反射光学定位仪发出的红外光线,一支架安放在患者身体上固定位置,供图像引导空间影像作参考,另一支架安装于内窥镜上,用来定位内窥镜在导航空间中的相应位置,光学定位仪接收光学跟踪器反射的红外光线,对光学跟踪器进行三维空间定位,光学跟踪器安装在刚性支架上,刚性支架以固定方式装配在手术器械和患者身体上。通过对不同坐标系使用刚体变换,得到手术器械和患者的粗略空间位置,之后对患者和手术器械的空间位置进行矫正和配准。导航仪提供实时空间定位,导航影像配准,内窥镜影像和图像引导空间影像融合中的计算资源。显示器用于显示内窥镜影像和图像引导空间影像的融合结果。
57.其中,在导航仪主机中,对患者身体的术中超声影像与术前mri与ct数据进行非刚性配准,获取患者身体的原始图像引导空间,原始图像引导空间包含患者身体的实时位置;对内窥镜的实时位置进行矫正;基于矫正后的内窥镜的位置与患者身体的实时位置,获得内窥镜与原始图像引导空间影像的相对位置关系;基于相对位置关系在内窥镜成像平面上对原始图像引导空间进行体绘制,获取图像引导空间影像。
58.进一步地,监测模块包括图像采集单元、传感单元、数据处理单元、分析单元和第二显示单元;
59.图像采集单元,用于实时获取手术刀的运动状态;
60.传感单元,用于获取手术刀施加在手术部位的力信息;
61.数据处理单元,用于对力信息进行处理,获取接触曲线;
62.第二显示单元,用于显示手术刀的运动状态和接触曲线;
63.分析单元用于判断运动状态和接触曲线是否满足规划轨迹,获取分析结果。
64.在本实施例中,传感单元包括信号放大器和触觉传感器;其中,触觉传感器包括场效应管;通过场效应管对手术部位的电场或电子进行检测,并将检测到的信号通过信号放大器进行放大,在手术刀接触到人体皮肤表面时,人体的电子会扩展场效应管的电子流道,所以在手术刀的输出端可以检测到电压变化,手术刀与人体皮肤表面接触的程度可以通过电信号反馈至外接计算机,通过外接计算机显示出接触程度曲线,进而可以检测到手术刀的攻丝、滑动以及切割运动,即通过电场或电子的变化实现对手术刀运动轨迹的实时监测,控制手术刀操作更加精准。
65.进一步地,预警模块包括预先提示单元与警告单元;
66.预先提示单元根据规划轨迹进行预先提示,预先提示为提示手术刀的即将应进行的动作状态;
67.警告单元用于根据分析结果发出错误警报。
68.进一步地,手术刀实时监测系统还包括远程监测终端;
69.远程监测终端将导航影像、规划轨迹与手术刀的实时运动状态在远程显示,用于远程监测与会诊交流。
70.实施例2
71.如图2所示,本实施例中提供一种手术刀实时监测方法,包括:
72.基于患者的mri与ct数据规划手术刀的运动轨迹,获得规划轨迹;
73.构建虚实结合的导航影像,将所述规划轨迹在所述导航影像中进行标记,并根据所述规划轨迹引导手术刀的运动;
74.实时监测手术刀的运动状态,并将所述规划轨迹与所述运动状态进行对比分析;
75.根据所述规划轨迹进行手术刀运动状态的预先提示,以及根据分析结果进行预警。
76.进一步地,一种手术刀实时监测方法还包括:
77.将所述导航影像、规划轨迹与手术刀的实时运动状态在远程显示,完成远程监测与会诊交流。
78.以上,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1