骨骼相对运动测量方法、关节旋转轴获取及定位方法
本发明涉及生物力学和外科学领域,具体涉及一种骨骼相对运动测量方法、关节旋转轴获取及定位方法。
背景技术:
1、全膝关节置换术(total knee arthroplast,tka)是目前实施数量非常大的骨科手术,主要用来治疗终末期膝关节骨性关节炎(osteoarthritis,oa)的病人。但根据调查显示,目前有8-25%的病人对手术效果不满意。为了改善手术效果,研究者们近二十多年进行了许多研究,膝关节旋转轴被认为是一个影响手术效果的重要因素,tka人工关节的设计和术中安装都要建立在正确定位膝关节旋转轴的基础上。
2、为了定位这个轴线,则需要先给膝关节旋转轴做出明确的定义。但如果直接套用旋转轴的传统定义到膝关节的应用场景,会产生如下问题:对于严格的枢轴运动,旋转轴的定义是清晰的,因为严格的枢轴运动存在一个绝对稳定的旋转轴;但是膝关节运动是以枢轴运动(屈伸运动)为主,同时合并有内外旋和内外翻的多种运动,这些运动同时还存在个体差异。换句话说,膝关节的运动是复杂的,不存在一个绝对稳定的旋转轴,所以不能直接把传统的旋转轴定义套用到膝关节上。当前有许多论文以膝关节旋转轴为研究对象,但没有研究者清晰描述过膝关节旋转轴的精确定义,进而导致在进行手术时,人工关节的设计及安装都存在无法准确适配个体的问题。
技术实现思路
1、为了解决目前关节旋转轴不能准确定位,导致关节置换手术效果不佳的技术问题,本发明提供一种骨骼相对运动测量方法、关节旋转轴获取及定位方法。
2、为了实现上述技术目的,本发明的技术方案是,
3、一种骨骼相对运动测量方法,包括以下步骤:
4、步骤一,基于磁共振成像即mri对运动前的骨骼进行第一次成像,得到第一图像;
5、步骤二,基于mri对运动后的骨骼进行第二次成像得到第二图像,然后旋转第二图像,使第二图像中的骨骼成像的朝向与第一图像中相同;其中用于判断朝向是否相同的依据是对比特征区域框架是否一致,所述的特征区域框架是基于骨骼内的多个特征区域构成,特征区域为骨骼的骨皮质下血管;
6、步骤三,测量旋转后和旋转前的第二图像的角度差,以及旋转后的第二图像与第一图像之间的位移距离,并基于角度差和位移距离来计算骨骼的相对运动值。
7、所述的一种基于mri技术的骨骼相对运动测量方法,所述的步骤二中,所述的特征区域,是紧贴在骨皮质下方,与骨皮质相交的血管所在区域。
8、所述的一种基于mri技术的骨骼相对运动测量方法,所述的步骤二中,特征区域框架包括至少两个处于mri图像中不同层面的特征区域,且各个特征区域之间的间隔不小于预设的mri层数;每个特征区域的大小不超过预设的尺寸限制。
9、一种个体最稳定旋转轴获取方法,包括以下步骤:
10、步骤1,基于前述的方法,或者以影像学技术为基础测量关节运动的传统测量方法,获取个体目标关节的骨骼在不同弯曲角度下的6自由度相对运动值;
11、步骤2,将骨骼以预设网格大小进行三维网格划分,并在每个网格中任取一点,形成候选点集;
12、步骤3,以步骤1中获得的相对运动值为依据定量评估步骤2中候选点集合里每个点的稳定性,选出最稳定的预设数量的点作为最稳定点群;
13、步骤4,用最小二乘法或梯度下降法找到一条最靠近最稳定点群中所有点的直线,即为该个体目标关节的个体最稳定旋转轴。
14、所述的方法,所述的步骤3中,点的稳定性基于以下方法评估:
15、以待评估稳定性的点作为目标点,根据关节在各个不同角度下的骨骼相对运动值,得出目标点在每个角度下的位置坐标;然后计算这些位置坐标的平均坐标,再测量平均坐标到每个位置坐标的距离,然后计算这些距离的均方差或算术平均值;均方差或算数平均值越大,目标点的稳定性越差,反之则越好。
16、所述的方法,所述的步骤3中,最稳定点群中点的预设数量是通过以下方式确定:
17、当步骤2中所有网格所拼合的总网格为标准体时,则选取稳定性最好的预设比例的点作为最稳定点群;其中标准体是指能容纳关节靠近人体头部一侧的骨骼的远端全部骨骼的最小正方体;当总网格的体积与标准体不同时,则按照总网格与标准体的体积反比例来调整点的选取预设比例。
18、一种适用于膝关节和肘关节的人群平均最稳定旋转轴的获取方法,包括以下步骤:
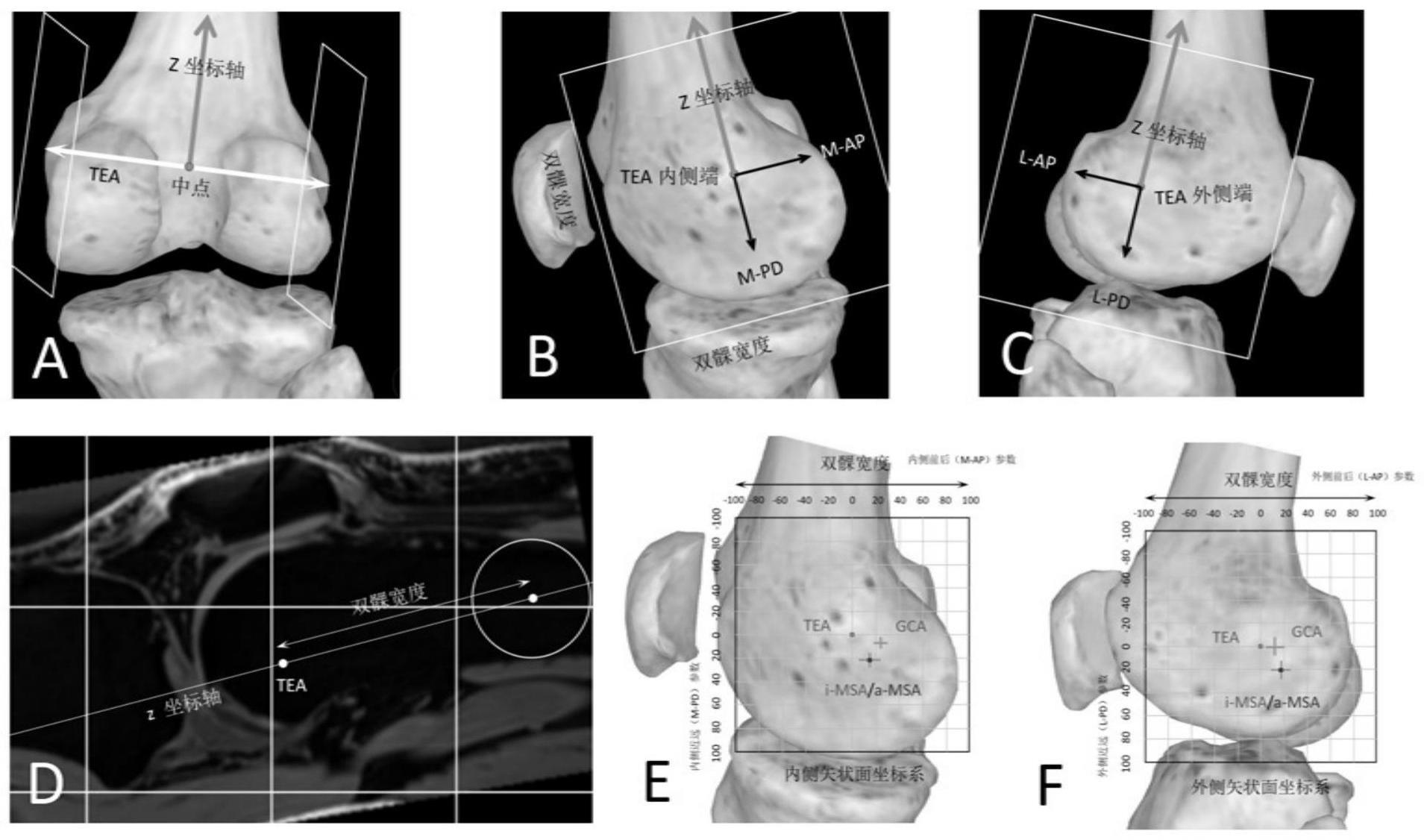
19、步骤1),获取多个目标的受试关节的通髁轴即tea;
20、步骤2),基于前述的方法,获取步骤1中所有受试关节的个体最稳定旋转轴;
21、步骤3),确定关节所在立体空间坐标系:以tea所在直线为x轴;然后在tea近侧以标准长度的水平高度画出股骨/肱骨骨干髓腔内接圆,从圆心向x轴做一条垂线作为z轴;y轴方向同时垂直于x轴和z轴。
22、步骤4),确定内外侧矢状面坐标系:以垂直于x轴且经过股骨/肱骨內髁的平面为内侧矢状面,垂直于x轴且经过股骨/肱骨外髁的平面为外侧矢状面;在内侧矢状面上,以股骨/肱骨內髁为原点,y轴和z轴为坐标轴方向建立二维坐标系,称为内侧矢状面坐标系;在外侧矢状面上,以股骨/肱骨外髁为原点,y轴和z轴为坐标轴方向建立二维坐标系,称为外侧矢状面坐标系;
23、步骤5),每个受试关节的个体最稳定旋转轴与内侧矢状面有一个交点,交点在内侧矢状面坐标系中的前后位置即y轴坐标用参数内侧-前后m-ap表示,近远位置即z轴坐标用参数内侧-近远m-pd表示;个体最稳定旋转轴与外侧矢状面交点的前后位置即y轴上的位置用参数外侧-前后l-ap表示,近远位置即z轴上的位置用参数外侧-近远l-pd表示;四个参数各自取人群平均值,即为个体最稳定旋转轴与tea的人群平均相对位置关系,从而获取人群平均最稳定旋转轴。
24、所述的方法,所述的步骤3中,标准长度是tea内外髁距离×a,其中a为系数,取值为0.44~1.0。
25、一种膝关节旋转轴在真实世界定位方法,包括以下步骤:
26、步骤①,对目标受试膝关节,首先拍摄膝关节ct或mri,并基于前述的方法获取个体最稳定旋转轴、或者基于前述的的方法获取人群平均最稳定旋转轴、或者以传统方法获得旋转轴来作为目标旋转轴,然后在水平面/冠状面上定位目标旋转轴在此方向上的投影;
27、步骤②,找到影像学图像上的后髁轴即pca,然后测量目标旋转轴的水平面投影与骨皮质的内外侧两个交点与pca的距离,分别作为内侧前-后距离,外侧前-后距离;
28、步骤③,找到影像学图像上的股骨内侧和外侧的骨骼远端边界的公共切线作为下髁轴,然后测量目标旋转轴的冠状面投影与骨皮质的内外侧两个交点与下髁轴的距离,分别作为内侧近-远距离和外侧近-远距离;
29、步骤④,找到真实膝关节的pca,并基于步骤②中获得的内侧前-后距离,找到pca前方该距离对应的平行线,经过该平行线与膝关节内侧骨骼表面的交点,做一条近远方向的直线作为内侧的近远走行直线;同时基于步骤②中获得的外侧前-后距离找到pca前方该距离对应的平行线,经过该平行线与膝关节外侧骨骼表面的交点,做一条近远方向的直线作为外侧的近远走行直线;然后找到真实膝关节的下髁轴,并根据步骤③中获得的内侧近-远距离和外侧近-远距离,找到下髁轴上方这两个距离分别对应的平行线,然后分别经过这两条平行线与膝关节内侧和外侧骨骼表面的交点,做两条前后方向的直线作为内侧和外侧的前后走行直线;则膝关节内侧的远近走行直线和前后走行直线的交点即为目标旋转轴穿出膝关节内侧骨皮质的位置;膝关节外侧的远近走行直线和前后走行直线即为目标旋转轴穿出膝关节外侧骨皮质的位置;以这两个交点作为膝关节假体旋转轴的安装位置。
30、本发明的技术效果在于,本发明能够有效提高膝关节置换手术假体的旋转稳定性,从而改善手术效果。通过本发明来在术前测量a-msa或i-msa来确定旋转轴的位置,然后在术中将假体旋转轴安装到该位置,能够有效降低膝关节置换病人的不满意率。且本发明易于实施,适于大规模推广。
- 还没有人留言评论。精彩留言会获得点赞!