一种柔性手术器械及其器械驱动装置的制作方法
1.本发明涉及医疗器械领域技术领域,具体涉及一种柔性手术器械及其器械驱动装置。
背景技术:
2.消化系统、泌尿系统、呼吸系统等自然腔道疾病是常见重大慢性病,如胃癌、食管癌、大肠癌、膀胱癌、肺癌等疾病发病率和死亡率高,严重危害人体健康。以软式内镜配合相关手术器械进行诊断和治疗已成为主流治疗手段,具有创伤小、出血量小,并发症发生率低的特点。
3.众所周知,与常规大切口手术不同的是,经人体腔道介入手术的操作空间常常狭小,通常需要依赖柔性器械进行诊疗操作。现有的柔性器械种类丰富,例如但不限于夹钳类、电凝电切类、注射类、引导类等,能够满足狭窄环境下的不同操作需求。目前的手术器械大多基于人工操作设计,为满足腔道介入需求,现有柔性器械设计为柔性细长类器械,使用过程中需要医护人员配合、操作复杂;另外,柔性细长的器械容易与污物接触,存在污染风险,且在器械收回过程中也会存在交叉感染的可能。
4.有鉴于此,亟待针对柔性手术器械进行优化设计,以克服上述缺陷。
技术实现要素:
5.本技术的目的在于提供一种柔性手术器械及其器械驱动装置,通过优化配置能够提供带动柔性器械进行输送操作的复合动作,可满足柔性器械的功能需要。
6.本技术实施例提供的一种器械驱动装置,用于提供驱动力至柔性器械,包括第一驱动部件、输出轴和接口部件:其中,所述接口部件用于传递所述驱动力至柔性器械;所述第一驱动部件包括可输出旋转驱动力的输出端;所述输出轴与所述第一驱动部件的输出端传动连接,所述接口部件设置在所述输出轴上;所述第一驱动部件的输出端与所述输出轴之间包括两个动力传递路径,并配置为可分别带动所述输出轴转动及轴向移动,以通过所述接口部件的驱动基板带动柔性器械进行输送操作。
7.可选地,所述第一驱动部件的输出端与所述输出轴之间设置有丝杆螺母传动机构和皮带轮传动机构,所述皮带轮传动机构构建形成带动所述输出轴转动的动力传递路径,所述丝杆螺母传动机构构建形成带动所述输出轴沿轴向移动的动力传递路径。
8.可选地,所述丝杆螺母传动机构配置为:其丝杆与第一驱动部件的输出端同轴固定,其螺母固定设置在连接件上,且所述输出轴与所述连接件枢接,且所述输出轴与所述连接件之间具有轴向限位;所述皮带轮传动机构配置为:其主动带轮固定在所述丝杆上,其从动带轮设置在所述输出轴上,所述从动带轮可带动所述输出轴转动,且所述输出轴可相对于所述从动带轮沿轴向移动。
9.可选地,所述从动带轮与所述输出轴之间套装设置有轴套,所述轴套的两侧端枢接于固定结构,所述从动带轮与所述轴套固定连接,所述输出轴的外表面具有沿轴向设置
的键,所述轴套的内表面具有与所述键相适配的键槽。
10.可选地,所述键和所述键槽分别为相适配的花键和花键槽。
11.可选地,所述轴套通过固定盘固定在所述器械驱动装置的罩壳上。
12.可选地,所述输出轴的轴端设置有推力轴承,所述连接件上固定设置有轴承固定座,所述轴承固定座与所述推力轴承形成所述轴向限位。
13.可选地,所述接口部件还包括套筒,所述驱动基板通过所述套筒固定设置在所述输出轴上。
14.可选地,还包括第二驱动部件和第三驱动部件,两者均包括可输出旋转驱动力的输出端;所述接口部件还包括第一主动传动盘和第二主动传动盘,所述第一主动传动盘与所述第二驱动部件的输出端传动连接,所述第二主动传动盘与所述第二驱动部件的输出端传动连接;所述驱动基板开设有第一贯通孔和第二贯通孔,所述第一贯通孔与所述第一主动传动盘相应设置,所述第二贯通孔与所述第二主动传动盘相应设置,以便相应主动传动盘通过贯通孔带动柔性器械进行执行器操作。
15.可选地,所述第一主动传动盘和所述第二主动传动盘分别固定在两个滑动支架上,每个所述滑动支架相对于相应固定设置的滑轨可轴向位移,且每个所述滑动支架与固定结构之间设置弹性复位件,所述弹性复位件配置为:在所述滑动支架朝向所述器械驱动装置位移时可产生形变,以提供复位作用力至相应的所述滑动支架。
16.可选地,所述第一主动传动盘和所述第二驱动部件通过第一法兰相连,所述第二主动传动盘和所述第三驱动部件通过第二法兰相连,所述第一法兰和所述第二法兰分别固定在相应的所述滑动支架上。
17.可选地,所述套筒外周设置导向套,所述导向套固定在所述器械驱动装置的罩壳上,所述套筒与所述导向套之间形成轴向移动适配副。
18.本技术实施例还提供一种柔性手术器械,包括柔性器械和可输出驱动力至所述柔性器械的器械驱动装置,所述器械驱动装置采用如前所述的器械驱动装置。
19.针对具有复合输送动作功能需要的柔性器械,本发明提供一种器械驱动装置,用于提供驱动力至柔性器械。具体地,其第一驱动部件的输出端与输出轴之间包括两个动力传递路径,并配置为可分别带动输出轴转动及轴向移动,以通过接口部件的驱动基板带动柔性器械进行输送操作。工作过程中,位于输出轴上的驱动基板可同步实现复合动作,换言之,在在旋转运动的同时沿轴向位移,复合动作包括正转外伸和反转内收两种情形,可满足柔性器械的输送动作功能需要。
20.在本发明的可选方案中,还包括第二驱动部件和第三驱动部件,两者均包括可输出旋转驱动力的输出端;相应地,接口部件还包括第一主动传动盘和第二主动传动盘,第一主动传动盘与第二驱动部件的输出端传动连接,可带动柔性器械进行执行器操作,例如但不限于驱动丝的牵拉等;第二主动传动盘与第二驱动部件的输出端传动连接,可带动柔性器械进行执行器操作,例如但不限于驱动丝的扭转等。结构设计合理、可靠,可进一步提高驱动装置的整体驱动能力。
21.在本发明的另一可选方案中,第一主动传动盘和第二主动传动盘分别固定在两个滑动支架上,每个滑动支架相对于相应固定设置的滑轨可轴向位移,且每个滑动支架与固定结构之间设置弹性复位件,所述弹性复位件配置为:在所述滑动支架朝向所述驱动装置
位移时可产生形变,以提供复位作用力至相应的所述滑动支架。这样,可匹配不同器械侧的轴向对接行程,可进一步提高该驱动装置的可适应性。
附图说明
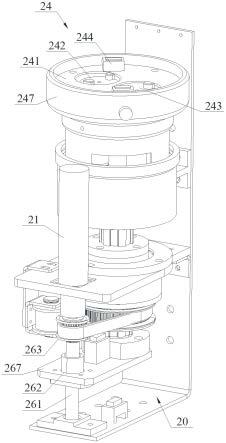
22.图1为本技术实施方式所述柔性操作器械的整体结构示意图;图2为本技术实施方式所述柔性器械的示意图;图3为图2中所示柔性器械的装配爆炸图;图4为图2中所示柔性器械局部剖切形成的示意图;图5为本技术实施方式提供的一种执行器单元的示意图;图6为图2的a-a剖视图;图7为本技术实施方式提供的传动单元的整体结构示意图;图8示出了本技术实施方式所述传动单元与器械储存器的装配关系示意图;图9为另一视角形成的传动单元与器械储存器的装配关系示意图;图10为本技术实施方式所述执行传动组件的装配关系示意图;图11为图6的ⅰ部放大示意图;图12为本技术实施方式所述旋转传动组件的装配关系示意图;图13为图6的ⅱ部放大示意图;图14为本技术实施方式中所述电源和信号源引入路径示意图;图15为本技术实施方式所述器械驱动装置的内部构成示意图;图16为图15中所示器械驱动装置侧的连接机构示意图图17为本技术实施方式所述驱动基板与器械储存器的组装关系示意图;图18为图16的b-b局部剖视图;图19为本技术实施方式中所述第一主动传动盘和第二主动传动盘的组装关系示意图;图20为本技术实施方式中所述传动基板与传动单元的组装关系示意图;图21为本技术实施方式中所述第一驱动件的传动关系示意图;图22为图15的轴向剖视图。
23.图中:柔性器械10、器械输送单元11、外壳111、器械出口1111、插口1112、器械储存器112、螺旋容纳槽1121、通过口1122、卡口1123、护管113、执行器单元12、驱动丝121、限位块1211、执行器122、套管123、传动单元13、执行传动组件131、第一驱动轴1311、第一端子1312、第四贯通孔13121、牵引件1313、安装槽13131、第一约束件1315、约束腔13151、第一内部通道13152、旋转传动组件132、旋转轴1321、安装孔13211、第二端子1322、锥齿轮组1323、第二驱动轴1324、第二约束件1325、第三贯通孔13251、第二内部通道13252、传动基板133、卡槽1331、第一被动传动盘134、第一凹部1341、第二被动传动盘135、第二凹部1351、对接单元14、电接口141、水接口142、引导管15、信号发生器161、信号接收器162、安装检测组件17;器械驱动装置20、第一驱动部件21、第二驱动部件22、第三驱动部件23、接口部件24、驱动基板241、第一贯通孔2411、第二贯通孔2412、第一主动传动盘242、第一凸部2421、第二主动传动盘243、第二凸部2431、卡扣244、勾头部2441、引导面2442、按钮245、复位弹簧
246、套筒247、遮挡段2471、穿装孔2472、连接套248、第一法兰251、第二法兰252、滑动支架253、滑轨254、复位件255、丝杆261、螺母262、主动带轮263、从动带轮264、输出轴265、键2651、第一轴套266、键槽2661、连接件267、轴承固定座268、推力轴承2681、轴承269、罩壳27、侧壁271、固定盘272、第二轴套273、导向套274。
具体实施方式
24.为了使本领域的技术人员更好地理解本发明的技术方案,下面结合附图和具体实施例对本发明作进一步的详细说明。
25.不失一般性,本实施方式提供一种柔性手术器械,能够合理解决较长细软器械操作复杂,不易收纳用容易污染的问题。请参见图1,该图为本技术实施方式所述柔性操作器械的整体结构示意图。
26.该柔性手术器械包括柔性器械10和器械驱动装置20,其中,柔性器械10中配置有用于诊疗和辅助诊疗的执行器单元12,器械驱动装置20可提供驱动力至柔性器械10,以实现柔性器械的输送操作和执行器的旋转或开闭等操作。
27.请一并参见图2和图3,其中,图2为本技术实施方式所述柔性器械的示意图,图3为图2中所示柔性器械10的装配爆炸图。
28.该柔性器械10包括器械输送单元11、内置于器械输送单元11中的执行器单元12和用于传递执行器运动驱动力的传动单元13。
29.其中,器械输送单元11包括外壳111和器械储存器112,在传动单元13的带动下,器械储存器112可相对于外壳111转动;组装完成后,外壳111保持相对固定的状态。
30.其中,执行器单元12的柔性本体(驱动丝121及套管123)缠绕在器械储存器112外周,且可经由外壳111侧壁开设的器械出口1111伸出;这里,器械出口1111外侧设置有护管113,该护管固定在外壳111上,以便伸出外壳111的执行器单元12保护稳定的姿态。随着器械储存器112的转动,执行器单元12的柔性本体通过器械出口1111连续输送;同理,器械储存器112反向运动时,则柔性本体可收回至外壳内并缠绕在器械储存器112上,实现执行器单元12的收回及收纳。具体来说,非使用状态下的外壳111和器械储存器112形成相对封闭的空间,用于柔性器械本体的收纳。
31.为了执行器单元12的柔性本体能够有序缠绕排布,器械储存器112的外周表面可设置有螺旋容纳槽1121,请一并参见图4,该图为图2中所示柔性器械局部剖切形成的示意图。收回至外壳内的执行器单元12的柔性本体,置于器械储存器112的螺旋容纳槽1121内,可避免出线乱或打结的情形。
32.在传动单元13的带动下,器械储存器112还可相对于外壳111轴向移动。也就是说,器械储存器112转动时同步轴向移动,这样,执行器单元12柔性本体脱离螺旋容纳槽1121的部位,能够在两个维度上保持与器械出口1111大致对中,收放操作得以顺畅执行。
33.在具体实现中,执行器单元12可以根据具体应用进行选择,例如但不限于,夹钳类、电凝电切类、网篮类、注射类、引导类、传感器类柔性器械等。其中,夹钳类柔性器械包括一个夹持自由度的组织夹取器和夹持旋转自由度的止血器;电凝电切类柔性器械包括一个用于组织电切电凝的夹持自由度和包含一个圈套器械的推拉自由度;网篮类柔性器械包括一个用于网篮的推出和收回的推送自由度;注射类柔性器械包括一个用于针头的推出和收
回的推送自由度;引导类用于同轴器械引导,不具备自由度;传感器类柔性器械可以包括图像传感器械、位置传感器械或者形状传感器械等。
34.基于执行器单元12的上述功能需要,可通过牵拉或扭转执行器单元12的驱动丝121近端实现。请参见图5,该图为本技术实施方式提供的一种执行器单元12的示意图。
35.具体地,通过牵拉驱动丝121可以使得位于位于远端的执行器122运动,例如但不限于包括执行器的开合以及执行器的推送;同理,通过扭转驱动丝121也可以实现位于远端的执行器122的旋转运动。
36.本文中所使用的方位词“近端”和“远端”,是以手术器械操作人员的视角定义的,也即,该驱动丝121的近操作人员的一端为“近端”,相对应地近患者的另一端为“远端”。应当理解,上述方位词的使用仅用于清楚描述技术方案,且对于本技术请求保护的柔性手术器械并未构成实质性的限制。
37.对于执行器单元12的驱动丝121的牵拉和扭转,基于器械驱动装置20侧输出的驱动力实现,具体通过传动单元13的执行传动组件131和旋转传动组件132传递驱动力。请一并参见图2、图3、图6和图7,其中,图6为图2的a-a剖视图,图7为本技术实施方式提供的传动单元的整体结构示意图。
38.如图3所示,该传动单元13包括传动基板133,执行传动组件131和旋转传动组件132设置在该传动基板133上,并可通过传动基板133与器械输送单元11的器械储存器112组装固定。请一并参见图8和图9,两图分别从不同视角示出了传动单元与器械储存器的装配关系。整体结构较为紧凑,且组装工艺性较好。
39.如图6所示,执行传动组件131包括第一端子1312、牵引件1313和第一驱动轴1311。
40.其中,牵引件1313与第一驱动轴1311连接,第一驱动轴1311插装设置在传动基板133上,以在器械驱动装置20的驱动力作用下转动,并带动牵引件1313绕其转动中心摆动。
41.其中,第一端子1312固定在牵引件1313上,并可在牵引件1313转动时随动。驱动丝121的近端与第一端子1312相连接,并配置为:驱动丝121可在第一端子1312的带动下沿预定轨迹推出或收回,且驱动丝121可相对于第一端子1312旋转。可以理解的是,该牵引件1313摆动幅度范围内,需要满足第一端子1312的牵拉行程要求,也即位于远端的执行器122所需的推出或收回位移量。
42.请一并参见图10和图11,其中,图10为本技术实施方式所述执行传动组件的装配关系示意图,图11为图6的ⅰ部放大示意图。
43.第一端子1312嵌装在牵引件1313中,具体地,牵引件1313的外周表面开设有适配于第一端子1312的安装槽13131,该外周表面为圆弧面。在其他具体实现中,根据实际产品设计要求,牵引件1313的外周表面非局限于图中所示的圆弧状;同时,该固定端子也可完全设置在牵引件内部,而非局限于嵌装在牵引件1313的外周表面上(图中未示出)。
44.本实施方案中,驱动丝121穿装在第一端子1312的第四贯通孔13121中,且驱动丝121本体上设置有两个限位块1211,分别位于第四贯通孔13121两端侧,该限位块1211的尺寸大于第四贯通孔13121的尺寸。牵引件1313正反向转动时,基于第一端子1312与相应侧限位块1211之间的限位关系,可实现驱动丝121的推出和收回,满足术中的具体操作要求。
45.同时,驱动丝121与第一端子1312的第四贯通孔13121之间具有径向间隙,也即驱动丝121相对于固定端子具备转动自由度,当驱动丝在旋转传动组件132的带动下转动时,
可相对于第四贯通孔13121转动,与固定端子侧无动作干涉。
46.其中,传动基板133上固定设置有第一约束件1315,该第一约束件1315上开设有约束腔13151,驱动丝121置于约束腔13151中。在第一端子1312的带动下,驱动丝121可在该约束腔13151构建的预定轨迹上推出或收回。
47.为了充分利用外壳内部空间,第一约束件1315及其上开设的约束腔13151大致呈弧状。同时,该第一约束件1315包括顺次连接的导向段c和保持段d,如图6所示,导向段c具有与牵引件1313的圆弧状外周表面适配的圆弧状内壁,该导向段c内壁上的约束腔13151为开放腔道,该保持段d上的约束腔13151为封闭腔道;这样,一方面可通过圆弧状内壁建立牵引件1313的位移导向,同时,由导向段c上的开放腔道及保持段d上的封闭腔道共同建立引导驱动丝121的预定轨迹。
48.当然,在其他具体实现中,也可以采用第一端子1312a、相啮合的锥齿轮组1311a和丝杆1313a,实现驱动丝121推出或收回。请参见图12,该图为本技术实施方式提供的另一种执行传动组件的示意图。为了清楚示明与图6所描述实施方案的区别和联系,相同功能构成或结构以同一标记进行示意。
49.如图12所示,该锥齿轮组1311a的主动齿轮可在第一驱动轴1311带动下,带动被动齿轮转动,丝杆1313a与被动齿轮同轴转动;与此同时,第一端子1312a一端夹持固定驱动丝121的近端,第一端子1312a的另一端配置有与丝杆1313a适配的螺母(图中未示出),这里,螺母固定在第一端子1312a上,并可随丝杆1313a的转动沿其轴向移动,从而通过第一端子1312a带动驱动丝121实现推出或收回。应当理解,图12所描述的实施方案同样可配置用于构建预定轨迹的约束腔。
50.再如图3和图6所示,本实施方案中旋转传动组件132包括旋转轴1321、第二端子1322、锥齿轮组1323和第二驱动轴1324。
51.其中,锥齿轮组1323的主动轮与第二驱动轴1324连接,第二驱动轴1324插装设置在传动基板133上,以在器械驱动装置20的驱动力作用下转动,并通过锥齿轮组1323带动旋转轴1321绕其转动中心转动。
52.其中,第二端子1322设置在该旋转轴1321上,驱动丝121由第二端子1322固定,并可在旋转轴1321转动时随动。并配置为:第二端子1322可在旋转轴1321的带动下转动,且第二端子1322可沿驱动丝121的牵拉方向相对于旋转轴1321滑动。这里,该第二端子1322的滑动行程,同样需要满足第一端子1312的牵拉行程要求。
53.请一并参见图12和图13,其中,图12为本技术实施方式所述旋转传动组件的装配关系示意图,该图为自第二端子1322所在位置处径向剖切后形成的视图,图13为图6的ⅱ部放大示意图。
54.第二端子1322嵌装在旋转轴1321中,具体地,旋转轴1321的中部开设有安装孔13211,驱动丝121可经由该安装孔13211延伸至第一约束件的约束腔中。本实施方案中,与驱动丝121固定连接的第二端子1322插装在该安装孔13211中,且两者具有相适配的矩形截面。这样,当旋转轴1321转动时,第二端子1322可同步转动带动驱动丝121扭转;同时,第二端子1322相对于旋转轴1321具有滑动自由度,也即,第二端子1322可相对于旋转轴1321轴向运动,当驱动丝在执行传动组件131的带动下牵拉时,可相对于安装孔13211转动,与旋转轴侧无动作干涉。
55.在其他具体实现中,第二端子1322与该安装孔13211的截面形式也可以采用其他结构,例如但不限于,其他多边形或者具有周向限位平面的形态,只要能够满足第二端子在安装孔内滑动且可随旋转轴同步转动的功能需要,均在本技术请求保护的范围内。
56.其中,传动基板133上固定设置有第二约束件1325,再如图6和图7所示,沿旋转轴1321的轴向,该第二约束件1325一端与第一约束件1315保持段d的端部相对设置,且第二约束件1325与第一约束件1315分别提供轴端支撑,旋转轴1321的两侧轴端得以获得可靠的枢接适配关系,满足相对转动的功能需要。
57.这里,第二约束件1325上开设有第三贯通孔13251,相对应地,器械输送单元11的器械储存器112上开设有通过口1122,且该通过口1122斜向开设,以便执行器单元12柔性本体延伸过渡至其外表面的螺旋容纳槽1121中。第三贯通孔13251的孔径可以与执行器单元12的柔性本体套管123尺寸适配,以可靠固定套管123的管端。
58.另外,本实施方式提供的柔性器械10还包括对接单元14,用于外部装置连接,例如但不限于实现电源和信号源连接以及水路连接。请参见图2和图4,外壳111的顶端配置有与内部连通的电接口141和水接口142,外壳111固定设置有轴向延伸形成的引导管15。该电接口141可将电源和信号源引入器械内部,水接口142可将外部水源引入器械内部,通过外壳111中部的引导管15进入执行器单元12,进而连接至远端执行器。
59.对于电源和信号源的引入,请一并参见图7和图14,其中,图14为电源和信号源引入路径示意图。
60.第一约束件1315上开设有第一内部通道13152,第一内部通道13152与旋转轴的安装孔13211连通。电接口141引入的缆线,经由引导管下行,并通过第一约束件1315的第一内部通道13152进入旋转轴的安装孔13211内,并通过执行器单元12的套管123连接至远端执行器。例如但不限于,用于实现远端执行器的供电,以及与远端执行器之间的信号交互传输等。
61.第二约束件1325上还开设有第二内部通道13252,第二内部通道13252与第三贯通孔13251连通。水接口142引入的水路接管,同样可经由引导管下行,并通过第二约束件1325的第二内部通道13252进入第三贯通孔13251内,并通过执行器单元12的套管123连接至远端执行器。例如但不限于,用于实现冲洗液的灌注等。
62.为了便于整机快速组装,本实施方案中,柔性器械10与器械驱动装置20之间设置有可拆卸连接机构,具体包括器械储存器112和传动单元13(执行传动组件131、旋转传动组件132)与器械驱动装置20之间的可拆卸连接,在快速组装操作的基础上,同时满足传递相应驱动力的功能需要。
63.请参见图15和图16,其中,图15为本技术实施方式所述器械驱动装置20的内部构成示意图,图16为图15中所示器械驱动装置侧的连接机构示意图。
64.如图所示,在器械驱动装置20的顶部配置有输出动力的接口部件24,其中,驱动基板241作为输出第一驱动部件21的驱动力的接口连接件,用于传递动力至器械储存器112;第一主动传动盘242作为输出第二驱动部件22的驱动力的接口连接件,以传递动力至第一驱动轴1311,用于牵拉驱动丝;第二主动传动盘243作为输出第三驱动部件23的驱动力的接口连接件,以传递动力至第二驱动轴1324,用于扭转驱动丝。
65.请一并参见图8、图9和图17,其中,图17示出了驱动基板与器械储存器112的组装
关系示意图。
66.驱动基板241与传动基板133相对设置,驱动基板241上设置有卡扣244,传动基板133上相应设置有卡槽1331,组装后,该卡扣244置于卡槽1331中,形成周向转动限位副。当驱动基板241在第一驱动部件21驱动下转动时,可基于该周向转动限位副带动传动基板133同步转动,进而带动与传动基板133固定的器械储存器112转动,以输送执行器单元12。
67.本实施方案中,相适配的卡扣244和卡槽1331设置为两组,且采用对称布置方式,受力较为均衡。可以理解的是,在其他具体实现中,也可以配置为周向间隔设置的其他复数组。
68.进一步地,卡扣244可相对于驱动基板241沿径向移动,也即卡扣244还可在卡槽1331滑动,该卡扣244具有自本体外伸形成的勾头部2441,外端;相应地,器械储存器112的侧壁上设置有与该勾头部2441适配的卡口1123。这样,卡扣244处于外伸工作位时,该勾头部2441可插装在卡口1123中,限制器械储存器112脱离。
69.由此,带动器械储存器112转动时,可通过相适配的卡扣244和卡槽1331同步带动轴向伸出或收回。在其他具体实现中,还可以通过其他结构形式达成同步轴向移动的功能需要。
70.为了提高可操作性,卡扣244的外侧设置有按钮245,卡扣244的内侧设置有复位弹簧246,该复位弹簧246可以预压缩设置在卡扣244与驱动基板241之间,以便卡扣244可靠地保持在外伸工作位。请一并参见图18,该图为图16的b-b局部剖视图。
71.拆卸时,操作者施加作用力于按钮245,卡扣244沿着卡槽1331向内滑动,复位弹簧246进一步形变,勾头部2441自卡口1123脱出,即可将柔性器械10拆下。
72.其中,勾头部2441外伸端的顶部具有引导面2442,该引导面2442向下延伸形成。实际组装时,器械储存器112的下沿轴向压抵勾头部2441的引导面2442,并产生作用于卡扣244的径向向内的分力,卡扣244在该作用力下向内滑动;与此同时,复位弹簧246受压进一步形变,随着器械储存器112轴向移动,至其上的卡口1123与勾头部2441对中时,复位弹簧246释放弹性变形能,推动勾头部2441伸入卡口1123内,快速完成两者之间的组装操作。
73.可以理解的是,在其他具体实现中,该复位弹簧还可以采用其他结构形式实现,例如但不限于采用基于橡胶材料特性制成的复位件,或者采用弹片结构的复位件。
74.进一步地,为了避免卡合结构外露可能产生的影响,本实施方案中,驱动基板241的外周设置有套筒247,该套筒247包括轴向向上延伸的遮挡段2471。驱动基板241及其上的卡扣244可内置于遮挡段2471围合形成的空腔内;同时,遮挡段2471上开设有两个穿装孔2472,分别与两个按钮245径向相对设置,以便按钮245的推杆通过该穿装孔2472与卡扣244本体固定连接。在有效遮挡卡合结构的基础上,同时可兼顾按钮的可操作性。
75.这里,驱动基板241通过套筒247和连接套248与第一驱动部件21传动连接。在具体实现中,套筒247和连接套248可以为一体式结构。当然在其他具体实现中,驱动基板241也可直接与第一驱动部件21传动连接,或者还可以通过套筒247与第一驱动部件21传动连接。
76.另外,在柔性器械10与器械驱动装置20之间还可以配置电子识别组件,用于系统识别当前接入的器械类型。再如图16所示,该电子识别组件可以包括配置在柔性器械一侧的信号发生器161和配置在器械驱动装置一侧的信号接收器162,具体地,信号发生器161可设置在器械储存器112的外周表面,相应地信号接收器162可设置在套筒247的内壁(图中未
示出),采用射频信号识别。
77.此外,为了实时监测安装状态,可以在器械驱动装置一侧配置安装检测组件17。再如图15和图16所示,该安装检测组件17可以采用微动开关,并设置在卡扣244的顶面。当柔性器械安装至驱动装置上时,柔性器械通过挤压微动开关产生一个信号,从而实现安装状态检测。
78.需要说明的是,电子识别组件和安装检测组件可以采用其他器件形式,具体可根据实际产品设计要求进行选定,而非局限于图中所示的器件类型及配置位置。
79.请一并参见图9、图16、图17、图19和图20,其中,图19示出了第一主动传动盘242和第二主动传动盘243的组装关系示意图,图20进一步示出了传动基板与传动单元的组装关系示意图。
80.本实施方案中,设置有两组传动连接的主动传动盘和被动传动盘,其中,传动基板133的底部设置有第一被动传动盘134和第二被动传动盘135。第一被动传动盘134固定连接在第一驱动轴1311的轴端,并与第一主动传动盘242适配连接;第二被动传动盘135固定连接在第二驱动轴1324的轴端,并与第二主动传动盘243适配连接。
81.相应地,驱动基板241开设有第一贯通孔2411和第二贯通孔2412,以便第一主动传动盘242和第二主动传动盘243分别通过两个贯通孔与相适配的被动传动盘适配。同时,第二驱动部件22固定设置在第一法兰251,且其输出轴通过第一法兰251与第一主动传动盘242相连,第三驱动部件23固定设置在第二法兰252,且其输出轴通过第二法兰252与第二主动传动盘243相连,整体上沿轴向依次设置,可减小径向尺寸的空间占用。
82.为了进一步匹配不同对接侧轴向对接行程,本实施方案的可拆卸连接机构进一步具有轴向可适应性。该第一法兰251和第二法兰252可分别固定在相应的滑动支架253上,两个滑动支架253可分别相对于固定设置的滑轨254轴向位移。这里,为了简化图示,图19中仅示出了与第一法兰251相适配的滑动支架253和滑轨254。也就是说,滑动支架253具有可相对于滑轨254轴向相对位移的自由度,以适应性调整轴向相对位置。
83.相应地,在每个滑动支架253的底部可设置弹性复位件255,以提供复位作用力至滑动支架253,使得相应的主动、被动传动盘之间建立可靠的连接。可以理解的是,滑轨254为相对固定的结构件,具体可根据内部空间配置相应的固定连接方式,例如但不限于图中所示的固定设置在连接套248上。
84.如图9所示,第一被动传动盘134上具有第一凹部1341,第二被动传动盘135上具有第二凹部1351;如图16和图17所示,第一主动传动盘242上具有第一凸部2421,第二主动传动盘243上具有第二凸部2431,可分别与相应被动传动盘上的凹部适配构建形成周向限位副。这样,第二驱动部件22和第三驱动部件23分别启动时,可分别上述相适配主、被动传动盘将动力传递至传动单元的驱动轴,用于实现执行器单元的牵拉和扭转操作。
85.本实施方案中,相适配的主动传动盘与被动传动盘的外径尺寸大致相同,凹部自被动传动盘的外周表面径向内凹形成,凸部自主动传动盘的顶面轴向延伸形成,组装后,主动传动盘上的凸部与被动传动盘上的凹部嵌合。具有结构紧凑、连接可靠性高的特点。在其他具体实现中,每个传动路径上,相适配的凸、凹部的配置数量可以根据产品总体设计要求进行确定,而非局限于图中所示的两组。
86.另外,本实施方案的器械储存器112转动及轴向位移,由第一驱动部件21提供驱动
力,并分别通过两个动力传递路径实现。请一并参见图15、图21和图22,其中,图21示出了第一驱动件的传动关系示意图,图22为图15的轴向剖视图,具体剖切位置通过第一驱动部件及输出轴的中心线。
87.该第一驱动部件21的输出端与丝杆261同轴固定,并以丝杆261作为两个动力传递路径的基础传动构件。如图所示,丝杆261上间隔设置有主动带轮263和螺母262。
88.其中,主动带轮263固定设置在丝杆261上,并通过皮带将转动驱动力传递至从动带轮264,从动带轮264设置在输出轴265上。具体地,从动带轮264固定设置在第一轴套266上,该第一轴套266通过轴承269枢接在固定结构上,输出轴265外表面上具有轴向设置的键2651,该第一轴套266内表面上具有与该键相适配的键槽2661。基于带轮传动机构,在第一轴套266的带动下,输出轴265可同步转动,且输出轴265与第一轴套266之间可轴向相对移动。
89.其中,螺母262与丝杆261螺纹适配,并通过连接件267与输出轴265相连。该螺母262固定设置在连接件267的一端,输出轴265枢接在连接件267的另一端枢接,且两者之间具有轴向限位。具体地,输出轴265的轴端设置有推力轴承2681,连接件267上固定设置有轴承固定座268,且轴承固定座268与推力轴承2681形成该轴向限位。基于丝杆与螺母的适配关系,可带动输出轴265沿轴向往复移动。
90.由此,第一驱动部件21输出端输出的驱动力,通过两个动力传递路径同步带动输出轴265转动及轴向移动,并通过固定在输出轴265上连接套248带动驱动基板241转动及轴向移动。该复合运动以旋转运动为柔性器械输送的主运动,轴向移动为保障执行器单元12柔性本体与器械储存器112通过口1122保持对准的辅助运动。
91.需要说明的是,用于与第一轴套266枢接适配的固定结构,以及用于外壳111保持相对固定的相关结构,可以采用不同方式实现。本实施方案中,将上述固定结构集成设置在器械驱动装置20的罩壳27上,该罩壳27的侧壁271向上延伸至柔性器械10的外壳111旁侧。
92.对于柔性器械10外壳111的固定,请一并参见图1和图15。外壳111的外周表面设置插口1112,并可通过插口1112套装在侧壁271上,基于不同的组装尺寸利用螺纹紧固件将外壳111固定在侧壁271上。
93.对于与第一轴套266枢接适配的固定盘272,如图15、图22所示,该固定盘272固定于侧壁271上,以此固定形成用于安装轴承269的第二轴套273。当然,在其他具体实现中,该第二轴套273与固定盘272可采用一体式结构。
94.进一步的,为了提高轴向移动的稳定性,可以在连接套248的外周配置导向套274,该导向套274固定于侧壁271上,连接套248与导向套274之间形成轴向移动适配副,在连接套248的轴向移动行程范围内提供导向支撑,确保相关结构具有良好的作动性能。
95.本文所使用的序数词“第一”和“第二”,仅用于在描述技术方案中相同功能的构成或结构。可以理解的是,上述序数词“第一”和“第二”的使用,对本技术请求保护的技术方案未构成理解上的限制。
96.以上仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1