用于计划导航的方法和装置与流程
1.本发明涉及一种针对患者的中空器官中的医疗用器具计划远程控制的导航的方法,能够借助机器人系统以机器人技术或者机器人辅助地实施并且借助成像系统图像监测所述导航,并且本发明还涉及一种用于实施这种方法的装置。
背景技术:
2.人体血管系统中或通过人体血管系统的介入医疗程序需要将诸如装置、仪器或导丝之类的医疗用器具手动地导入血管系统中并且导引至待治疗的目标区域。通常使用至少一种成像方式、例如x射线成像系统作为辅助措施,该成像方式使得操作人员能够根据图像数据实时地监控和了解治疗的进展、例如器具的位置。对于许多程序而言,除了在手术期间实时拍摄的图像数据之外,还需要访问术前图像数据并且在手术中将其考虑在内。
3.传统地,通常由助手辅助的操作人员直接站在患者的支承台旁以实施(计划的)程序。该医疗措施的一种扩展设计是在操作人员和患者的手之间连接机器人系统,其具有的优点是操作人员不再需要直接地站在患者的支承台旁,而是能够远程控制地进行器具的机动(旋转运动、向前运动和向后运动)。这种机器人系统原则上例如由文献ep 3406291 b1已知,借助机器人系统能够机器人辅助地实现器具、例如导管和/或导丝在患者的空腔器官中的(半)自动运动。为此,为操作人员提供相应的用户接口用于远程控制的运动。此外有利的是,拍摄和传输成像设备的x射线图像并将它们显示给操作人员以获得必要的视觉反馈。医疗用器具的这种机器人导引的优点尤其在于操作人员的舒适工作位置、能够完全地离开患者台上的辐射区域,并且由此通过避免辐射而达到更高的工作安全性。
技术实现要素:
4.本发明所要解决的技术问题在于,提供一种方法,所述方法确保了远程控制的、机器人辅助的、借助成像系统图像监测的导航程序对于患者是特别安全的;此外,本发明所要解决的技术问题还在于,提供一种适用于实施所述方法的x射线设备。
5.所述技术问题按照本发明通过一种针对患者的中空器官中的医疗用器具计划远程控制的导航的方法解决,能够借助机器人系统以机器人技术或者机器人辅助地实施并且借助成像系统图像监测所述导航。所述技术问题按照本发明还通过一种用于实施所述方法的总系统解决。
6.在按照本发明的用于针对患者的中空器官中的医疗用器具计划远程控制的导航的方法中,能够借助机器人系统以机器人技术或者机器人辅助地实施并且借助成像系统图像监测所述导航,其中,所述机器人系统具有驱动系统、机器人控制单元和至少一个远离机器人控制单元布置的输入单元,并且其中,尤其在所述机器人控制单元和所述输入单元之间存在至少一个数据传输连接,所述方法包括以下步骤:提供所计划的穿过中空器官的器具的具有至少一个导航步骤的导航程序的数据,借助评估系统在导航程序的可行性程度方面分析所提供的数据,其中,基于与经验数据的比较和/或基于理论模型和/或借助基于学
习的算法进行所述分析,并且在所述输出单元上输出评估结果。以此方式使得在通过导航实施介入手术时,操作人员能够以简单的方式地监测导航的所有相关步骤。操作人员因此能够由评估结果识别是否可能出现并且可能在哪个步骤出现影响程序可行性的问题并且在必要时采取行动或修改或推迟手术。这在通过远程入口进行介入和在使用(半)自动地实施程序的不同方面的机器人系统时也是特别重要的。总体上通过所述方法显著地改善了手术的质量和安全性。
7.导航程序例如可以是针对中空器官中的医疗用器具的提前计划的具有一个或多个导航步骤的导航。所述计划例如可以借助已知的计划工具实现或者从存储器调用。
8.可行性程度表示所计划的导航程序的绝对的或相对的可行性的量值。在此可以考虑不同的可行性。因此,可行性程度可以包含粗略的分类(可实施/不可实施)、分成多个级别的分类或非常精确的说明(例如百分比概率)。可行性程度还可以取决于相应的操作人员或者所使用的设备。
9.与经验数据的比较例如可以采用具有大量先前实施和/或收集的数据的存储器或表格,将这些数据与当前数据进行比较。所述当前数据例如可以与操作人员相关或者无关。备选或附加地,可以实施一个或多个理论模型计算以获得可行性程度。也可以将基于学习的算法、例如提前通过多个先前实施和/或收集的数据训练的算法用于确定可行性程度。在此也可以考虑与操作人员的相关性。
10.根据本发明的一种设计方案,所述输出包含所述导航程序可执行的概率。以此方式使操作人员能够快速并且以简单的方式识别,是否可靠地确保了程序的可行性并且采取相应的措施。
11.此外,如果例如分析得出导航程序不能执行或者至少具有较低的或者中等的概率,则也可以输出光学的、声学的或者触觉的警报。
12.根据本发明的另一设计方案,所述数据包含待使用的数据传输连接的至少一个特性、尤其数据传输速率(例如带宽),并且所述分析至少考虑到所述数据传输连接的特性。这尤其对于通过远程的(远离机器人控制单元布置的)输入单元连接的操作人员来说是非常有帮助的,以便检查和确保治疗的可靠性并且由此提高患者的安全性。
13.根据本发明的另一设计方案,为了尽可能精确地分析可行性,所述数据具有计划的导航程序的类型和/或所述导航程序的步骤顺序和/或患者数据、尤其体重和/或年龄和/或身高,和/或中空器官的数据、尤其所述中空器官的结构和/或解剖学结构,和/或器具数据和/或待施用的药物和/或待使用的造影剂和/或设备数据和/或x射线参数和/或特定用户的数据(例如,哪个用户正在实施治疗等)。通过这种方式,可以在多个甚至所有细节中监测导航程序,这进一步提高了可靠性并且由此提高了患者的安全性。此外,也可以考虑可以包括在分析中的其他变量。
14.根据本发明的另一设计方案,输出用于修改计划的导航程序的至少一个建议,其中,通过修改适配的导航程序而具有更高的或至少相同的可行性的概率。操作人员以此方式得到所计划的程序的备选建议,该建议在最好的情况下能够更可靠地实施,并且随即能够做出关于实施的决定。操作人员自身不必费事地考虑如何修改程序,而是会很快得到适宜的建议。操作人员例如可以随即选择或拒绝该建议。
15.尤其还可以输出多个具有不同于计划的导航程序的导航程序的建议,附带基于这
些导航程序的各个相应的可行性程度,从而使操作人员能够将它们相互比较并选择对于其合适的一种。操作人员例如可以从存在的建议中进行选择,或者也可以拒绝所述建议。由此提高了介入的灵活性。
16.在有利的方式中,至少一个修改建议具有关于至少一个导航步骤、关于所使用的器具、关于导航路径、关于造影剂、关于药物和/或关于x射线参数的修改。
17.为了能够将结果用于将来的导航程序,以适宜的方式将分析和/或评估结果存储在数据库或表格、尤其查找表中,以便在后续的过程中使用。
18.根据本发明的另一种设计方案,如果可行性程度达到或者超过预设的阈值,则自动地触发用于导航程序的开始信号。由此可以直接启动被识别为特别可靠的导航程序。在使用概率时,所述阈值例如可以是90%、95%或100%。阈值例如可以提前由操作人员选择和设置。
19.本发明还包括一种用于实施前述的方法的总系统,所述总系统具有机器人系统,其具有至少一个机器人控制单元、机器人辅助的驱动系统和远离机器人控制单元布置的输入单元,所述机器人控制单元设计用于通过所述驱动系统控制患者的中空器官中的医疗用器具的机器人辅助的导航,其中,在所述机器人控制单元和所述输入单元之间存在至少一个数据传输连接,并且所述总系统还具有用于对导航进行图像监测的成像系统、尤其x射线系统,所述成像系统具有用于拍摄投影图像的辐射源和图像探测器,所述总系统还具有用于控制成像系统的系统控制单元,并且所述总系统还具有评估单元,用于在导航程序的可行性程度方面分析所提供的导航计划数据,并且所述总系统还具有设计用于输出评估结果的输出单元,其中,所述评估单元设计为,基于与经验数据的比较和/或基于理论模型和/或借助基于学习的方法进行分析。在有利的方式中,所提供的数据包括所述数据传输连接的至少一个特性,并且其中,在分析时至少考虑到所述数据传输连接的特性。此外,所述机器人系统和成像系统之间也可以存在至少一个第二数据传输连接,并且在分析时也可以考虑第二数据传输连接的特性。
附图说明
20.本发明以及其他有利的设计方式在以下借助附图中示意性示出的实施例详细阐述,但本发明并不局限于所述实施例。在附图中:
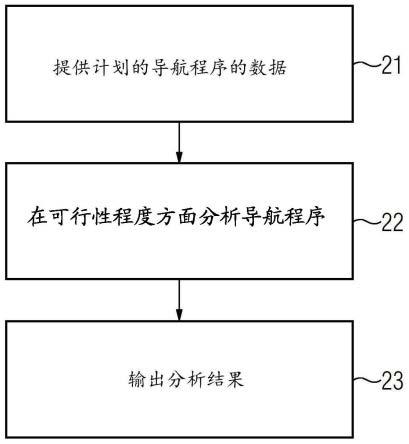
21.图1示出按照本发明的方法的步骤的视图;
22.图2示出按照本发明的方法的其它步骤的视图;
23.图3示出按照本发明的方法的其它步骤的视图;和
24.图4示出用于实施所述方法的总系统的视图。
具体实施方式
25.图1至图3示出按照本发明的用于针对患者的中空器官中的医疗用器具计划远程控制的导航的方法,能够借助机器人系统以机器人技术或者机器人辅助地实施并且借助成像系统图像监测所述导航。机器人系统原则上例如由文献ep 3406291 b1已知,借助所述机器人系统能够机器人辅助地实现患者的中空器官中的器具的自动运动。
26.如图4所示的用于实施所述方法的总系统1具有x射线系统10形式的、用于拍摄x射
线图像的成像系统和机器人系统2。x射线系统10例如可以由设计为移动式或者固定安装的c形臂x射线设备构成。所述x射线系统10具有c形臂13,x射线源12和x射线探测器11布置在所述c形臂上。设有控制单元14、例如具有处理器的计算单元以进行控制。此外,存在用于分析数据和信息的评估单元16。机器人系统2具有至少一个机器人控制单元8和机器人辅助的驱动系统7。机器人控制单元8设计用于产生控制信号,该控制信号用于控制男性患者或者女性患者15的中空器官中的医疗用器具的机器人辅助的导航。为了操作机器人系统2设有远离地(远程地)布置的操作单元17,所述操作单元通过(无线的)数据传输连接18与机器人控制单元8连接。“远离地布置”在此理解为,操作单元17至少位于与检查室不同的房间中、尤其其它建筑或者甚至(例如其它城市或者其它国家的)其它医院中。这种远离地布置的操作装置使得专科医生能够在不同地点进行手术,而不必前往那里,从而有效地实现了更多的手术。
27.总系统1还可以具有用于存储不同数据、图像数据和信息的存储单元31。所述系统还可以具有未示出的用于从外部的存储装置或者数据库调用医疗数据的通信装置。此外,总系统1配备有用于显示图像数据和其它数据的显示单元18。显示单元30优选能够由操作人员查看,即例如也是远程地布置的。也可以附加或备选地存在总系统控制单元。
28.图1示出了基本的方法。在第一步骤21中,提供针对穿过中空器官的器具的已计划的具有至少一个导航步骤的导航程序的数据。导航程序的计划例如可以借助已知的计划工具产生。这种计划例如可以基于2d或者3d的x射线图像(ct、血管造影)或者其它成像方法产生。计划的程序的数据可以直接由计划工具、存储器(例如存储单元31)或者通过其它数据传输连接从云调取或者提供。除了待使用的数据传输连接18的特性(例如
……
)、尤其是数据传输速率或者数据传输带宽之外,数据例如也可以包括计划的导航程序的类型、导航步骤的数量和类型和/或导航程序的步骤顺序,此外可以包括患者数据、尤其患者的体重和/或年龄和/或身高,和/或中空器官的数据、尤其中空器官的结构和/或解剖学结构和/或器具数据(例如应当使用哪个器具/设备以及有关其形状、大小、刚度等的数据)和/或待施用的药物和/或待使用的造影剂和/或设备数据和/或x射线参数。所述数据在此尤其被传递给评估系统(例如评估单元16)。
29.在第二步骤22中尤其由评估系统(例如评估单元16)分析所提供的关于导航程序的可行性程度的数据。
30.可行性程度表示计划的导航程序的绝对的或相对的可行性的量值,即该程序是否可以不受限制地、有限制地执行或根本不可能执行。在此可以考虑可行性的不同分类。因此,可行性程度可以包含简单的分类(可执行/不可执行)、分成多个级别的分类或非常精确的划分(例如百分比概率)。可行性程度还可以取决于相应的操作人员或者所使用的设备。
31.在此可以基于与经验数据的比较和/或基于理论模型和/或借助基于学习的算法进行分析。
32.与经验数据的比较例如可以采用具有大量先前实施和/或收集的数据的存储器(存储单元31)或表格(查找表),将当前数据与所述数据进行比较。所述当前数据例如可以与操作人员相关或者无关。备选或附加地可以实施一个或多个理论的模型计算以获得可行性程度。也可以将基于学习的算法、例如提前通过多个先前实施和/或收集的数据训练的算法用于确定可行性程度。在此也可以考虑与操作人员的相关性。
33.接着在第三步骤23中在输出单元上、即例如在显示单元(显示器、平板电脑等)上输出评估结果。评估结果的输出的类型可以具有不同的变型。因此例如可以规定输出简单的颜色上的分类、即例如将红色用于不能实施并且将绿色用于能实施,或者具有多于两种颜色(例如信号灯:红、黄、绿)的其它分类等。还可以输出描述可行性的图形表示、刻度表示或文本/数字。例如还可以输出可以实施该过程的概率。此外,如果例如分析得出导航程序不能执行或者至少具有低的或者中等的概率,则也可以输出光学的、声学的或者触觉的警报。通过所述输出使操作人员能够快速并且以简单的方式识别是否可靠地确保了程序的可行性并且采取相应的措施。也可以输出建议、例如是否应当启动程序。
34.如图2所示,除了输出评估结果之外,可以在第四步骤24中输出(在至少一个参数中)修改的导航程序的建议。评估系统为此同样可以确定这种修改的导航程序的可行性程度,并且可以将该可行性程度与建议的修改或建议的修改的程序一起显示。优选输出用于修改计划的导航程序的至少一个建议,其中,通过修改适配的导航程序具有更好的可行性程度或者更高的或至少相同的可行性概率。所述修改例如可以涉及待使用的数据传输连接的性质、计划的导航程序的类型、导航步骤的数量和类型和/或导航程序的步骤顺序、器具数据(例如,哪个器具、形状、大小、刚度等)或待施用的药物或待使用的造影剂或设备数据或x射线参数或多个这种修改。无法被影响的参数(例如患者数据)无法被修改并且相应地不被包含在修改建议中。例如在数据传输连接的性质方面,可以显示备选的数据连接、备选的时间或其它修改。如果无法影响数据传输连接的性质,则可以修改其它参数,所述其它参数与数据传输连接共同产生更安全的或更好地协调的具有更好的可行性程度或更高的可行性概率的程序。也可以规定,输出具有由评估单元计算的尽可能高或者尽可能好的可行性的修改建议。导航程序例如可以在可行性程度方面针对可修改的参数被优化。在确定修改的导航程序和相应的可行性程度时,可以如所述地使用模型、训练的算法或者经验数据库。
35.此外,不仅可以输出一个建议,而且可以输出两个或者多个建议,其中,优选与每个建议一起输出基于可行性程度的数据。通过这种方式,从业者可以明确哪个建议的可行性最高或成功实施的概率最高。例如可以规定,操作人员为导航程序选择具有最高的成功概率或至少具有高的成功概率的建议。
36.图3示出另一种方法,其中使用了针对可行性程度的阈值。针对可行性程度的阈值或针对程序的可行性概率的阈值可以是预设的或可由用户选择的。在分析评估过程中,在第五步骤25中由评估单元确定(例如形式为概率的)可行性程度是否超过预设的阈值。如果可行性程度超过了预设的阈值,则接着自动地在第六步骤26中产生用于自动或者半自动的导航程序的开始信号。如果可行性程度未超过预设的阈值,则在第四步中输出一个或多个具有可行性程度超过阈值的导航程序的修改建议。
37.在所述方法之后,可以将分析和/或评估结果存放或存储在数据库或表格、尤其查找表中,以在后续的过程中使用。
38.通过所述方法使得能够在通过导航程序介入手术时,操作人员能够以简单的方式监测导航的所有相关步骤。操作人员因此可以由评估单元的评估结果识别是否可能出现和/或可能在哪个步骤出现影响程序的可行性的问题并且在必要时采取行动或修改或推迟手术。这在通过远程入口进行介入和在使用(半)自动执行程序的不同方面的机器人系统时
也是特别重要的。总体上通过所述方法显著地改善了手术的质量和安全性。
39.所述方法包括基于关于计划的程序的相关信息对计划的机器人技术的或机器人辅助的手术的可行性的先验分析。所述程序例如可以是血管内程序。与之相关地可以为操作人员提供建议。在通过远程入口、即由远离地布置的操作单元进行的介入,并且在所述介入中机器人系统(半)自动地执行程序的不同方面,尤其对于上述介入,所述方法使连接的操作人员能够控制所有相关步骤并且由此提高整个系统的安全性。
40.为了尽可能精确地分析可行性,可以为评估系统或评估单元提供关于计划的程序、患者、尤其患者的数字孪生和关于所使用的设备、例如设备的刚性或用途的信息。这些信息或各个组成部分也可以存储在数据库中并且由此用作其它程序的比较标准,或者在其它程序的分析中被使用或者被考虑在内。此外,对于远程控制的导航程序,数据传输连接的可供使用的质量的可能性、例如数据传输带宽被包含在分析和随后向操作人员的建议中。尤其是针对可能的延迟时间还可以显示附加的可能的安全的治疗选项。
41.最后,对从业者的建议可以基于数学模型、统计学调查或经过训练的函数。操作人员的决定和对程序的分析、尤其是(半)自动的分析或对程序成果的分析接着同样可以存储在数据库中或用于完善评估系统。此外能够为操作人员建议例如针对成像或者设备的备选方案,以便由此提高安全的可行性概率。
42.患者的中空器官32例如理解为血管(例如动脉或静脉或支气管)、血管系统的区段或患者的整个血管系统。
43.本发明可以通过以下方式简短汇总:针对特别安全的导航程序规定了一种方法,所述方法用于计划患者的中空器官中的医疗用器具的远程控制的导航,能够借助机器人系统以机器人技术或者机器人辅助地实施并且借助成像系统图像监测所述导航,其中,所述机器人系统具有驱动系统、机器人控制单元和至少一个远离所述机器人控制单元布置的输入单元,并且其中,尤其在所述机器人控制单元和所述输入单元之间存在至少一个数据传输连接,所述方法包括以下步骤:提供通过中空器官的器具的所计划的具有至少一个导航步骤的导航程序的数据、借助评估系统在导航程序的可行性程度方面分析所提供的数据,其中,所述分析基于与经验数据的比较和/或基于理论模型和/或借助基于学习的算法实现,并且在输出单元上输出评估结果。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1