一种三维动作感知器件及其制备方法
1.本发明属于智能可穿戴传感技术领域,尤其涉及一种三维动作感知器件及其制备方法。
背景技术:
2.人体的三维动作信息在健康医疗、人机交互与多自由度机械接口等方面具有重要的应用价值,而精准追踪人体三维复杂运动一直是一个巨大挑战。目前主流的人体动作追踪方式主要有以下三种:图像/视频追踪,该方案是传统机器学习中的一种,完全基于摄像头,通过机器学习的方式实现,但是该方案存在严重的遮挡问题,即物体对摄像头画面的遮挡会严重影响识别结果,且环境的因素也会带来极大的影响,倘若物体背景的纹理并不分明,则识别的效果并不会很好,此外还受到场地限制;惯性测量,该方案通过加速度计、陀螺仪、磁力计等获得人体关键节点的相关参数来重构人体动作,但受环境中的电磁场影响较大,倘若环境中有较大的电磁干扰,则系统会出现识别的错误,并且刚性测量单元显著降低了器件的适配性;力学感知,该方案通过获取人体关键节点的应力/应变信息来推测人体的动作,与人体的适形融合能力高,抗电磁干扰能力强,在随时随地获取人体动作信息方面表现出巨大的潜力。然而,当前的力学感知器件仅能实现单一维度应力/应变的检测,人体关节种类繁多,动作方向、幅度与姿态各异,很难实现人体多维运动的精细感知。因此,亟待发展面向人体的动作感知器件,实现人体复杂三维动作的随时随地的精细感知。
3.人体的三维动作感知实质是对人体多轴关节处复杂应变、应力状态的矢量检测与叠加。人体任意空间复杂运动作用到感知器件上表现为不规则的三维力矢量,任意三维力矢量可沿三个正交轴分解为规则的分力矢量,对应到人体上实际上就是要实现平面内两个应变以及法向应力的检测。针对以上需求,需要研制一种集成式的三维动作感知器件,三维动作感知器件包含法向应力感知单元与平面应变矢量感知单元,分别用于法向压力与平面内两个轴应变的检测,通过对三个分力矢量的选择性检测与矢量叠加,即可实现空间任意三维力矢量的测量,并进一步用于重构人体的三维动作。
技术实现要素:
4.本发明的目的在于提出一种三维动作感知器件及其制备方法,通过模量异质结构的设计,使得法向应力感知单元能够独立于平面拉伸应变的干扰准确检测法向压力;基于各向异性的多层序构法,实现了平面应变矢量传感器独立于法相压力的干扰实现平面应变的大小与方向的检测。
5.为实现上述目的,本发明提供了一种三维动作感知器件,包括:
6.法向应力感知单元和应变矢量感知单元,
7.所述法向应力感知单元用于独立于平面拉伸应变的干扰准确检测法向压力;
8.所述应变矢量感知单元用于独立于法相压力的干扰实现平面应变的矢量检测;
9.所述法向应力感知单元和所述应变矢量感知单元自上而下依次垂直叠加放置为
三维动作感知器件。
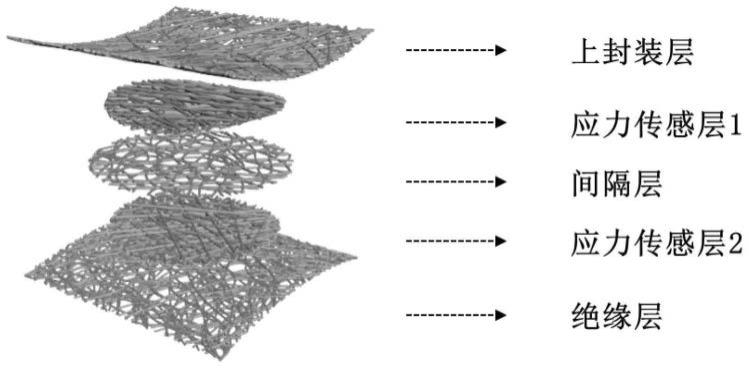
10.可选的,所述法向应力感知单元包括:按照自上而下的顺序依次叠加上封装层、第一应力传感层、间隔层、第二应力传感层和应力绝缘层。
11.可选的,所述第一应力传感层与所述第二应力传感层的厚度均为100-200μm,所述第一应力传感层与所述第二应力传感层的拉伸模量均为30-50mpa,所述上封装层与所述应力绝缘层的厚度均为40-60μm,所述间隔层厚度为20-30μm,上封装层、间隔层与绝缘层的拉伸模量均为0.5-1mpa。
12.可选的,所述应变矢量感知单元包括:按照自上而下的顺序依次叠加第一应变传感层、应变绝缘层、第二应变传感层和下封装层。
13.可选的,所述应变绝缘层与所述下封装层的厚度均为40-60μm,所述第一应变传感层与所述第二应变传感层的厚度均为20-30μm,所述第一应变传感层与所述第二应变传感层采用正交叠层排列。
14.可选的,所述法向应力感知单元在0-100%的拉伸应变范围内探测0-100kpa的法向压力,且所述法向应力感知单元的应变敏感度小于3%,所述拉伸应变的方向为平面内任意方向的单轴、双轴或多轴拉伸应变中的一种。
15.可选的,所述应变矢量感知单元在0-100kpa的法向压力范围内进行平面拉伸应变大小与方向的检测,应变量的检测范围为0-100%,且所述应变矢量感知单元的的压力敏感度小于2%。
16.为实现上述目的,本发明还提供了一种三维动作感知器件的制备方法,其特征在于,包括以下步骤:
17.制备封装层材料、应力传感层基底材料、间隔层材料、绝缘层材料、应变传感层基底材料;
18.将所述应力传感层基底材料与所述应变传感层基底材料浸泡于纳米导电材料的均匀分散液中,制备三维动作感知器件的应力传感层与应变传感层;
19.按照设定的形状与尺寸,采用分步热压成型工艺制备三维动作感知器件。
20.可选的,封装层材料、应力传感层基底材料、间隔层材料、绝缘层材料、应变传感层基底材料包括:聚氨酯pu、环氧树脂epoxy、聚二甲基硅氧烷pdms、硅橡胶等有机高分子材料,所述封装层材料、应力传感层基底材料、间隔层材料、绝缘层材料、应变传感层基底材料的分散液溶剂为二甲基甲酰胺、四氢呋喃、丙酮的任一种或两种及以上组合,所述封装层材料、应力传感层基底材料、间隔层材料、绝缘层材料、应变传感层基底材料的分散液浓度为15%wt-25%wt。
21.可选的,所述纳米导电材料包括:碳纳米管、石墨烯、碳纤维、二维层状过渡金属碳化物或碳氮化物、金属纳米线与纳米颗粒,分散溶剂为无水乙醇、去离子水的任意一种,所述低维导电材料的分散液浓度为0.1%wt-5%wt。
22.可选的,制备封装层材料、应力传感层基底材料、间隔层材料、绝缘层材料、应变传感层基底材料具体包括:采用静电纺丝工艺制备,所述封装层材料、绝缘层材料的静电纺丝工艺参数包括:静电纺丝电压为18-22kv,给料量为0.4-0.6ml/h,接收装置与泰勒锥之间的距离为18cm-25cm,接收装置的转速为0-300rpm,静电纺时间为5-7h;所述间隔层材料的静电纺丝工艺参数包括:静电纺丝电压为18-22kv,给料量为0.2-0.4ml/h,接收装置与泰勒锥
之间的距离为18cm-25cm,接收装置的转速为0-300rpm,静电纺时间为3-5h;所述应力传感层基底材料的静电纺丝工艺参数包括:静电纺丝电压为18-22kv,给料量为0.4-0.6ml/h,接收装置与泰勒锥之间的距离为18cm-25cm,接收装置的转速为600-800rpm,静电纺时间为15-20h;所述应变传感层基底材料的静电纺丝工艺参数包括:静电纺丝电压为18-22kv,给料量为0.4-0.6ml/h,接收装置与泰勒锥之间的距离为18cm-25cm,接收装置的转速为2000-3000rpm,静电纺时间为8-10h。
23.可选的,制备封装层材料、应力传感层基底材料、间隔层材料、绝缘层材料、应变传感层基底材料还包括:上封装层和下封装层、第一应力传感层和第二应力传感层、间隔层、绝缘层、应变绝缘层和应力绝缘层、第一应变传感层和第二应变传感层;所述分步热压成型工艺具体包括:第一步热压成型,分别将上封装层与第一应力传感层、第二应力传感层与绝缘层自上而下排列,实现上封装层与第一应力传感层、第二应力传感层与绝缘层的热压成型,其中热压温度为40-60℃,加载压力为6-10mpa,加载时间为20-40s;第二步热压成型,将第一应变传感层、应变绝缘层、第二应变传感层与下封装层自上而下叠层排列,实现应变矢量感知单元的热压成型,其中热压温度为40-60℃,加载压力为6-10mpa,加载时间为20-40s;第三步热压成型,将第一步成型的上封装层与第一应力传感层、间隔层、第一步成型的应力传感层2与绝缘层以及应变矢量感知单元自上而下叠层排列后,采用模板热压成型工艺实现三维动作感知器件的最终成型,其中热压温度为40-60℃,加载压力为6-10mpa,加载时间为40-80s。
24.可选的,按照设定的形状与尺寸,具体包括:
25.在法向应力感知单元中,所述上封装层与应力绝缘层尺寸均为4cm*4cm,第一应力传感层与第二应力传感层的半径均为0.5cm,间隔层的半径为0.6cm;在应变矢量感知单元中,所述第一应变传感层与第二应变传感层的尺寸为0.5cm*5cm,应变绝缘层的半径为0.5cm,下封装层尺寸为4cm*4cm。
26.可选的,所述三维动作感知器件可共形穿戴于皮肤表面,通过对关节处法向应力、平面应变的选择性检测与矢量叠加,即可实现对人体多轴关节运动的精细感知,并进一步用于重构人体动作,在多自由度的人机交互界面、骨科疾病如脊柱侧凸等疾病的筛查、诊疗于康复上具有广泛的应用前景。
27.本发明技术效果:本发明公开了一种三维动作感知器件及其制备方法,通过模量异质结构的设计,使得法向应力感知单元能够独立于平面拉伸应变的干扰准确检测法向压力;基于各向异性的多层序构法,实现了平面应变矢量传感器独立于法相压力的干扰实现平面应变的大小与方向的检测。本发明发展了一种三维动作感知器件的构筑策略,三维动作感知器件通过对关节处法向应力、平面应变的选择性检测与矢量叠加,即可实现对人体多轴关节运动的精细感知,并进一步用于重构人体动作。三维动作感知器件的法向压力探测范围为0-100kpa,平面拉伸应变探测范围为0-100%,且兼容多种传感原理。该三维动作感知器件便于制备,成本低廉,在未来多自由度的人机交互界面、骨科疾病如脊柱侧凸等疾病的筛查、诊疗与康复治疗上具有广泛的应用前景。
附图说明
28.构成本技术的一部分的附图用来提供对本技术的进一步理解,本技术的示意性实
施例及其说明用于解释本技术,并不构成对本技术的不当限定。在附图中:
29.图1为本发明实施例法向应力感知单元的结构示意图;
30.图2为本发明实施例应变矢量感知单元的结构示意图;
31.图3为本发明实施例三维动作感知器件的俯视图与左视图;
32.图4为本发明实施例三位动作感知器件的实物图;
33.图5为本发明实施例三维动作感知器件对不同刺激的响应信号。
具体实施方式
34.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本技术。
35.需要说明的是,在附图的流程图示出的步骤可以在诸如一组计算机可执行指令的计算机系统中执行,并且,虽然在流程图中示出了逻辑顺序,但是在某些情况下,可以以不同于此处的顺序执行所示出或描述的步骤。
36.法向应力感知单元的制备流程如下:
37.(1)称量2.0g聚氨酯、3.2g二甲基甲酰胺、4.8g四氢呋喃于玻璃瓶中,放入磁子搅拌溶解,溶解过程中转速为600rpm,加热温度为60℃,磁力搅拌时间为6小时,搅拌结束后将聚氨酯溶液静置2小时去除内部气泡。
38.(2)通过静电纺丝工艺制备法向应力感知单元的上封装层材料、应力传感层基底材料、间隔层材料与绝缘层材料,其中上封装层材料与绝缘层材料的静电纺丝参数包括:静电纺丝电压为20kv,给料量为0.5ml/h,接收装置与泰勒锥之间的距离为18cm,接收装置的转速为100rpm,静电纺时间为6h;应力传感层基底材料的静电纺丝参数包括:静电纺丝电压为20kv,给料量为0.5ml/h,接收装置与泰勒锥之间的距离为18cm,接收装置的转速为700rpm,静电纺时间为16h;间隔层材料的静电纺丝工艺参数包括:静电纺丝电压为20kv,给料量为0.3ml/h,接收装置与泰勒锥之间的距离为18cm,接收装置的转速为100rpm,静电纺时间为4h。静电纺丝结束后,将各材料从接收装置上剥离,并通过激光切割工艺切割成预设尺寸。
39.(3)将应力传感层基底材料浸泡于碳纳米管水性分散液中,超声2小时,随后将复合材料平铺于聚四氟乙烯板上,真空干燥6小时,设置干燥温度为50℃,剥离后得到应力传感层材料。
40.(4)采用分步热压成型工艺制备法向应力感知单元,第一步热压成型,分别将上封装层与应力传感层1、应力传感层2与绝缘层自上而下排列,实现上封装层与应力传感层1、应力传感层2与绝缘层的成型,其中热压温度为60℃,加载压力为8mpa,加载时间为30s;第二步热压成型,将第一步成型的上封装层与应力传感层1、间隔层、第一步成型的应力传感层2与绝缘层自上而下叠层排列后,采用模板热压成型工艺实现法向应力感知单元的最终成型,其中热压温度为60℃,加载压力为8mpa,加载时间为60s。
41.图1为法向应力感知单元的结构示意图,由于聚氨酯纤维取向以及纤维膜厚度的调控,法向应力感知单元的应力传感层与上封装层、绝缘层形成了模量异质结构,在拉伸过程中,法向应力感知单元的拉伸变形主要集中于非传感区域,而应力传感层并不会产生拉伸形变,因此,法向应力感知单元能够独立于拉伸应变的干扰准确检测法向的压力。
42.应变矢量感知单元的制备流程如下:
43.(1)称量2.0g聚氨酯、3.2g二甲基甲酰胺、4.8g四氢呋喃于玻璃瓶中,放入磁子搅拌溶解,溶解过程中转速为600rpm,加热温度为60℃,磁力搅拌时间为6小时,搅拌结束后将聚氨酯溶液静置2小时去除内部气泡。
44.(2)通过静电纺丝工艺制备应变矢量感知单元的应变传感层、应变绝缘层与下封装层材料,其中应变传感层基底材料的静电纺丝参数包括:静电纺丝电压为20kv,给料量为0.5ml/h,接收装置与泰勒锥之间的距离为18cm,接收装置的转速为2500rpm,静电纺时间为10h;应变绝缘层材料与下封装层材料的静电纺丝参数包括:静电纺丝电压为20kv,给料量为0.5ml/h,接收装置与泰勒锥之间的距离为18cm,接收装置的转速为100rpm,静电纺时间为6h。静电纺丝结束后,将各材料从接收装置上剥离,并通过激光切割工艺切割成预设尺寸。
45.(3)将应变传感层基底材料浸泡于碳纳米管水性分散液中,超声2小时,随后将复合材料平铺于聚四氟乙烯板上,真空干燥6小时,设置干燥温度为50℃,剥离后得到应力传感层材料。
46.(4)将应变传感层1、应变绝缘层、应变传感层2与下封装层自上而下叠层排列,其中应变传感层1与应变传感层2进一步呈正交叠层放置,随后采用热压工艺将应变矢量感知单元一次成型,其中热压温度为60℃,加载压力为8mpa,加载时间为30s。
47.图2为应变矢量感知单元的结构示意图,接收装置在高转速下可制备取向一致的聚氨酯纤维,基于有序结构聚氨酯纤维的应变传感层能够实现应变大小与方向的双响应,进一步通过应变传感层1与应变传感层2检测信号的耦合,可实现应变大小与方向的求解,并且,应变传感层为超薄结构,对法相压力的响应弱,因此,应变矢量感知单元同样能够独立于法相压力的干扰实现平面应变大小与方向的检测。
48.三维动作感知器件的制备流程如下:
49.(1)称量2.0g聚氨酯、3.2g二甲基甲酰胺、4.8g四氢呋喃于玻璃瓶中,放入磁子搅拌溶解,溶解过程中转速为600rpm,加热温度为60℃,磁力搅拌时间为6小时,搅拌结束后将聚氨酯溶液静置2小时去除内部气泡。
50.(2)通过静电纺丝工艺制备三维动作感知器件用材料,其中封装层材料、绝缘层材料的静电纺丝工艺参数包括:静电纺丝电压为20kv,给料量为0.5ml/h,接受装置与泰勒锥之间的距离为18cm,接收装置的转速为100rpm,静电纺时间为6h;间隔层材料的静电纺丝工艺参数包括:静电纺丝电压为20kv,给料量为0.3ml/h,接受装置与泰勒锥之间的距离为18,接收装置的转速为100rpm,静电纺时间为4h;应力传感层基底材料的静电纺丝工艺参数包括:静电纺丝电压为20kv,给料量为0.5ml/h,接受装置与泰勒锥之间的距离为18cm,接收装置的转速为700rpm,静电纺时间为16h;应变传感层基底材料的静电纺丝工艺参数包括:静电纺丝电压为20kv,给料量为0.5ml/h,接受装置与泰勒锥之间的距离为18cm,接收装置的转速为2500rpm,静电纺时间为10h。静电纺丝结束后,将各材料从接收装置上剥离,并通过激光切割工艺切割成预设尺寸。
51.(3)将应力传感层基底材料、应变传感层基底材料浸泡于碳纳米管水性分散液中,超声2小时,随后将复合材料平铺于聚四氟乙烯板上,真空干燥6小时,设置干燥温度为50℃,剥离后得到应力传感层材料、应变传感层材料。
52.(4)制备封装层材料、应力传感层基底材料、间隔层材料、绝缘层材料、应变传感层基底材料还包括:上封装层和下封装层、第一应力传感层和第二应力传感层、间隔层、绝缘层、应变绝缘层和应力绝缘层、第一应变传感层和第二应变传感层;所述分步热压成型工艺具体包括:第一步热压成型,分别将上封装层与第一应力传感层、第二应力传感层与绝缘层自上而下排列,实现上封装层与第一应力传感层、第二应力传感层与绝缘层的热压成型,其中热压温度为40-60℃,加载压力为6-10mpa,加载时间为20-40s;第二步热压成型,将第一应变传感层、应变绝缘层、第二应变传感层与下封装层自上而下叠层排列,实现应变矢量感知单元的热压成型,其中热压温度为40-60℃,加载压力为6-10mpa,加载时间为20-40s;第三步热压成型,将第一步成型的上封装层与第一应力传感层、间隔层、第一步成型的应力传感层2与绝缘层以及应变矢量感知单元自上而下叠层排列后,采用模板热压成型工艺实现三维动作感知器件的最终成型,其中热压温度为40-60℃,加载压力为6-10mpa,加载时间为40-80s。
53.图3为三维动作感知器件的结构示意图,三维动作感知器件包括从上到下依次排列的法向应力感知单元与应变矢量感知单元,并过热压工艺垂直叠层集成,图4为三维动作感知器件的实物图。三维动作感知器件在实际应用中,法向压力感知单元可以独立于平面拉伸应变的干扰准确检测法向压力,应变矢量感知单元同样可以独立于法相压力的干扰实现平面应变的矢量检测,如图5所示,当施加法向压力时,三维动作感知器件中只有法向应力感知单元对法向压力响应,当时加平面应变时,三维动作感知器件中只有应变矢量感知单元对施加的拉伸应变做出响应,当时加一个不规则的力时,法向应力感知单元与应变矢量感知单元会同时对不规则的力产生相应,通过对法向应力与平面应变的选择性检测与矢量叠加,即可实现空间任意三维力矢量的测量,并进一步获取人体的三维动作信息。
54.以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应该以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1