一种基于BP神经网络的康复锻炼模型的制作方法
一种基于bp神经网络的康复锻炼模型
技术领域
1.本发明涉及康复锻炼领域,特别涉及一种基于bp神经网络的康复锻炼模型。
背景技术:
2.退行性骨关节病又称骨关节炎、退行性关节炎、老年性关节炎、肥大性关节炎,是一种退行性病变,系由于增龄、肥胖、劳损、创伤、关节先天性异常、关节畸形等诸多因素引起的关节软骨退化损伤、关节边缘和软骨下骨反应性增生。本病多见于中老年人群,好发于负重关节及活动量较多的关节(如,颈椎、腰椎、膝关节、髋关节等)。过度负重或使用这些关节,均可促进退行性变化的发生。临床表现为缓慢发展的关节疼痛、压痛、僵硬、关节肿胀、活动受限和关节畸形等。
3.对于退行性膝关节病患者而言,康复是诊疗过程的关键环节之一。但医院和专业康复机构资源有限且成本相对较高,居家康复又难免动作不标准不到位的困扰。随着科技的进步,目前,市面上已经出现多种智能化的穿戴设备,如智能关节和智能行走辅助器等,可以辅助患者进行康复锻炼,但由于膝关节在锻炼和行走过程中,承受人体的重量,也容易造成其出现损伤。相关研究表明,膝关节所承受的压力与屈膝角度有关,也与身体各部位(躯干、小腿等)的倾斜度有关,其运动是很复杂的,因此,只有充分了解患者膝关节在锻炼过程中的受力情况以及膝关节受力情况与患者锻炼和行走姿态之间的相互关系,才能够针对患者的实际情况制定科学的锻炼计划,从而可以预防患者在康复锻炼过程中出现运动性损伤的现象。
4.目前,由于现有设备缺乏对膝关节所承受的压力的生物力学研究,使得难以获取患者在锻炼过程中的相关生物力学参数,不利于更加科学、系统的对退行性骨关节病患者的康复性锻炼进行指导和制定适合不同患者的锻炼计划,为此,我们提出一种基于bp神经网络的康复锻炼模型。
技术实现要素:
5.本发明的主要目的在于提供一种基于bp神经网络的康复锻炼模型,可以有效解决背景技术中的问题。
6.为实现上述目的,本发明采取的技术方案为:
7.一种基于bp神经网络的康复锻炼模型,所述的康复锻炼模型构建步骤包括:
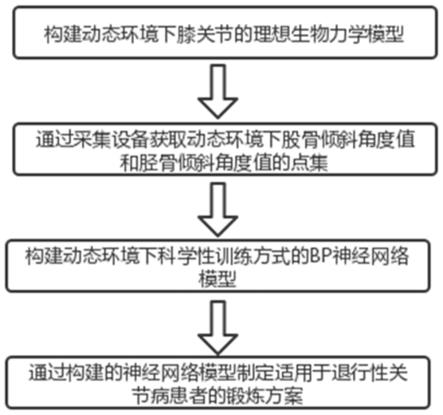
8.步骤一:构建动态环境下膝关节的理想生物力学模型
9.通过构建理想的膝关节生物力学模型,获取患者在动态环境下膝盖承压值与运动姿态参数之间的数学关系式;
10.具体步骤为:简化膝关节生理构造,构建以股骨为支点,以胫骨和髌骨长度为力臂的力学结构模型,以运动过程中膝关节处于弯曲状态时的某一时刻为研究对象,将力学结构模型代入刚体力学理论公式中,则有:
[0011][0012]
式中:f为膝关节承受压力值;ω1为上肢重力值;ω2为大腿重力值;l1为股骨长度值;α为股骨倾斜角度值;β为胫骨倾斜角度值;r为髌骨外缘面到支点的距离;其中α的取值范围为(0,π),β的取值范围为
[0013]
步骤二:通过采集设备获取动态环境下股骨倾斜角度值α和胫骨倾斜角度值β的点集(∑α,∑β)
[0014]
所述的采集设备包括固定于分别胫骨上部和髌骨下端外侧位置处的贴片式拉力传感器、安装于髌骨外侧用于连接两个拉力传感器的弹性元件、安装于足跟底部的压力传感器、具有数据存储单元的电路主板和通信模块,所述压力传感器与电路主板无线通信;
[0015]
所述的点集(∑α,∑β)的获取步骤为:
[0016]
s1:将采集设备安装于被采集对象下肢的对应位置处,调节弹性元件的长度值,使被采集对象在膝关节保持直立的状态时,两个拉力传感器的读数值均为零,记录该状态下胫骨与股骨之间的夹角,记为膝关节的弯曲角此状态下值为π;
[0017]
s2:被采集对象双脚掌平行站立,然后抬起一侧脚掌后,缓慢下蹲至最大行程位置,并记录此状态时的拉力传感器读数值f1和f2,压力传感器的读数值f
足
,取f1和f2的平均值记为f
max
,并测量此时膝关节的弯曲角
[0018]
s3:重复s2步骤n次,记录多组拉力传感器读数值f
maxi
和膝关节的弯曲角分别计算多组拉力传感器读数值f
maxi
和膝关节的弯曲角的平均值和计算公式为:
[0019][0020]
其中:i=1、2、3、、、n;
[0021]
s4:取点(0,π)和为起始点,在坐标系中建立拟合直线,并求出以膝关节的弯曲角为自变量,以拉力传感器读数值f
max
为因变量的直线方程,其中方程的表达式为:
[0022][0023]
s5:将s2步骤中获取的f
max
数值带入到s4步骤的方式表达式中,求出若干组弯曲角的数值,并通过以下计算公式分别计算出为股骨倾斜角度值α和为胫骨倾斜角度值β,计算公式为:
[0024][0025]
通过上述公式分别计算出一组α和β值,并记为一个点(α,β),再获取多组点的集合即为(∑α,∑β);
[0026]
步骤三:构建动态环境下科学性训练方式的bp神经网络模型
[0027]
s1:确定bp神经网络的输入指标值;
[0028]
s2:取科学性康复训练方案中p名训练示范人员的指标值作为训练网络的输入向量,即x=(xi,j),i=1~p,j=1~4;并取科学性康复训练方案中的q种相关训练方式的量化结果作为神经网络的目标输出向量y=(yi),i=1~q;
[0029]
s3:取神经网络的隐层为6个神经元,分别选择sigmoid和pureline函数作为隐层和输出层的传递函数,对该网络进行1500次训练,确定输入与输出之间的函数关系,即为动态环境下科学性的bp神经网络模型;
[0030]
步骤四:通过构建的神经网络模型制定适用于退行性关节病患者的锻炼方案
[0031]
具体方法为:将采集到的退行性关节病患者的输入指标值输入步骤三获取的bp神经网络模型中,根据输出结果,获取适用于该退行性关节病患者的训练方案。
[0032]
进一步的,根据国家技术监督局颁布的“中国成年人人体尺寸”和“中国成年人环节相对质量和环节质心相对位置国家标准”可以获得所述步骤一中的上肢重力值ω1;大腿重力值ω2、股骨长度l1值、人体自重ω和身高h之间的关系为:l1=0.232h,ω1=0.8168ω,ω2=0.1406ω,其中根据测量结果可以获得髌骨外缘面到支点的距离r=30258
±
0.484cm。
[0033]
进一步的,所述的动态环境包括但不限于原地深蹲状态、匀速行走状态和匀速慢跑状态。
[0034]
进一步的,所述的bp神经网络的输入指标值包括但不限于股骨倾斜角度值α、胫骨倾斜角度值β、动态环境下的移动速度v和体重值ω。
[0035]
进一步的,所述步骤三中p的值不小于10。
[0036]
进一步的,所述步骤三中相关训练方式的种类包括但不限于坐位屈膝运动、站立深蹲运动、慢跑运动、快走运动、自行车运动和抗阻训练。
[0037]
进一步的,该锻炼模型的构建步骤如下:
[0038]
步骤一,通过构建理想的膝关节生物力学模型,对生物力学模型中膝关节的受力情况进行分析,并将分析结果带入到刚体力学理论公式中,获取患者在动态环境下膝盖承压值与运动姿态参数之间的数学关系式,从而构建动态环境下膝关节的理想生物力学模型;
[0039]
步骤二,通过将提出的采集设备安装至被采集对象下肢的对应位置处,并采用提出的点集(∑α,∑β)的获取方法,获取被采集对象在动态环境下股骨倾斜角度值α和胫骨倾斜角度值β的点集(∑α,∑β);
[0040]
步骤三,以科学性的锻炼方法为参照,取科学性康复训练方案中训练示范人员的指标值作为训练网络的输入向量,取科学性康复训练方案中的相关训练方式的量化结果作为神经网络的目标输出向量,构建动态环境下科学性训练方式的bp神经网络模型,其中,相
关训练方式的量化结果可以采用评级赋值法获取,以综合评估后最佳的康复训练方案为参考,对各种训练方案进行评级,划分为若干个等级,然后对划分后的等级进行赋值,得到量化结果;
[0041]
步骤四:采集退行性关节病患者的输入指标值,并将采集的数据输入构建的bp神经网络模型中,获取适用于该退行性关节病患者的训练方案。
[0042]
与现有技术相比,本发明具有如下有益效果:
[0043]
(1)通过构建建理想的膝关节生物力学模型,针对对膝关节所承受的压力的生物力学进行深入研究,获取患者在动态环境下膝盖承压值与运动姿态参数之间的数学关系式,通过提车的采集设备和采集方法获取动态环境下股骨倾斜角度值α和胫骨倾斜角度值β的点集(∑α,∑β),作为神经网络的输入指标值,并将获取的其余各项输入指标值带入至构建的动态环境下科学性训练方式的bp神经网络模型中,获取适用于对应退行性关节病患者的训练方案,有利于对退行性骨关节病患者的康复性锻炼进行科学性和系统性的指导,协助制定适合不同患者的锻炼计划。
附图说明
[0044]
图1为本发明一种基于bp神经网络的康复锻炼模型的流程图。
具体实施方式
[0045]
下面结合具体实施方式对本发明作进一步的说明,其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本发明的限制,为了更好地说明本发明的具体实施方式,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸。
[0046]
实施例1
[0047]
如图1所示,一种基于bp神经网络的康复锻炼模型,所述的康复锻炼模型构建步骤包括:
[0048]
步骤一:构建动态环境下膝关节的理想生物力学模型
[0049]
通过构建理想的膝关节生物力学模型,获取患者在动态环境下膝盖承压值与运动姿态参数之间的数学关系式;
[0050]
具体步骤为:简化膝关节生理构造,构建以股骨为支点,以胫骨和髌骨长度为力臂的力学结构模型,以运动过程中膝关节处于弯曲状态时的某一时刻为研究对象,将力学结构模型代入刚体力学理论公式中,则有:
[0051][0052]
式中:f为膝关节承受压力值;ω1为上肢重力值;ω2为大腿重力值;l1为股骨长度值;α为股骨倾斜角度值;β为胫骨倾斜角度值;r为髌骨外缘面到支点的距离;其中α的取值范围为(0,π),β的取值范围为
[0053]
步骤二:通过采集设备获取动态环境下股骨倾斜角度值α和胫骨倾斜角度值β的点集(∑α,∑β)
[0054]
所述的采集设备包括固定于分别胫骨上部和髌骨下端外侧位置处的贴片式拉力传感器、安装于髌骨外侧用于连接两个拉力传感器的弹性元件、安装于足跟底部的压力传感器、具有数据存储单元的电路主板和通信模块,所述压力传感器与电路主板无线通信;
[0055]
所述的点集(∑α,∑β)的获取步骤为:
[0056]
s1:将采集设备安装于被采集对象下肢的对应位置处,调节弹性元件的长度值,使被采集对象在膝关节保持直立的状态时,两个拉力传感器的读数值均为零,记录该状态下胫骨与股骨之间的夹角,记为膝关节的弯曲角此状态下值为π;
[0057]
s2:被采集对象双脚掌平行站立,然后抬起一侧脚掌后,缓慢下蹲至最大行程位置,并记录此状态时的拉力传感器读数值f1和f2,压力传感器的读数值f
足
,取f1和f2的平均值记为f
max
,并测量此时膝关节的弯曲角
[0058]
s3:重复s2步骤n次,记录多组拉力传感器读数值f
maxi
和膝关节的弯曲角分别计算多组拉力传感器读数值f
maxi
和膝关节的弯曲角的平均值和计算公式为:
[0059][0060]
其中:i=1、2、3、、、n;
[0061]
s4:取点(0,π)和为起始点,在坐标系中建立拟合直线,并求出以膝关节的弯曲角为自变量,以拉力传感器读数值f
max
为因变量的直线方程,其中方程的表达式为:
[0062][0063]
s5:将s2步骤中获取的f
max
数值带入到s4步骤的方式表达式中,求出若干组弯曲角的数值,并通过以下计算公式分别计算出为股骨倾斜角度值α和为胫骨倾斜角度值β,计算公式为:
[0064][0065]
通过上述公式分别计算出一组α和β值,并记为一个点(α,β),再获取多组点的集合即为(∑α,∑β);
[0066]
步骤三:构建动态环境下科学性训练方式的bp神经网络模型
[0067]
s1:确定bp神经网络的输入指标值;
[0068]
s2:取科学性康复训练方案中p名训练示范人员的指标值作为训练网络的输入向量,即x=(xi,j),i=1~p,j=1~4;并取科学性康复训练方案中的q种相关训练方式的量
化结果作为神经网络的目标输出向量y=(yi),i=1~q;
[0069]
s3:取神经网络的隐层为6个神经元,分别选择sigmoid和pureline函数作为隐层和输出层的传递函数,对该网络进行1500次训练,确定输入与输出之间的函数关系,即为动态环境下科学性的bp神经网络模型;
[0070]
步骤四:通过构建的神经网络模型制定适用于退行性关节病患者的锻炼方案
[0071]
具体方法为:将采集到的退行性关节病患者的输入指标值输入步骤三获取的bp神经网络模型中,根据输出结果,获取适用于该退行性关节病患者的训练方案。
[0072]
进一步的,根据国家技术监督局颁布的“中国成年人人体尺寸”和“中国成年人环节相对质量和环节质心相对位置国家标准”可以获得所述步骤一中的上肢重力值ω1;大腿重力值ω2、股骨长度l1值、人体自重ω和身高h之间的关系为:l1=0.232h,ω1=0.8168ω,ω2=0.1406ω,其中根据测量结果可以获得髌骨外缘面到支点的距离r=30258
±
0.484cm。
[0073]
进一步的,所述的动态环境包括但不限于原地深蹲状态、匀速行走状态和匀速慢跑状态。
[0074]
进一步的,所述的bp神经网络的输入指标值包括但不限于股骨倾斜角度值α、胫骨倾斜角度值β、动态环境下的移动速度v和体重值ω。
[0075]
进一步的,所述步骤三中p的值不小于10。
[0076]
进一步的,所述步骤三中相关训练方式的种类包括但不限于坐位屈膝运动、站立深蹲运动、慢跑运动、快走运动、自行车运动和抗阻训练。
[0077]
通过采用上述技术方案:通过构建理想的膝关节生物力学模型,对生物力学模型中膝关节的受力情况进行分析,并将分析结果带入到刚体力学理论公式中,获取患者在动态环境下膝盖承压值与运动姿态参数之间的数学关系式,从而构建动态环境下膝关节的理想生物力学模型,通过将提出的采集设备安装至被采集对象下肢的对应位置处,并采用提出的点集(∑α,∑β)的获取方法,获取被采集对象在动态环境下股骨倾斜角度值α和胫骨倾斜角度值β的点集(∑α,∑β),以科学性的锻炼方法为参照,取科学性康复训练方案中训练示范人员的指标值作为训练网络的输入向量,取科学性康复训练方案中的相关训练方式的量化结果作为神经网络的目标输出向量,构建动态环境下科学性训练方式的bp神经网络模型,采集退行性关节病患者的输入指标值,并将采集的数据输入构建的bp神经网络模型中,获取适用于该退行性关节病患者的训练方案,有利于对退行性骨关节病患者的康复性锻炼进行科学性和系统性的指导,协助制定适合不同患者的锻炼计划。
[0078]
以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1