一种基于电阻抗技术结合触觉感知的轮椅控制方法与流程
1.本发明涉及电动轮椅控制技术领域,具体领域为一种基于电阻抗技术结合触觉感知控制轮椅的方法。
背景技术:
2.电动轮椅作为一种辅助康复治疗的设备,对于肢体伤残者以及行动不便者是必备的代步工具。随着科学技术的进步,尤其是人机交互的快速发展,通过语音、肢体语言等人类自然生活习惯的方式控制轮椅的运动替换传统人机接口如按键、摇杆等方法成为一个重要的研究方向。目前,常见的有基于脑电波、肌电、机器视觉、眼球信号控制轮椅的方法,对于脑电波和肌电控制,信号比较微弱,很容易受到干扰,而且脑电波需要使用者精神一直高度集中;机器视觉受摄像头影响限制了使用空间;眼球信号的识别干扰大并且长久使用会造成眼部疲劳。此外,上述控制方法的一个共同的缺点在于成本高,稳定性差。
技术实现要素:
3.本发明是为了解决上述现有技术存在的不足之处,提供一种基于电阻抗技术结合触觉感知的轮椅控制方法,以期能够快速的检测到不同触摸指令所对应的信号,并迅速对轮椅进行控制,从而解决现有技术中轮椅控制操作繁琐,灵敏度低,控制难,成本高的问题。
4.为实现上述目的,本发明提供如下技术方案:
5.本发明一种基于电阻抗技术结合触觉感知的轮椅控制方法的特点是应用于由轮椅控制器、信号采集装置和上位机所组成的控制系统中,并包括如下步骤:
6.步骤1、设计所述信号采集装置,包括:阻抗芯片、模拟开关、单片机、电源模块、电极和柔性压阻材料;
7.n个所述电极贴附在所述柔性压阻材料上,且呈均匀分布在所述柔性压阻材料的边界处,所述模拟开关用于控制所述阻抗芯片与所述电极之间的导通与断开,所述阻抗芯片用于向所述柔性压阻材料输出检测的激励信号以及采集所述电极测量到的电压信号,所述单片机用于控制所述模拟开关并所述阻抗芯片所采集的电压信号进行处理,所述电源模块用于为阻抗芯片、模拟开关、单片机进行供电;
8.当所述柔性压阻材料上无触摸动作时,依次测量n个电极中任意两个不同电极之间的电压数据,从而得到个电压值,记为其中,表示无触摸动作时第n-1个电极与第n个电极之间的电压值;
9.当所述柔性压阻材料上有触摸动作时,不依次测量n个电极中任意两个不同电极之间的电压数据,从而得到个电压值,记为其中,表示有触摸动作时第n-1个电极与第n个电极之间的电压值;
10.步骤2、上位机利用tk-noser成像方法对柔性压阻材料内的阻抗分布变化进行二维成像;
11.步骤2.1、利用开源软件包eidors建立柔性压阻材料的有限元模型,并得到有限元模型的电极数n
elec
和单元数m
elem
;令m
elem
个单元上的电导率为其中,σm表示第m个单元上的电导率,令v
ij
(σ)为电导率为σ分布下第i个模型电极和第j个模型电极之间的电压;m=1,2,...,m
elem
,i,j=1,2,...,n
elec
;
12.步骤2.2、利用式(1)计算有限元模型的灵敏度矩阵j:
[0013][0014]
步骤2.3、计算触摸动作的电压差数据δv=v
1-v0;
[0015]
步骤2.4、利用式(2)计算柔性压阻材料对应有限元模型单元上的电导率变化δσ:
[0016]
δσ=(j
t
wj+λ2r)-1jt
wδv=rm
·
δv
ꢀꢀ
(2)
[0017]
式(2)中,λ表示超参数,r表示由noser先验得到的先验矩阵,w为单位矩阵;
[0018]
步骤2.5、根据电导率变化δσ生成m
×
m的电导分布图像p;
[0019]
步骤2.6、对电导分布图像p进行阈值分割,得到分割后的二值化图像pb,其中,pb中第r行第c列的像素值是利用式(3)得到:
[0020][0021]
式(3)中,p(r,c)表示电导分布图像p中第r行第c列的像素值,t表示分割所用的阈值;
[0022]
步骤2.7、利用式(4)计算分割后的二值化图像pb的局部图像的几何中心坐标(x
centre
,y
centre
),并作为触摸坐标:
[0023][0024]
式(4)中,[pb]
pi
表示图像pb在第pi个像素处的电导率值,x
′
pi
表示图像pb中第pi个像素的横坐标值,y
′
pi
表示图像pb中第pi个像素的纵坐标值;
[0025]
步骤3、令所述柔性压阻材料的宽为w,高为h,且h》w,以柔性压阻材料的中心位置作为坐标原点,以平行所述柔性压阻材料的一条边作为x轴,以与x轴垂直的方向作为y轴,建立平面坐标系;
[0026]
步骤4、上位机在柔性压阻材料上划分出边长为l的六个正方形区域,用于定义指令操作;其中,六个正方形区域分别记为区域a1、区域a2、区域a3、区域a4、区域a5、区域a6,对应几何中心分别记为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4)、(x5,y5)、(x6,y6);
[0027]
步骤5、当触摸坐标(x
centre
,y
centre
)在区域a1内,定义触摸指令为轮椅前进指令;
[0028]
当触摸坐标(x
centre
,y
centre
)在区域a2内,定义轮椅指令为轮椅前进;
[0029]
当触摸坐标(x
centre
,y
centre
)在区域a1内,定义轮椅指令为轮椅前进;
[0030]
当触摸坐标(x
centre
,y
centre
)在区域a2内,定义轮椅指令为轮椅左拐;
[0031]
当触摸坐标(x
centre
,y
centre
)在区域a3内,定义轮椅指令为轮椅右拐;
[0032]
当触摸坐标(x
centre
,y
centre
)在区域a4内,定义轮椅指令为轮椅后退;
[0033]
当触摸坐标(x
centre
,y
centre
)在区域a5内,定义轮椅指令为轮椅加速;
[0034]
当触摸坐标(x
centre
,y
centre
)在区域a6内,定义轮椅指令为轮椅减速;
[0035]
步骤6、上位机判断所述柔性压阻材料是否有触摸动作,若有,则执行步骤7;否则,上位机无输出;
[0036]
步骤7、上位机利用式(5)判断触摸坐标是否在六个正方形区域内,若是,则执行步骤8;否则,上位机无输出:
[0037][0038]
步骤8、上位机利用式(6)确定轮椅指令并发送给轮椅控制器:
[0039][0040]
步骤9、所述轮椅控制器根据轮椅指令驱动轮椅执行相应动作。
[0041]
本发明一种电子设备,包括存储器以及处理器的特点在于,所述存储器用于存储支持处理器执行所述轮椅控制方法的程序,所述处理器被配置为用于执行所述存储器中存储的程序。
[0042]
本发明一种计算机可读存储介质,计算机可读存储介质上存储有计算机程序,其特点在于,所述计算机程序被处理器运行时执行所述轮椅控制方法的步骤。
[0043]
与现有技术相比,本发明的有益效果是:
[0044]
1、本发明具有设备操作简单,控制方法简便,成本低的特点,通过在柔性压阻材料的边界处贴附少量的电极,利用阻抗采集电路能快速的检测到柔性压阻材料的边界电压信息,通过成像算法进一步得到阻抗分布信息,然后判断出使用者的控制意图并且将控制指令准确的传递给轮椅控制单元,从而实现仅仅用不同触摸指令完成电动轮椅的人机交互控制。
[0045]
2、本发明采用的电阻抗技术是一种无损测量的技术,通过在被测物体的表面贴附电极,施加可调的外部电激励信号,克服了脑电波、肌电信号比较微弱,很容易受到干扰的缺点,从而提高了控制输入系统的稳定性。
[0046]
3、本发明的柔性压阻材料成本低廉,具有柔性,能够覆盖在轮椅的任意位置以进行指令输入。
附图说明
[0047]
图1为本发明的控制系统框图;
[0048]
图2为本发明的电极信号采集装置系统框图;
[0049]
图3为本发明的柔性压阻材料电极放置图;
[0050]
图4为本发明的触摸指令的区域定义图;
[0051]
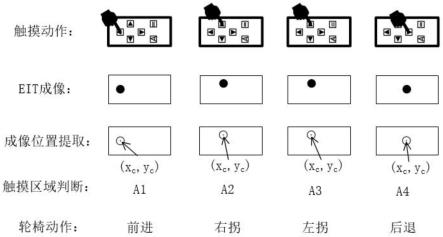
图5为本发明的不同触摸动作对应的控制指令图;
[0052]
图中标号:1、信号采集装置;2、上位机;3、轮椅控制器;4、电极;5、导线;6、模拟开关;7、阻抗芯片;8、单片机;9、无线传输模块;10、电源模块。
具体实施方式
[0053]
下面结合附图和具体实施方式对本发明进一步说明。
[0054]
本实施例中,一种基于电阻抗技术结合触觉感知的轮椅控制方法,如图1所示,是应用于由信号采集装置1、上位机2和轮椅控制器3所组成的控制系统中,并包括如下步骤:
[0055]
步骤1、如图2所示,设计信号采集装置,主要包括:阻抗芯片7、模拟开关6、单片机8、无线传输模块9、电源模块10、电极4、导线5;
[0056]
如图3所示,n个电极4贴附在柔性压阻材料11上,且呈均匀分布在柔性压阻材料的边界处,模拟开关6用于控制阻抗芯片7与电极4之间的导通与断开,阻抗芯片7用于向柔性压阻材料11输出检测的激励信号以及采集电极测量到的电压信号,单片机8用于控制模拟开关6并阻抗芯片7所采集的电压信号进行处理,并通过无线传输模块9发送到上位机2,电源模块10用于为阻抗芯片7、模拟开关6、单片机8、无线传输模块9进行供电;
[0057]
当柔性压阻材料11上无触摸动作时,依次测量n个电极中任意两个不同电极之间的电压数据,从而得到个电压值,记为其中,表示无触摸动作时第n-1个电极与第n个电极之间的电压值;
[0058]
当柔性压阻材料上有触摸动作时,不依次测量n个电极中任意两个不同电极之间的电压数据,从而得到个电压值,记为其中,表示有触摸动作时第n-1个电极与第n个电极之间的电压值;
[0059]
步骤2、上位机2利用tk-noser成像方法对柔性压阻材料11内的阻抗分布变化进行二维成像;
[0060]
步骤2.1、利用开源软件包eidors建立柔性压阻材料的有限元模型,并得到有限元模型的电极数n
elec
和单元数m
elem
;令m
elem
个单元上的电导率为其中,σm表示第m个单元上的电导率,令v
ij
(σ)为电导率为σ分布下第i个模型电极和第j个模型电极之间的电压;m=1,2,...,m
elem
,i,j=1,2,...,n
elec
;
[0061]
步骤2.2、利用式(1)计算有限元模型的灵敏度矩阵j:
[0062][0063]
步骤2.3、计算触摸动作的电压差数据δv=v
1-v0;
[0064]
步骤2.4、利用式(2)计算柔性压阻材料对应有限元模型单元上的电导率变化δσ:
[0065]
δσ=(j
t
wj+λ2r)-1jt
wδv=rm
·
δv
ꢀꢀ
(2)
[0066]
式(2)中,λ表示超参数,r表示由noser先验得到的先验矩阵,w为单位矩阵;
[0067]
步骤2.5、根据电导率变化δσ生成m
×
m的电导分布图像p;
[0068]
步骤2.6、对电导分布图像p进行阈值分割,得到分割后的二值化图像pb,其中,pb中第r行第c列的像素值是利用式(3)得到:
[0069][0070]
式(3)中,p(r,c)表示电导分布图像p中,t表示阈值分割所用的阈值;
[0071]
步骤2.7、利用式(4)计算分割后的二值化图像pb的局部图像的几何中心坐标(x
centre
,y
centre
),并作为触摸坐标:
[0072][0073]
式(4)中,[pb]
pi
表示图像pb在第pi个像素处的电导率值,x
′
pi
表示图像pb中第pi个像素的横坐标值,y
′
pi
表示图像pb中第pi个像素的纵坐标值;
[0074]
步骤3、如图4所示,令柔性压阻材料的宽为w,高为h,且h》w,以柔性压阻材料的中心位置作为坐标原点,以平行柔性压阻材料的一条边作为x轴,以与x轴垂直的方向作为y轴,建立平面坐标系;实际柔性压阻材料的尺寸与柔性压阻材料的有限元模型的尺寸对应;
[0075]
步骤4、上位机在柔性压阻材料上划分出边长为l的六个正方形区域,用于定义指令操作;其中,六个正方形区域分别记为区域a1、区域a2、区域a3、区域a4、区域a5、区域a6,对应几何中心分别记为(x1,y1)、(x2,y2)、(x3,y3)、(x4,y4)、(x5,y5)、(x6,y6);
[0076]
步骤5、当触摸坐标(xc,yc)在区域a1内,定义触摸指令为轮椅前进指令;
[0077]
当触摸坐标(x
centre
,y
centre
)在区域a2内,定义轮椅指令为轮椅前进;
[0078]
当触摸坐标(x
centre
,y
centre
)在区域a1内,定义轮椅指令为轮椅前进;
[0079]
当触摸坐标(x
centre
,y
centre
)在区域a2内,定义轮椅指令为轮椅左拐;
[0080]
当触摸坐标(x
centre
,y
centre
)在区域a3内,定义轮椅指令为轮椅右拐;
[0081]
当触摸坐标(x
centre
,y
centre
)在区域a4内,定义轮椅指令为轮椅后退;
[0082]
当触摸坐标(x
centre
,y
centre
)在区域a5内,定义轮椅指令为轮椅加速;
[0083]
当触摸坐标(x
centre
,y
centre
)在区域a6内,定义轮椅指令为轮椅减速;
[0084]
步骤6、上位机判断柔性压阻材料是否有触摸动作,若有,则执行步骤7;否则,上位机无输出;
[0085]
步骤7、上位机利用式(5)判断触摸坐标是否在六个正方形区域内,若是,则执行步骤8;否则,上位机无输出:
[0086][0087]
步骤8、上位机利用式(6)确定轮椅指令并发送给轮椅控制器:
[0088][0089]
步骤9、轮椅控制器根据轮椅指令驱动轮椅执行相应动作。
[0090]
如图5所示,为不同触摸动作的控制意图,以前进指令为例:按压设定好的前进指令所在区域,采集对应的信号进行eit成像,之后提取按压的位置,由于触摸区域在a1范围内,上位机向轮椅控制器发送前进指令。此外,本发明提供的控制指令不限于所提出的前进、右拐、左拐、后退、停止、加速;所定义的指令区域可以根据用户的个性化需求进行定制;
[0091]
综上所述,本技术一种基于电阻抗技术结合触觉感知的轮椅控制方法包括了柔性压阻材料、信号采集装置,上位机。该方法所采用的材料为柔性导电材料,能够大面积地包覆在复杂三维物体表面来检测触摸动作,具有结构十分简单,灵敏度高,控制简单,稳定性好,成本低等特点。
[0092]
本实施例中,一种电子设备,包括存储器以及处理器,该存储器用于存储支持处理器执行该轮椅控制方法的程序,该处理器被配置为用于执行该存储器中存储的程序。
[0093]
本实施例中,一种计算机可读存储介质,是在计算机可读存储介质上存储有计算机程序,该计算机程序被处理器运行时执行该轮椅控制方法的步骤。
[0094]
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1