壳状牙科器械切割路径生成方法、电子设备及切割系统与流程
本发明涉及牙齿矫治,特别涉及一种壳状牙科器械切割路径生成方法、电子设备及切割系统。
背景技术:
1、在壳状牙科器械的加工过程中,通常需要经过牙颌模型3d打印、备膜、压膜、壳状牙科器械切割、清洗等工序。其中壳状牙科器械的切割是壳状牙科器械制备工序中的重要一环。
2、现有技术中,对于壳状牙科器械的切割,通常是人工切割,人工切割主要依靠工人手动切割,其切割效果依赖于工人经验,切割过程耗费人力并且生产效率低。
3、随着壳状牙科器械自动化生产的推进,壳状牙科器械的切割工序也逐步使用自动化的机械切割方式。目前对壳状牙科器械实现机械切割的具体过程如下:将压膜好的牙颌模型置放到用于承载该牙颌模型的治具上;标定视觉坐标系的坐标平面与治具表面重合,通过视觉识别对牙颌模型进行定位与坐标转换,将牙颌模型空间坐标系下的预设切割路径转换为治具坐标系的切割路径,然后用激光或切针等切割设备按照预设的切割路径,通过固定切割设备改变承载治具位置,或者通过改变切割设备位置而固定承载治具位置,或者同时变换两者位置,将壳状牙科器械沿预设的切割路径切割下来,从而得到切割后的壳状牙科器械。
4、当压膜后的牙颌模型放置在承载治具上后,其具有6个自由度,即沿x轴平移,沿y轴平移,沿z轴平移,绕x轴旋转,绕y轴旋转以及绕z轴旋转,理论上切割过程中需要考虑该6个自由度的变化,然而,目前的实际作业仅考虑其中的沿x轴平移,沿y轴平移,绕z轴旋转3个自由度,而忽略了沿z轴平移,绕x轴旋转,绕y轴旋转这三个自由度,这是由于上述切割过程是基于牙颌模型坐标系的xy平面与经过标定的承载治具的承载面贴合的设定,一般来说,若牙颌模型坐标系的xy平面与经过标定的治具的承载面贴合,在切割过程中仅考虑沿x轴平移,沿y轴平移,绕z轴旋转的3个自由度是合理,但实际上,在很多情况下,牙颌模型坐标系的xy平面与承载治具的承载面并无法贴合,例如,打印牙颌模型时,当打印的牙颌模型底面不平整,又或者是,压膜后膜片底面不平整,这些均可能导致牙颌模型坐标系的xy平面与承载的治具的承载面无法贴合,这种不贴合将导致预设的切割路径偏离实际切割位置,从而导致实际的切割路径存在切割偏差,最终很可能使得切割后的壳状牙科器械不合格。
技术实现思路
1、本发明解决的技术问题是提供一种壳状牙科器械切割路径生成方法、电子设备及切割系统,以解决现有由于牙颌模型坐标系的xy平面与承载治具的承载面无法贴合导致的切割路径存在切割偏差的问题。
2、为实现上述目的,本技术实施例提供了一种壳状牙科器械切割路径生成方法,包括如下步骤:
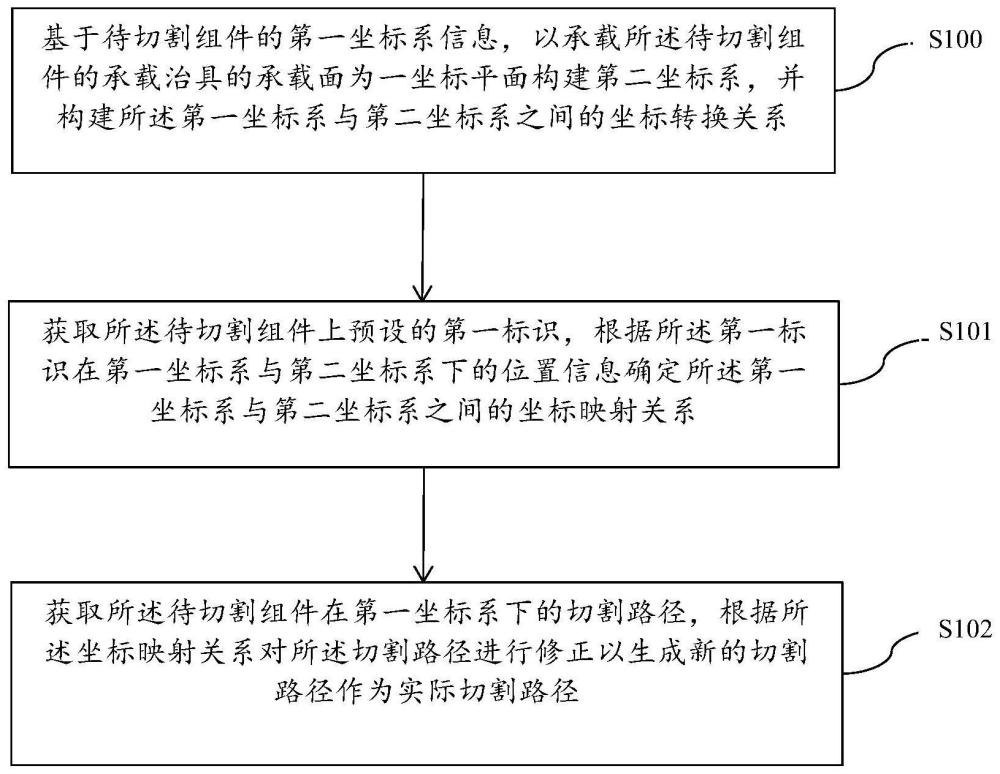
3、基于待切割组件的第一坐标系信息,以承载所述待切割组件的承载治具的承载面为一坐标平面构建第二坐标系,并构建所述第一坐标系与第二坐标系之间的坐标转换关系;
4、获取所述待切割组件上预设的第一标识,根据所述第一标识在第一坐标系与第二坐标系下的位置信息确定所述第一坐标系与第二坐标系之间的坐标映射关系;
5、获取所述待切割组件在第一坐标系下的切割路径,根据所述坐标映射关系对所述切割路径进行修正生成实际切割路径。
6、优选地,所述待切割组件包括牙颌模型和压制在所述牙颌模型上的待切割壳状牙科器械,所述牙颌模型上设置有预设位置信息的所述第一标识,并设置有用于识别所述第一坐标系的至少一坐标轴的第二标识。
7、优选地,所述在所述待切割组件承载治具的承载面构建第二坐标系的步骤,包括:
8、根据所述第二标识确定所述第一坐标系的第一坐标轴与坐标原点;
9、根据所述第一坐标系的第一坐标轴与坐标原点于所述承载面的投影建立所述第二坐标系的第一坐标轴与坐标原点;
10、基于所述第二坐标系的第一坐标轴与坐标原点于所述承载面建立所述第二坐标系的第二坐标轴;
11、基于所述第二坐标系的第一坐标轴、第二坐标轴建立所述第二坐标系的第三坐标轴。
12、优选地,在根据所述第一坐标系的第一坐标轴与坐标原点于所述承载面的投影建立所述第二坐标系的第一坐标轴与坐标原点步骤中,通过图像采集装置视觉垂直识别投影至所述第一坐标系的第一坐标轴与坐标原点,根据视觉识别结果确定所述第二坐标系的第一坐标轴与坐标原点。
13、优选地,所述基于所述第二坐标系的第一坐标轴、第二坐标轴建立所述第二坐标系的第三坐标轴的步骤中,利用叉乘,基于已确定的第二坐标系的第一坐标轴及第二坐标轴确定所述第二坐标系的第三坐标轴。
14、优选地,所述构建所述第一坐标系与第二坐标系之间的坐标转换关系,包括:
15、所述第一坐标系的坐标原点沿第二坐标系的第三坐标轴方向移动相应距离,所述第一坐标系的坐标原点与第二坐标系的坐标原点重合;
16、坐标原点重合后的所述第一坐标系绕所述第二坐标系的第二坐标轴旋转相应角度,所述第一坐标系的第一坐标轴与第二坐标系的第一坐标轴重合;
17、第一坐标轴重合后的所述第一坐标系绕所述第二坐标系的第一坐标轴旋转相应角度,所述第一坐标系的第二坐标轴与第二坐标系的第二坐标轴重合。
18、优选地,所述根据所述第一标识在第一坐标系与第二坐标系下的位置信息确定所述第一坐标系与第二坐标系之间的坐标映射关系,包括:
19、获取所述第一标识在第一坐标系下的第一位置信息;
20、获取所述第一标识在所述第二坐标系下的第二位置信息;
21、基于所述第一位置信息、第二位置信息以及所述第一坐标系与第二坐标系之间的转换关系,确定所述坐标转换关系中的坐标转换参数,基于确定的坐标转换参数得到所述第一坐标系与第二坐标系之间的坐标映射关系,所述坐标转换参数包括所述第一坐标系的坐标原点沿第二坐标系的第三坐标轴方向移动的距离、绕所述第二坐标系第二坐标轴旋转的角度以及绕所述第二坐标系第一坐标轴旋转的角度。
22、优选地,在所述构建所述第一坐标系与第二坐标系之间的坐标转换关系步骤中,基于所述第一坐标系与第二坐标系之间的坐标转换关系,构建如下坐标转换矩阵:
23、
24、其中,t为所述第一坐标系的坐标原点沿第二坐标系的第三坐标轴方向移动的距离,β为绕所述第二坐标系第二坐标轴旋转的角度,α为绕所述第二坐标系第一坐标轴旋转的角度。
25、优选地,基于所述第一位置信息、第二位置信息以及所述坐标转换矩阵,得到所述第一坐标系的坐标原点沿第二坐标系的第三坐标轴方向移动的距离t、绕所述第二坐标系第二坐标轴旋转的角度β以及绕所述第二坐标系第一坐标轴旋转的角度α,从而得到所述第一坐标系与第二坐标系之间的坐标映射关系。
26、优选地,所述获取所述第一标识在所述第二坐标系下的第二位置信息,包括:
27、基于所述承载面所在的坐标平面,视觉识别确定所述第一标识相对该坐标平面第一坐标轴、第二坐标轴方向的坐标值;
28、通过测距装置获取所述第一标识在所述第二坐标系下相对第三坐标轴方向的坐标值。
29、优选地,所述第一标识设置在所述牙颌模型上易于视觉识别的位置。
30、优选地,所述第一标识设置在所述牙颌模型牙冠上的局部高点。
31、优选地,所述牙颌模型上设置有两个以上的第一标识。
32、优选地,对每个第一标识,计算得到对应的坐标转换参数,基于多个第一标识对应的坐标转换参数获得最终的第一坐标系与第二坐标系之间的坐标转换参数,从而得到所述第一坐标系与第二坐标系之间的坐标映射关系。
33、优选地,所述方法还包括:
34、基于所述第一坐标系与第二坐标系之间的坐标转换关系确定预设切割路径与实际切割路径中相应切割点的切割入射角的角度转换关系,根据所述角度变换关系与预设切割路径下各切割点的切割入射角确定所述实际切割路径下各切割点的切割入射角。
35、优选地,所述基于所述第一坐标系与第二坐标系之间的坐标转换关系确定预设切割路径与实际切割路径中相应切割点的切割入射角的角度转换关系步骤中,在所述第一坐标系与第二坐标系之间的坐标转换关系中,不考虑坐标系的平移,仅保留将坐标原点重合后的所述第一坐标系绕所述第二坐标系的第二坐标轴旋转相应角度以及将第一坐标轴重合后的所述第一坐标系绕所述第二坐标系的第一坐标轴旋转相应角度的角度转换,以确定预设切割路径与实际切割路径中相应切割点的切割入射角的角度转换关系。
36、优选地,基于所述第一坐标系与第二坐标系之间的坐标转换关系确定预设切割路径与实际切割路径中相应切割点的切割入射角的角度转换关系步骤中,基于所述角度变换关系获得如下角度变换矩阵:
37、
38、其中,β为绕所述第二坐标系第二坐标轴旋转的角度,α为绕所述第二坐标系第一坐标轴旋转的角度。
39、为实现上述目的,本技术实施例还提供一种电子设备,包括:
40、至少一个处理器;以及,
41、与所述至少一个处理器通信连接的存储器;其中,
42、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的壳状牙科器械切割路径生成方法。
43、为实现上述目的,本技术实施例还提供一种壳状牙科器械的切割系统,包括:控制装置、承载治具、图像采集装置、测距装置、拾取装置、切割装置以及待切割组件,所述控制装置分别与所述拾取装置、图像采集装置、测距装置及切割装置通信连接,所述待切割组件设置于所述承载治具,其上设置有预设位置信息的第一标识及用于识别所述第一坐标系的第二标识,所述图像采集装置设置于所述承载治具上方,将采集的图像发送至所述控制装置,所述测距装置用于测量其当前位置与第一标识对应所述待切割组件的待切割壳状牙科器械外侧表面处的距离并提供给控制装置,所述控制装置被配置为基于所述图像采集装置、测距装置采集的信息执行上述的壳状牙科器械切割路径生成方法,得到第二坐标系下的实际切割路径,并根据所述实际切割路径,控制所述拾取设备和切割设备相对运动,以沿所述实际切割路径切割得到待切割壳状牙科器械。
44、通过本发明提供的壳状牙科器械切割路径生成方法、电子设备及切割系统,能够带来的有益效果如下:
45、1、本发明基于牙颌坐标系,以承载治具的承载面为坐标平面、基于牙颌坐标系建立的第二坐标系作为辅助坐标系,通过将牙颌坐标系下的预设切割路径转换为辅助坐标系下的实际切割路径,再将辅助坐标系下的实际切割路径再转换到拾取装置空间坐标系下的运动路径,使得拾取装置能够带动待切割组件沿实际切割路径运动,提高了对牙颌模型上热压成型膜片切割路径的各切割点定位的精准性,使得在壳状牙科器械切割过程中,即使待切割组件的牙颌模型的底部不平整,也能实现壳状牙科器械的精准切割,从而提高了壳状牙科器械自动化生产的效率和良率,本发明可减少对3d打印、压膜等过程的各种约束;
46、2、本发明仅通过在牙颌模型上设置一个第一标识即可确定牙颌坐标系与辅助坐标系的坐标映射关系,通过该坐标映射关系即可将牙颌坐标系下的预设切割路径转换为辅助坐标系下的实际切割路径,计算简单,易于实现;
47、3、本发明通过在牙颌模型上设置多个第一标识,可以减少采用一个第一标识确定牙颌坐标系与辅助坐标系的偏差,提高实际切割路径生成的精准度,从而更进一步提高了壳状牙科器械自动化生产的效率和良率。
- 还没有人留言评论。精彩留言会获得点赞!