一种基于IMU的下肢外骨骼控制装置及方法
一种基于imu的下肢外骨骼控制装置及方法
技术领域
1.本发明属于外骨骼机器人领域,特别是涉及一种基于imu的下肢外骨骼控制装置及方法。
背景技术:
2.下肢康复医疗外骨骼能够辅助下肢运动障碍患者进行康复训练,由于其巨大的应用场景,已成为当前各国的研究热点。随着人口老龄化,下肢行动不便的人口数量不断升高,下肢外骨骼已成为运动功能障碍患者恢复下肢运动能力最具前景的解决方案之一,康复外骨骼可以帮助患有脊髓脊柱损伤、脑卒中损伤和脑外伤等疾病的患者进行康复训练,帮助他们恢复运动能力。
3.目前市场上公开的下肢康复外骨骼主要是通过固定程序的方式来为患者提供简单重复的运动,不能根据患者当前的运动状态判断出应该施加多少的辅助力矩,无法让患者相应关节处的肌肉得到有效的康复训练,人机交互和训练效果并不理想,导致康复效果不佳。
技术实现要素:
4.针对现有技术中的上述不足,本发明提供的一种基于imu的下肢外骨骼控制装置及方法,能够根据患者的运动状态为其施加相应的辅助力矩,达到更好的人机交互的效果,让患者相应的关节肌肉得到有效训练,提高训练精准度。
5.为了达到上述发明目的,本发明采用的技术方案为:一种基于imu的下肢外骨骼控制装置包括imu、髋关节伺服电机、膝关节伺服电机、中央处理器、嵌入式控制器和电源模块,其中,imu置于装置的四个关节环处,髋关节伺服电机和膝关节伺服电机均置于装置等轴侧壁上,中央处理器、嵌入式控制器和电源模块均置于装置背面面板上,中央处理器分别与imu和嵌入式控制器通信连接,电源模块分别与imu、髋关节伺服电机、膝关节伺服电机、中央处理器和嵌入式控制器电连接。
6.上述方案的有益效果是:通过上述技术方案,能够实时获取患者的运动信息,为患者提供个性化的辅助治疗,实现人机交互,从而为患者提供精准的康复训练。
7.进一步地,髋关节伺服电机连接上方的两个髋关节环,所述膝关节伺服电机连接下方的两个膝关节环。
8.上述进一步方案的有益效果是:上述技术方案中,髋关节伺服电机控制髋关节环,对使用者的髋关节实行训练,而膝关节伺服电机控制膝关节环,对使用者的膝关节实行训练。
9.进一步地,imu置于关节环外侧,所述关节环由金属和柔性绑带连接而成。
10.上述进一步方案的有益效果是:上述技术方案中关节环由金属和柔性绑带构成,可以为使用者提供良好的支撑与绑缚,使外骨骼更好的贴合人体保证了施加辅助力矩的准确性,同时也保证了imu数据采集的准确性。
11.进一步地,髋关节环和膝关节环均置于装置竖轴内侧,髋关节伺服电机和膝关节伺服电机置于装置竖轴外侧,且置于两竖轴内侧的髋关节环、膝关节环和脚踏板均位于同一竖直平面。
12.上述进一步方案的有益效果是:上述技术方案能够保证使用者穿戴外骨骼运动时的柔顺性,且不会因为外骨骼的结构妨碍运动,装置的结构设计也为使用者提供更好的使用体验。
13.进一步地,装置中的两竖轴可通过螺栓自由调节高度。
14.上述进一步方案的有益效果是:上述技术方案能够灵活调节装置竖轴的高度,根据使用者的身高等个人情况来调节不同的高度,为使用者提供更舒适方便的训练服务,同时,可灵活调节也扩大了使用者范围。
15.除此之外,本发明还采用的技术方案为:一种基于imu的下肢外骨骼控制方法,其特征在于,所述方法包括以下步骤:
16.s1:利用imu采集使用者的运动信息;
17.s2:利用中央处理器将采集到的运动信息依据深度学习算法进行处理,生成电机控制信号;
18.s3:将电机控制信号传输至嵌入式控制器进行信号转换;
19.s4:通过经嵌入式控制器转换的信号控制关节伺服电机执行相应辅助动作;
20.s5:利用关节伺服电机中的角度传感器和力矩传感器监测外骨骼是否执行到目标位置并将执行状态反馈至嵌入式控制器,如果未达到预期目标值,通过嵌入式控制器对此次误差进行计算,并对下一次关节角度和关节力矩的预测值进行及时调整。
21.上述方案的有益效果是:上述技术方案利用imu手段能够准确、安全的获取运动者的步态信息,中央处理器利用深度学习算法对数据进行处理并将信号传递给嵌入式控制器进而控制关节伺服电机,使其执行相应辅助力矩,同时,角度传感器和力矩传感器会监测当前下肢外骨骼的运动状态,并及时反馈给中央处理器进行分析处理,减少装置的使用误差,为使用者提供更精确的训练。
22.进一步地,s2中深度学习算法包括以下分步骤:
23.s2-1:将imu采集的数据经滤波后提取合适的特征值输入训练好的神经网络模型;
24.s2-2:通过神经网络模型根据输入的特征值判断人体当前时刻的运动状态及步态相位;
25.s2-3:根据包括当前时刻t在内的前20ms的人体运动状态及步态相位数据预测t+1ms时刻的关节力矩和关节角度;
26.s2-4:利用中央处理器通过预测的下一时刻关节力矩和关节角度的数据生成电机控制信号。
27.上述进一步方案的有益效果是:上述技术方案利用深度学习算法,对获取到的人体步态信息进行分析处理,进而预测下一时刻的关节力矩和关节角度,同时将预测结果转换为电机控制信号,进而控制电机执行相应的辅助动作。
28.进一步地,s3中嵌入式控制器采用串级pid闭环控制算法,将深度学习算法获得的预期关节角度和关节力矩作为输入。
29.上述进一步方案的有益效果是:上述方案将控制信号转换成电机输出的辅助力矩
和旋转角度,以实现良好的人机交互性和良好的康复效果。
附图说明
30.图1为基于imu的下肢外骨骼控制装置的等轴侧视图。
31.图2为基于imu的下肢外骨骼控制装置的外骨骼背视图。
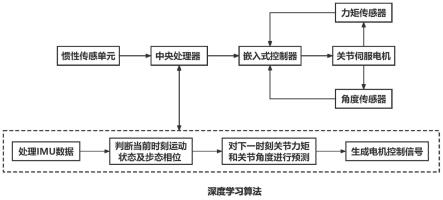
32.图3为基于imu的下肢外骨骼控制方法原理图。
33.图4为基于imu和视频流的下肢外骨骼控制方法流程图。
34.图5为串级pid控制算法流程图。
35.图6为髋膝关节单自由度简化模型。
36.其中:1、惯性传感单元(imu);2、髋关节伺服电机;3、膝关节伺服电机;4、中央处理器;5、嵌入式控制器;6、电源模块。
具体实施方式
37.下面结合附图和具体实施例对本发明做进一步说明。
38.实施例1,如图1和图2所示,一种基于imu的下肢外骨骼控制装置,包括imu1、髋关节伺服电机2、膝关节伺服电机3、中央处理器4、嵌入式控制器5和电源模块6,所述imu1置于装置的四个关节环处,所述髋关节伺服电机 2和膝关节伺服电机3均置于装置等轴侧壁上,所述中央处理器4、嵌入式控制器5和电源模块6均置于装置背面面板上,所述中央处理器4分别与imu1和嵌入式控制器5通信连接,所述电源模块5分别与imu1、髋关节伺服电机2、膝关节伺服电机3、中央处理器4和嵌入式控制器5电连接。
39.其中,髋关节伺服电机2连接上方的两个髋关节环,所述膝关节伺服电机3 连接下方的两个膝关节环,imu1置于关节环外侧,所述关节环由金属和柔性绑带连接而成,髋关节环和膝关节环均置于装置竖轴内侧,髋关节伺服电机2和膝关节伺服电机3置于装置竖轴外侧,且置于两竖轴内侧的髋关节环、膝关节环和脚踏板均位于同一竖直平面,装置中的两竖轴可通过螺栓自由调节高度。
40.实施例2,如图3和图4所示,一种基于imu的下肢外骨骼控制方法,其特征在于,所述方法包括以下步骤:
41.s1:利用imu采集使用者的运动信息;
42.s2:利用中央处理器将采集到的运动信息依据深度学习算法进行处理,生成电机控制信号;
43.s3:将电机控制信号传输至嵌入式控制器进行信号转换;
44.s4:通过经嵌入式控制器转换的信号控制关节伺服电机执行相应辅助动作;
45.s5:利用关节伺服电机中的角度传感器和力矩传感器监测外骨骼是否执行到目标位置并将执行状态反馈回嵌入式控制器,如果未达到预期目标值,通过利用嵌入式控制器对此次误差进行计算,并对下一次关节角度和关节力矩的预测值进行及时调整。
46.s2中深度学习算法包括以下分步骤:
47.s2-1:将imu采集的数据经滤波后提取合适的特征值输入训练好的神经网络模型;
48.s2-2:通过神经网络模型根据输入的特征值判断人体当前时刻的运动状态及步态相位;
49.s2-3:根据包括当前时刻t在内的前20ms的人体运动状态及步态相位数据预测t+1ms时刻的关节力矩和关节角度;
50.s2-4:利用中央处理器通过预测的下一时刻关节力矩和关节角度的数据生成电机控制信号。
51.s3中嵌入式控制器采用串级pid闭环控制算法,串级pid控制算法以位置环为第一环,实现关节角度控制,以速度环为第二环,实现关节角速度控制,以力矩环为第三环,实现输出力矩的控制。串级pid算法具体实现过程如图5 所示:利用深度学习算法获得的预期关节角度和关节力矩作为输入,嵌入式控制器得到期望关节角度θ并将其传入位置环pid控制器中,速度环pid控制器根据位置增量计算出期望的转速,力矩环pid控制器根据期望力矩控制电机的输出力矩,同时位置环和力矩环利用角度传感器和力矩传感器进行实时反馈以减小执行误差。
52.在本发明的一个实施例中,利用imu采集使用者当前时刻髋关节和膝关节的运动学数据,中央处理器通过深度学习算法将imu所采集的数据进行实时处理,对步态相位进行识别,并且对下一时刻的髋关节、膝关节的关节角度和关节力矩进行预测,中央处理器根据预测结果以及使用者当前运动状态将需要输出的辅助力矩以及关节角度目标值转换成电机控制信号,并传输至嵌入式控制器进而控制伺服电机执行相应的辅助动作,力矩传感器和角度传感器用于监测电机输出的辅助力矩和关节角度是否达到目标,如果未达到预期目标值,嵌入式控制器会对此次误差进行计算,并对下一次关节角度和关节力矩的预测值进行及时调整,防止误差过大而对外骨骼的控制产生影响,能够避免系统运行一段时间后可能产生的累积误差,同时提高系统的稳定性和执行精度。
53.为提高深度学习算法的精度,本发明采用公开的生物力学数据集训练深度学习模型,在深度神经网络算法利用数据集进行训练之前,便确定了数据的处理计算公式:
54.关节力矩计算公式如下所述:
[0055][0056]
其中,j为大腿或小腿对质心的转动惯量,为大腿或小腿的角加速度,m1为第一关节力矩,m2为第二关节力矩,f
1x
和f
1y
分别为大腿或小腿远端水平和竖直方向作用力,f
2x
和f
2y
分别为大腿或小腿近端水平和竖直方向作用力,l
1x
、 l
2x
、l
1y
和l
2y
分别为相关作用力关于质心的力臂;
[0057]
关节角速度计算公式为:ω
joint
=ω2j
2-ω1j1,将关节角速度积分得到关节角度为:q=∫ω
joint
dt;
[0058]
其中,图6为髋膝关节单自由度简化模型,imu1置于大腿处,用来获取髋关节运动数据,imu2置于小腿处,用来获取膝关节运动数据,基于imu1和imu2 建立p轴,j1和j2为imu1和imu2坐标系观测到的p轴的方位矢量,ω1和ω2分别分别为imu1和imu2的角速度;
[0059]
基于上述公式,该数据集利用分别布置在大腿和小腿质心位置处的四个 imu采集了数十名受试者的运动学数据,然后利用专业的生物力学分析软件 opensim对上述数据进行了计算,得到了步行时的关节角度、关节力矩等运动学和动力学数据,并建立了步态相位与关节角度和关节力矩的对应关系。模型训练时基于四个imu采集的人体下肢加速度和角速度数据,使用四阶巴特沃斯滤波器滤波后进行特征值计算,选用合适的特征值作为模型
输入,为获得良好的预测精度,深度学习模型集成了2d卷积神经网络和双向长短期记忆网络,当模型的预测精度达到使用要求后,便将深度学习模型部署至中央处理器,由于前期已经建立了步态相位与关节角度和关节力矩的关系,使用者在穿戴着外骨骼进行运动时,中央处理器就会实时计算当前时刻t的关节角度和关节力矩以判断使用者当前时刻t的步态相位,并根据包括当前时刻t在内的前20ms数据去预测t+1ms时刻的关节角度和关节力矩以生成电机的控制信号。
[0060]
通过上述实施例1和实施例2的技术方案,能准确获取到使用者的运动信息,针对每一位患者提供个性化的辅助力矩,实现良好的人机交互性能,从而为患者提供更精确、有效的康复训练。
[0061]
本发明提出的一种基于imu的下肢外骨骼控制装置及方法,利用imu非侵入性传感器获得人体的准确运动数据,结合深度学习算法对关节力矩和关节角度进行预测,进而得到电机在步态周期不同时刻输出的辅助力矩和关节角度的目标值,力矩传感器和角度传感器对外骨骼的执行状态进行监测,实现外骨骼的闭环控制,这样就能实现外骨骼对人体运动的实时跟随,获得良好的人机交互性能,并且针对每位患者可以输出个性化的辅助力矩,为患者提供精确的康复训练,能够更好的帮助使用者恢复肌肉功能,以达到康复训练的目的。
[0062]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。本领域的普通技术人员可以根据本发明公开的这些技术启示做出各种不脱离本发明实质的其它各种具体变形和组合,这些变形和组合仍然在发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1