电磁导航引导下的机械臂定位误差测量方法与流程
1.本发明涉及电磁导航系统技术领域,尤其涉及一种电磁导航引导下的机械臂定位误差测量方法。
背景技术:
2.医疗机器人的应用越来越广泛,电磁导航系统能够辅助医生完成手术,电磁导航系统的定位精度是确保手术安全、顺利完成的重要指标。现有技术中已经存在一些测试电磁导航系统定位精度的装置及方法,例如公告号为cn112378421b的发明专利公开了一种用于测试电磁导航系统定位精度的装置及方法,但是该方法需要精度测试装置的ct数据进行三维模型重建,测试精度受精度测试装置的加工精度及ct数据的拍摄质量影响,并且得到的测量误差为一个范围值,无法得出准确的误差测量值。
技术实现要素:
3.为了解决现有技术中存在的问题,本技术提出了一种电磁导航引导下的机械臂定位误差测量方法,该方法测量准确度高、测量效率高。
4.为了实现上述目的,本技术提出了一种电磁导航引导下的机械臂定位误差测量方法,包括以下步骤:
5.步骤1、将定位装置安装于电磁导航系统控制的电磁导航机器人的机械臂末端;其中,所述定位装置包括装置本体,所述装置本体上设有机械臂连接装置,通过所述机械臂连接装置将所述定位装置连接到电磁导航机器人的机械臂上,在所述装置本体上还安装有测量球和位置读取装置,所述位置读取装置与所述测量球的相对位姿不变,所述位置读取装置与所述电磁导航系统的接口单元相连接,用于与电磁导航系统配合使用,读取所述定位装置的位置信息;所述电磁导航系统包括上位机、磁场发生器、控制单元以及接口单元,所述接口单元与所述控制单元相连接,所述磁场发生器也与所述控制单元相连接,所述控制单元与所述上位机相连接;
6.步骤2、将所述定位装置放置在所述磁场发生器产生的磁场范围内;
7.步骤3、所述定位装置的注册:通过标定算法,将所述位置读取装置的坐标传送给电磁导航系统;
8.步骤4、通过所述电磁导航系统控制所述机械臂带动所述位置读取装置移动到磁场范围内的j1点位置处,在移动过程中,控制所述位置读取装置的位姿不变;通过测量系统中的测量装置读取此时所述测量球的位置信息,所述测量系统记录该位置信息,将该位置信息记作j点的位置信息,用xj、yj、zj表示;
9.步骤5、在所述电磁导航系统中至少输入n次增量坐标,n≥4,且n为偶数,以控制所述机械臂带动所述位置读取装置依次移动到磁场范围内的相应的n个点处,在移动过程中,控制所述位置读取装置的位姿不变,n个点构成n/2条线段,任意两条线段的交点都是j1点,且j1点到n个点中的每个点的距离都相等,每次移动后,通过所述测量系统中的测量装置读
取此时所述测量球的位置信息,所述测量系统记录该位置信息,将该位置信息用xi、yi、zi表示;
10.步骤6、通过公式计算机械臂的定位误差mi:其中,xj、yj、zj为步骤4中所述测量系统记录的位置信息,为步骤5中所述测量系统记录的n个位置信息所得的集群中心的位置坐标,其中,式中xi、yi、zi为步骤5中所述测量系统记录的相应的位置信息。
11.在一些实施例中,在所述步骤4中,所述j1点位置处在磁场范围的中心位置。
12.在一些实施例中,在所述步骤5中,当所述磁场发生器产生的磁场为方形磁场时,选择方形磁场的八个顶点及中心点作为所述位置读取装置要到达的目标点;当所述磁场发生器产生的磁场为球形磁场时,选择球形磁场的球心及球面上至少两对点作为所述位置读取装置要到达的目标点,其中将一条直径对应的两个点记作一对点。
13.在一些实施例中,在所述步骤4和步骤5中,控制所述机械臂带动所述位置读取装置移动,且在移动过程中,控制所述位置读取装置的位姿不变,具体做法如下:
14.步骤101、所述上位机接收机械臂传来的状态信息,该状态信息中包含了机械臂当前的位姿信息,将机械臂当前的位姿信息转换为4*4矩阵作为机械臂到位置读取装置的第一位姿转换矩阵,b=trans(e,b)*e,其中b表示位置读取装置坐标系,e表示机械臂坐标系,trans(e,b)表示第一位姿转换矩阵;
15.步骤102、所述上位机从控制单元获取所述位置读取装置在磁场发生器坐标系下的第二位姿转换矩阵,n=trans(b,n)*b,其中b表示位置读取装置坐标系,n表示磁场发生器坐标系,trans(b,n)表示第二位姿转换矩阵;通过第二位姿转换矩阵得到位置读取装置在磁场发生器坐标系下的坐标作为当前位置坐标,所述当前位置指位置读取装置当前停留的位置;
16.步骤103、将当前位置到目标位置的向量转换为4*4平移矩阵,其中目标位置为位置读取装置将要移动到的位置;目标位置坐标是磁场发生器坐标系下的坐标,通过第二位姿转换矩阵trans(b,n)转换得到相对应的位置读取装置坐标系下的坐标,再通过第一位姿转换矩阵trans(e,b)转换得到相对应的机械臂坐标系下的坐标,控制机械臂运动到相应位置,使位置读取装置移动到目标位置。
17.在一些实施例中,还包括步骤104、当位置读取装置移动完成后,再次获得位置读取装置的当前位置,与预先设定的目标位置相比较,判断位置读取装置是否移动到位;如果否,则循环步骤101~103。
18.本技术的该方案的有益效果在于上述电磁导航引导下的机械臂定位误差测量方法具有测量准确度高、测量效率高的优点,其能有效的检测电磁导航系统的定位精度。
附图说明
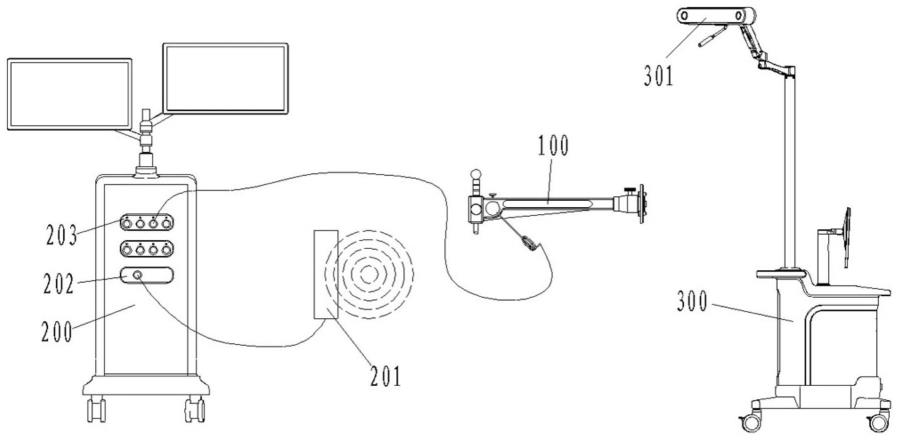
19.图1示出了实施例中电磁导航引导下的机械臂定位误差测量装置的结构示意图。
20.图2示出了实施例中定位装置的结构示意图。
21.图3示出了实施例中测量过程示意图。
22.附图标记:100-定位装置,200-电磁导航系统,300-测量系统,101-测量球,102-位置读取装置,103-机械臂连接装置,201-磁场发生器,202-控制单元,203-接口单元,301-测量装置。
具体实施方式
23.下面结合附图对本技术的具体实施方式作进一步的说明。
24.在本技术的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。
25.本技术所涉及的电磁导航引导下的机械臂定位误差测量方法包括以下步骤:
26.步骤1、将定位装置100安装于电磁导航系统200控制的电磁导航机器人的机械臂末端,其中,如图1~2所示,所述定位装置100包括装置本体,所述装置本体上设有机械臂连接装置103,通过所述机械臂连接装置103将所述定位装置100连接到电磁导航机器人的机械臂上,在所述装置本体上还安装有测量球101和位置读取装置102,所述位置读取装置102与所述测量球101的相对位姿不变,所述位置读取装置102与所述电磁导航系统200的接口单元203相连接,用于与电磁导航系统200配合使用,读取所述定位装置100的位置信息。具体的,所述位置读取装置102采用专利号为2020227007236所公开的一种与电磁导航系统配套使用的位置读取装置。所述电磁导航系统200包括上位机、磁场发生器201、控制单元202以及接口单元203,所述接口单元203与所述控制单元202相连接,所述磁场发生器201也与所述控制单元202相连接,所述控制单元202与所述上位机相连接。所述电磁导航系统200为现有技术中的已知系统,在此不做更详尽的描述。
27.步骤2、将所述定位装置100放置在所述磁场发生器201产生的磁场范围内。
28.步骤3、所述定位装置100的注册:通过标定算法,将所述位置读取装置102的坐标传送给电磁导航系统200。
29.步骤4、通过所述电磁导航系统200控制所述机械臂带动所述位置读取装置102移动到磁场范围内的j1点位置处,具体的所述j1点位置最好处在磁场范围的中心位置,在移动过程中,控制所述位置读取装置102的位姿不变,即与所述测量球101的相对方向和角度不变,因此所述测量球101的测量误差即为所述位置读取装置102的测量误差;通过测量系统300中的测量装置301读取此时所述测量球101的位置信息,所述测量系统300记录该位置信息,将该位置信息记作j点的位置信息,用xj、yj、zj表示。在本实施例中,所述测量系统300可以采用northern digital inc.公司的polaris vega position sensor光学测量产品。
30.步骤5、在所述电磁导航系统200中至少输入n次增量坐标,n≥4,且n为偶数,以控制所述机械臂带动所述位置读取装置102依次移动到磁场范围内的相应的n个点处,在移动过程中,控制所述位置读取装置102的位姿不变,n个点构成n/2条线段,任意两条线段的交点都是j1点,且j1点到n个点中的每个点的距离都相等,每次移动后,通过所述测量系统300中的测量装置301读取此时所述测量球101的位置信息,所述测量系统300记录该位置信息,将该位置信息用xi、yi、zi表示,如图3所示。
31.具体的,在本步骤中,当所述磁场发生器201产生的磁场为方形磁场时,选择方形
磁场的八个顶点及中心点作为所述位置读取装置102要到达的目标点。当所述磁场发生器201产生的磁场为球形磁场时,选择球形磁场的球心及球面上至少两对点(也就是两条直径对应的四个点)作为所述位置读取装置102要到达的目标点。
32.步骤6、通过公式计算机械臂的定位误差mi,所述机械臂的定位误差也就是所述电磁导航系统的定位误差,其中,xj、yj、zj为步骤4中所述测量系统300记录的位置信息,为步骤5中所述测量系统300记录的n个位置信息所得的集群中心的位置坐标,具体的,式中xi、yi、zi为步骤5中所述测量系统300记录的相应的位置信息。
33.在本实施例中,在所述步骤4和步骤5中,控制所述机械臂带动所述位置读取装置102移动,且在移动过程中,控制所述位置读取装置102的位姿不变,具体做法如下:
34.步骤101、所述上位机接收机械臂传来的状态信息,该状态信息中包含了机械臂当前的位姿信息,将机械臂当前的位姿信息转换为4*4矩阵作为机械臂到位置读取装置的第一位姿转换矩阵,b=trans(e,b)*e,其中b表示位置读取装置坐标系,e表示机械臂坐标系,trans(e,b)表示第一位姿转换矩阵。
35.步骤102、所述上位机从控制单元202获取所述位置读取装置102在磁场发生器坐标系下的第二位姿转换矩阵,n=trans(b,n)*b,其中b表示位置读取装置坐标系,n表示磁场发生器坐标系,trans(b,n)表示第二位姿转换矩阵;通过第二位姿转换矩阵得到位置读取装置102在磁场发生器坐标系下的坐标作为当前位置坐标,所述当前位置指位置读取装置102当前停留的位置。
36.步骤103、将当前位置到目标位置的向量转换为4*4平移矩阵,其中目标位置为位置读取装置102将要移动到的位置;目标位置坐标是磁场发生器坐标系下的坐标,通过第二位姿转换矩阵trans(b,n)转换得到相对应的位置读取装置坐标系下的坐标,再通过第一位姿转换矩阵trans(e,b)转换得到相对应的机械臂坐标系下的坐标,控制机械臂运动到相应位置,使位置读取装置102移动到目标位置。
37.步骤104、当位置读取装置102移动完成后,再次获得位置读取装置102的当前位置,与预先设定的目标位置相比较,判断位置读取装置102是否移动到位;如果否,则循环步骤101~103。还可以设定循环次数的上限,目的是为了避免机械臂在某些位姿因关节转动受限,无法完全符合移动要求的情况。
38.在本技术中,测量的范围需要覆盖尽可能大的磁场范围。在整个测量过程中,因电磁导航系统200需要跟踪位置读取装置102,并对位置读取装置102的位置进行实时调整,所以位置读取装置102需要保持在磁场发生器201产生的磁场范围内。所述位置读取装置102在机械臂的带动下到达各个目标点时,所述测量球101需要在测量装置301的测量视野范围内。
39.本技术所涉及的电磁导航引导下的机械臂定位误差测量方法具有测量准确度高、测量效率高的优点,其能有效的检测电磁导航系统的定位精度。
40.以上所述,仅为本技术较佳的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,根据本技术的技术方案及其
构思加以等同替换或改变,都应涵盖在本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1