一种三维B型超声成像方法与装置
本发明涉及无线光通信、激光测距、陀螺仪定位和图像处理领域,具体为b型超声检测提供更为直观的三维影像应用。
背景技术:
1、以灰阶即亮度(brightness)模式形式来诊断疾病的称“二维显示”,因亮度第一个英文字母是b,故称b超,又称二维超声或灰阶超声;b型超声超声波成像的仪器用于各种检查,就是目前所知的超声波检查的方式与设备。如针对人体的非手术的诊断性检查,一般在临床应用方面。对受检者无痛苦、无损伤、无放射性。b型超声检查的范围很广,可涉及1腹部检查:包括肝、胆、胰、脾及腹腔等;2妇科检查;3泌尿系检查;4体表肿物及病变;5心脏及四肢血管检查。b型超声可以清晰地显示各脏器及周围器官的各种断面像,由于图像富于实体感,接近于解剖的真实结构,所以应用超声检查可以早期明确诊断。
2、但现在的b型超声也有其难以克服的局限性:由于反射法中发生多次重复反射以及旁瓣干扰出现假反射现象,因此有时易造成误诊。切片式的图片也不利于医生的分析和诊断,容易造成误诊。因此出现了一系列三维b超成像技术。
3、cn 201911385603.7公开了线阵扫描三维成像b超探头,包括探头外壳、设置在探头外壳上的透声罩,所述探头外壳内部设有支架,所述支架上固定设置步进电机,所述步进电机上设有探头传动机构,所述探头传动机构上固定设置两维超声声头,且两维超声声头在探头传动机构的带动下沿直线方向进行往复运动。通过两维超声成像切面的直线运动实现线阵三维扫描,大幅度提升三维超声成像品质。
4、cn201110310055.9三维b超检测装置包括fpga模块、显示器模块、硬盘、鼠标,键盘模块、微处理器。所述fpga模块用于三维b超数据的采集及数据的初级处理;所述显示器模块用于图像信息的显示。
5、cn200910250070.1公开一种实现盘形扫描的三维b超装置,推力球轴承一、外套一端、推力球轴承二和螺母顺序连接且均固定在外壳内层的外壁,电机一穿过外壳内层与光电编码器一和联轴片一顺序连接,传动杆两端分别与联轴片一和外套连接;外套另一端部固定于支撑片;电机固定套一端与支撑片连接;电机二穿过电机固定套与联轴片二连接,电机二与联轴片二之间设有光电编码器二,超声传感器固定在联轴片二上且与控制线板连接;控制线板与程序控制器连接,用于调整和控制电机一和电机二的转速,外壳外层容纳推力球轴承一、外套、推力球轴承二、电机一、联轴片一、传动杆、光电编码器一。
6、现有技术仍不能完全实现三维成像,因此本发明采用精度较高的激光定位系统和图像处理技术,将原来的二维切片式图片变为三维整体式图像,可以用于医疗,方便医生分析和诊断,也可以用于其它b超检测。
技术实现思路
1、本发明目提出一种采用精度较高的激光定位系统和图像叠加技术,将原来的二维切片式图片变为三维整体式图像,尤其是将激光测距技术和陀螺仪测量扭转角度的技术应用于b超得到b超三维整体式图片。
2、本发明的详细技术方案如下:一种三维b型超声成像装置,三维b型超声成像方法的原理:b超探头上安装的陀螺仪,脉冲激光测距仪通过对四个角和监测点发射激光共五个定位监测点的监测;利用体元模型法,将三维物体划分为依次排列的小立方体,一个小立方体就是一个体元;任一体元(v)用中心坐标(x,y,z)即xi,yi,zi确定,x,y,z分别为被假定为区间中的整数。一定数目的体元按相应的空间位置排列即可构成三维立体图像。
3、本发明三维超声成像方法,基于激光测距、陀螺仪定位系统和b型超声装置,b型超声装置逐点得到的图像,经整合或逐片存储切片式图像、依b型超声探头位置与角度叠加生成三维图像。
4、可以准确生成被检查者身体内被检查部分的三维b型超声图像,方便医生观察、分析和诊断。
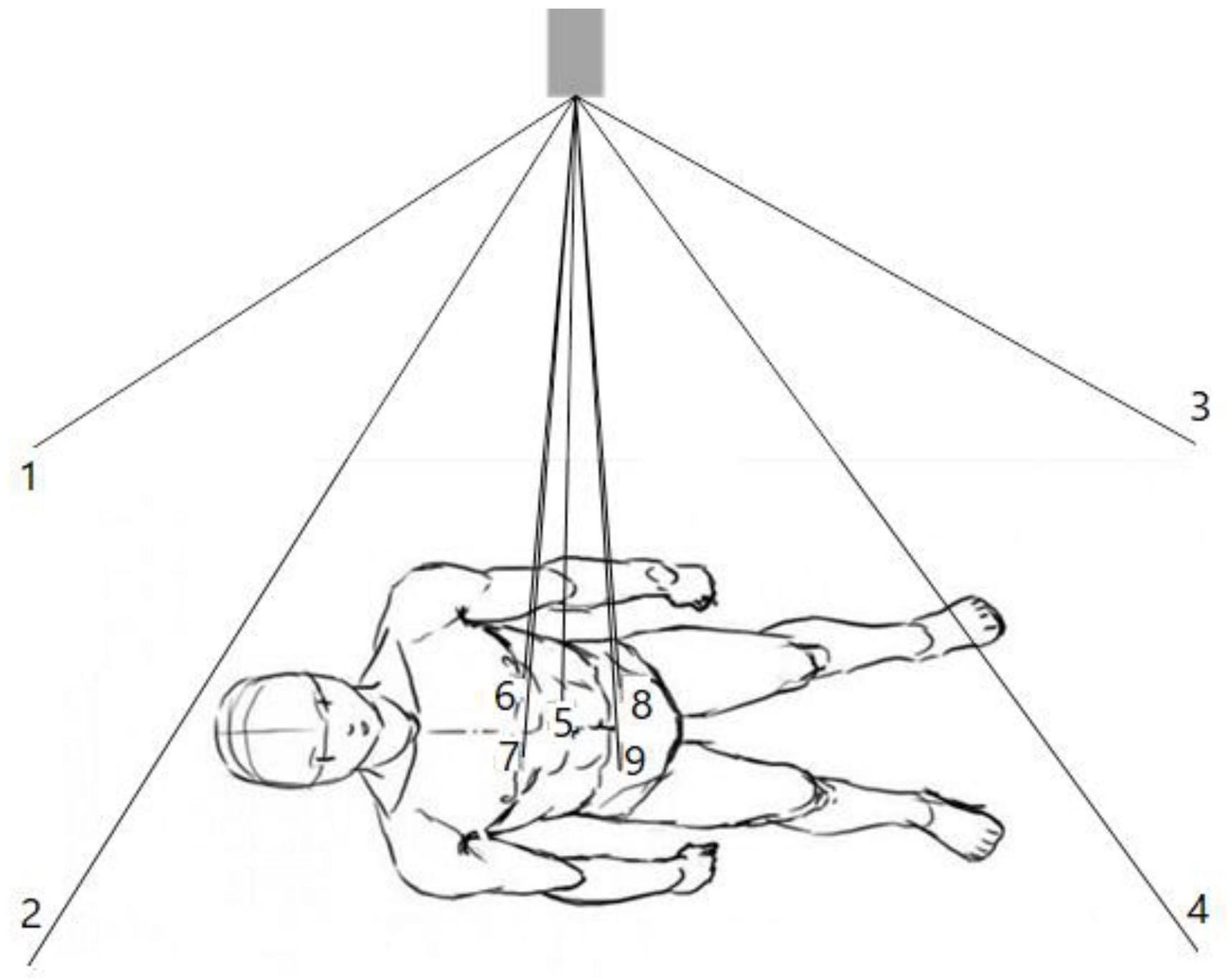
5、体元三维坐标的收集:利用脉冲激光测距仪向检测对象(如病人躺卧的床)的区域的四个角发射激光作为基准点,确保脉冲激光测距仪与检测对象位置(床)的位置相对不变;同时脉冲激光测距仪发射出激光束至人体检查部位上的定位点,通过b超探头的扫描按压过程,人体被检查部位的皮肤会有不同程度的起伏,脉冲激光测距仪通过对四个角和检测部位发射激光束共五个定位点的监测;脉冲激光测距仪得出激光探头分别与五个监测点间的距离;计算机系统会根据脉冲激光探测的五个监测点的不同距离,计算出b超探头扫描位置的(x1,y1,z1)坐标;此时b超探头发射超声波探测出检测对象(人体)内部(器官)的二维切面截图,探测出的扇形切面截图大小是固定的。b超探头发射超声波探头在不同位置探测出检测对象(人体)内部(器官)的不同的二维切面截图叠加构成三维的成像;二维平动至不同的检测点并在每个检测点上下垂直运动到不同的检测点,则至不同的体元的检测,直到不同的体元构成一个检测区域的三维图像。
6、在这个检测点上,b超探头上安装的陀螺仪会随着探头的偏转而监测出偏转的角度。固定的扇形扫描区域和偏转的角度,从而算出器官切片图片上每个体元的三维坐标(xn,yn,zn)。
7、体积元叠加:b超探头的扫描包括平移法和旋转法,平移法是b超探头在平移过程中,每隔一定的距离记录一组二维切面数据;旋转法是b超探头在一个位置旋转过程中,每转过一定的角度记录一组二维切面数据。通过大量二维切面数据的累计,计算机系统会进行运算,计算出所要检查器官内部每一小体积元的三维坐标,并将数据进行存储和运算。根据三维坐标的顺序,依次排列体积元,体积元的累计最终形成所要检查器官的三维的影像。
8、具体包括以下步骤:
9、步骤1、激光器置于病床正上方,开启激光探头发射基准光到床的四个角,作为系统的定位基准。在人体上贴几个标签,用于监控人体呼吸过程中的起伏状态。具体监控过程如下:医生手持b型超声探头对被检查者需检查的部位进行扫描,同时激光器会向不同定位点发射激光束于人体之上,根据人体皮肤的起伏情况,测出激光反射的时间,计算出探头距离人体表面各标签的距离,从而定位出b超探头扫描过被检查者检查部位的三维位置。
10、步骤2、在b型超声探头手柄上安装陀螺仪,陀螺仪用来确定b型超声探头的转动,给原本确定的三维定位坐标增加转动角度的参量,使器官体积元的定位更加准确。
11、步骤3、激光测距系统和陀螺仪时时监测人体呼吸时身体的起伏状态和b型超声探头按压在人体上人体表面皮肤的起伏状态,两者同时监测得到b型超声探头扫描在人体上的具体位置和b型超声探头偏转过的角度,根据监测的具体位置和偏转角度,计算机系统会通过运算并记录器官各体元的三维坐标并保存此处的器官体元图像。
12、步骤4、医生手持b型超声探头缓慢多次扫描过需要检查的部位,计算机系统会记录所有扫描过位置的二维扇形切片图片,随后计算机系统给予每个二维切面数据内每个体元一个具体的三维坐标,体元叠加系统会将不同位置、不同角度的体元按照顺序的组合,将大量二维切面数据的体元进行逐一排列和叠加处理,最终由大量二维切片图片经过一定的组合顺序叠加而形成三维的整体器官影像。
13、步骤5、医生根据最终生成的三维的整体器官影像进行病情的诊断。
14、进一步的,探头发射激光,当检测不到人体时,激光自动关闭,防止造成资源的浪费。
15、进一步的,利用电脑程序可将组成的三维的整体器官影像分成多张器官二维切面数据图片,可类似于抽抽屉一样将不同位置的二维切面数据图片抽出,从整体和切面式两方面进行诊断,增加诊断的准确率。
16、本发明3d结果系用二维信号一片一片叠加合成的,且是根据系统实验数据合成的。
17、本发明采用上述技术方案,能产生如下有益效果:
18、本发明通过激光和陀螺仪定位以及图片叠加原理,解决了原本医生只能观察b型超声切片的问题,医生可通过三维的整体器官影像实现任意平面重建,结合切片和3d结果进行诊断,增加诊断的准确率。相较于医院现有b型超声形式,本发明可更加全面、准确展示被检查部分的三维图像,同时,相较于费用较高的ct拍片方式,本发明的费用更低,可适用于更广大人群。
- 还没有人留言评论。精彩留言会获得点赞!