磁强计定位装置、脑磁定位系统及定位方法
1.本发明涉及磁力空间定位技术领域,特别涉及一种磁强计定位装置、脑磁定位系统及定位方法。
背景技术:
2.脑磁图(meg)是一种非侵入式测量神经元放电在颅外所产生磁场的脑功能成像技术。脑磁图(meg)兼具高时间和高空间分辨率,使得脑磁图(meg)在脑科学研究和脑疾病诊断中能够发挥重要作用。现有技术中小型化光泵原子磁强计(opm)具有高灵敏度、低成本、灵活轻便的优势,正在逐渐取代传统超导量子干涉器件,成为新一代脑磁图(meg)的核心弱磁探测元件。
3.脑磁图(meg)能实时记录脑磁随时间变化的波形,若已知磁强计阵列中每一个探测器的相对位置,就能获得颅外脑磁的空间分布。将颅外脑磁空间分布与大脑结构像匹配后,在合适的源模型下,就能反解出颅内产生活动的神经元位置,这一过程称为溯源分析。脑磁图(meg)的溯源分析技术可用于研究包括脑的自发和诱发活动在内的多种脑神经活动过程,在临床上用于癫痫等病灶的定位。
4.现有技术中所采用的小型化光泵原子磁强计(opm)为了便于定位,其多为固定式结构。小型化光泵原子磁强计(opm)使用时通常以单通道进行封装,然后以多通道构成阵列进行脑磁测量。但在脑磁图(meg)实际测量过程中,不同人员的头围大小不同,由于固定式的小型化光泵原子磁强计(opm)难以调整,导致小型化光泵原子磁强计(opm)与待测人员的头皮间存在较大间隙。脑磁信号强度会随着测量距离增加而快速衰减,因此该间隙会严重削弱脑磁图(meg)的信噪比。若不固定opm阵列使其能紧贴待测人员头皮,则在脑磁图(meg)扫描期间,小型化光泵原子磁强计(opm)会随着待测人员的头部一起运动,导致难以精准定位每个小型化光泵原子磁强计(opm)在颅外的具体空间位置。
技术实现要素:
5.为了克服现有技术的上述缺陷,本发明实施例所要解决的技术问题是提供了一种磁强计定位装置、脑磁定位系统及定位方法,用于适应不同人员的测量需要、以及提高脑磁图的测量精度。
6.本发明的上述目的可采用下列技术方案来实现,本发明提供了一种磁强计定位装置,包括:
7.头盔,具有头部容纳腔;
8.设置在所述头盔上的导向结构,所述导向结构包括具有取向的至少一个导向部;
9.可滑动地设置在各所述导向部上的磁强计,所述磁强计具有可插入所述头部容纳腔的头部抵接端;以及
10.设置在所述导向部与所述磁强计之间的位移测量机构,所述位移测量机构能够测量所述磁强计在所述导向部上的实时位移距离。
11.在本发明的一较佳实施方式中,所述导向部设置有多个,多个所述导向部沿不同取向间隔设置在所述头盔上,各所述磁强计分别设置在各所述导向部上形成磁场探测阵列。
12.在本发明的一较佳实施方式中,所述位移测量机构包括设置在所述磁强计上的第一测距件以及设置在所述导向部上的第二测距件。
13.在本发明的一较佳实施方式中,所述位移测量机构为设置在所述导向部与所述磁强计之间的容栅传感器,所述容栅传感器包括设置在所述导向部上的动栅、以及设置在所述磁强计上的定栅,所述定栅沿所述磁强计的延伸方向设置形成所述第一测距件,所述动栅沿所述导向部的延伸方向设置形成所述第二测距件。
14.在本发明的一较佳实施方式中,所述磁强计包括光泵原子磁强计。
15.在本发明的一较佳实施方式中,所述导向部包括凸设在所述头盔上的opm插槽,所述光泵原子磁强计可滑动地插接在对应的所述opm插槽中。
16.在本发明的一较佳实施方式中,所述头盔为刚性结构,所述opm插槽固定在所述头盔上。
17.在本发明的一较佳实施方式中,所述磁强计定位装置还包括设置在所述头盔上的定位结构,所述定位结构包括多个定位标记,多个所述定位标记分别设置在所述头盔的不同位置。
18.本发明还提供了一种脑磁定位系统,包括:前述的磁强计定位装置;光学扫描模块,所述光学扫描模块用于获取所述头盔以及佩戴人员面部的三维图像;磁共振模块,所述磁共振模块用于获取佩戴人员基于磁共振结构像重建的面部图像以及基于所述磁共振结构像重建的大脑结构图像;以及计算模块,所述计算模块用于获取所述实时位移距离、所述三维图像以及所述大脑结构图像,计算各所述磁强计相对于所述大脑结构图像的实时空间位置。
19.本发明还提供了一种应用脑磁定位系统的定位方法,包括如下步骤:
20.通过位移测量机构获取各磁强计相对于头盔的实时位移距离;
21.通过光学扫描模块获取所述头盔以及佩戴人员面部的三维图像;
22.通过磁共振模块获取所述佩戴人员的磁共振结构像;
23.利用计算模块计算各所述磁强计相对于所述佩戴人员面部的三维图像的实时空间位置;
24.对所述佩戴人员面部的三维图像和基于所述磁共振结构像重建的面部图像进行面部配准处理;
25.利用所述计算模块计算各所述磁强计相对于基于所述磁共振结构像重建的大脑结构图像的实时空间位置。
26.在本发明的一较佳实施方式中,基于头盔建立第一坐标系,其中,所述第一坐标系为三维坐标系;通过位移测量机构获取各磁强计在所述第一坐标系下的实时位移距离;基于光学扫描模块建立第二坐标系;通过所述光学扫描模块获取在所述第二坐标系下的所述头盔以及佩戴人员面部的三维图像,其中,所述三维图像包括以灰度值表示的被扫描物体的亮度信息、以及根据被扫描物体形状重建的三维点云信息和点云连接构成的面片信息;基于磁共振模块建立第三坐标系;通过所述磁共振模块获取在所述第三坐标系下的所述佩
戴人员的磁共振结构像,其中,所述磁共振结构像包括基于所述磁共振结构像重建的面部图像、以及基于所述磁共振结构像重建的大脑结构图像。
27.在本发明的一较佳实施方式中,所述利用计算模块计算各所述磁强计相对于所述佩戴人员面部的三维图像的实时空间位置包括如下步骤:
28.基于所述头盔上的多个定位标记,获取各所述定位标记在所述第一坐标系中的第一位置坐标、以及各所述定位标记在所述第二坐标系中的第二位置坐标;
29.通过点云配准算法对所述第一位置坐标与所述第二位置坐标进行配准处理,计算获得第一仿射变换矩阵;
30.基于所述第一仿射变换矩阵,将所述三维图像转换至所述第一坐标系,利用计算模块计算各所述磁强计相对于所述佩戴人员面部的三维图像的实时空间位置。
31.在本发明的一较佳实施方式中,所述对所述佩戴人员面部的三维图像和所述基于所述磁共振结构像重建的面部图像进行面部配准处理包括如下步骤:
32.通过所述佩戴人员面部的三维图像获取第一快速点特征直方图,通过所述基于所述磁共振结构像重建的面部图像获取第二快速点特征直方图;
33.基于所述第一快速点特征直方图筛选第一全局特征点集,基于所述第二快速点特征直方图筛选第二全局特征点集;
34.通过点云配准算法对所述第一全局特征点集和所述第二全局特征点集进行配准,计算获得第二仿射变换矩阵;
35.基于所述第二仿射变换矩阵,对所述佩戴人员面部的三维图像和所述基于所述磁共振结构像重建的面部图像进行面部配准处理。
36.在本发明的一较佳实施方式中,在所述对所述佩戴人员面部的三维图像和所述基于所述磁共振结构像重建的面部图像进行面部配准处理之后,还包括步骤:
37.通过点对点的迭代最近邻算法优化所述佩戴人员面部的三维图像和所述基于所述磁共振结构像重建的面部图像的配准结果,获得第三仿射变换矩阵。
38.在本发明的一较佳实施方式中,所述利用计算模块计算各所述磁强计相对于所述基于所述磁共振结构像重建的大脑结构图像的实时空间位置包括如下步骤:
39.基于所述第三仿射变换矩阵和所述第一仿射变换矩阵,将处于所述第三坐标系下的所述大脑结构图像转换至所述第一坐标系,通过所述计算模块计算获得各所述磁强计相对于所述大脑结构图像在所述第一坐标系中的实时空间位置。
40.本发明的技术方案具有以下显著有益效果:
41.该磁强计定位装置使用时,将头盔佩戴在待测人员的头部,通过多个沿不同取向设置在头盔上的磁强计能够组成磁场探测阵列,利用磁场探测阵列能够测量佩戴人员的脑磁图。
42.在各磁强计使用过程中,由于磁强计可滑动地设置在导向部上,使得各磁强计均具有位置调节能力。通过控制各磁强计沿导向部滑动,能够将各磁强计的头部抵接端抵接在待测人员的头皮上,使得磁场探测阵列能够适用于不同的头围大小,从而满足不同人员的脑磁图测量需要。并且,由于各磁强计的头部抵接端均能够贴合在佩戴人员的头皮上,还消除了磁强计与佩戴人员头部之间的缝隙,提高了磁强计所测量的脑磁图的信噪比,具有更好的使用效果。
43.通过将导向结构设置在头盔的设定位置,能够获知各导向部相对于头盔的空间位置,从而通过设置在头盔上的定位结构能够快速地获取头盔及导向结构的空间位置。当磁强计沿导向部运动时,利用位移测量机构能够测量出磁强计在导向部上的实时位移距离,从而能够快速地获取各磁强计相对于导向部的实时空间位置,并计算出各磁强计相对于头盔的实时空间位置。并且基于头盔与佩戴人员头部的相对位置,从而能够快速地计算出各磁强计相对于佩戴人员头部的实时空间位置,还能够快速地将脑磁图与佩戴人员头部进行空间配准,具有更快的空间配准速度、以及更高的空间配准精度。
附图说明
44.为了更清楚地说明本发明实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
45.在此描述的附图仅用于解释目的,而不意图以任何方式来限制本发明公开的范围。另外,图中的各部件的形状和比例尺寸等仅为示意性的,用于帮助对本发明的理解,并不是具体限定本发明各部件的形状和比例尺寸。本领域的技术人员在本发明的教导下,可以根据具体情况选择各种可能的形状和比例尺寸来实施本发明。
46.图1为磁强计定位装置的一种立体结构示意图;
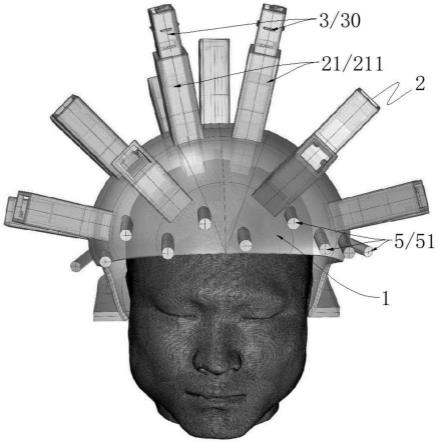
47.图2为磁强计定位装置处于佩戴状态的结构示意图;
48.图3为容栅传感器的一种结构示意图;
49.图4为磁强计插接在opm插槽中的结构示意图;
50.图5为磁强计与大脑结构图像之间的实时空间位置示意图。
51.以上附图的附图标记:
52.1、头盔;11、头部容纳腔;
53.2、导向结构;21、导向部;211、opm插槽;
54.3、磁强计;30、光泵原子磁强计;31、头部抵接端;
55.4、位移测量机构;40、容栅传感器;41、第一测距件;411、定栅;42、第二测距件;421、动栅;422、接收极板;
56.5、定位结构;51、定位标记。
具体实施方式
57.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
58.实施方式一
59.请结合参阅图1所示的实施例,本发明实施例中提供了一种磁强计定位装置,该磁强计定位装置包括:头盔1,具有头部容纳腔11;设置在头盔1上的导向结构2,导向结构2包括具有取向的至少一个导向部21;可滑动地设置在各导向部21上的磁强计3,磁强计3具有
可插入头部容纳腔11的头部抵接端31;以及设置在导向部21与磁强计3之间的位移测量机构4,位移测量机构4能够测量磁强计3在导向部21上的实时位移距离。
60.整体上,该磁强计定位装置使用时,如图2所示的实施例,将头盔1佩戴在待测人员的头部,通过多个沿不同取向设置在头盔1上的磁强计3能够组成磁场探测阵列,利用磁场探测阵列能够测量佩戴人员的脑磁图。在各磁强计3使用过程中,由于磁强计3可滑动地设置在导向部21上,使得各磁强计3均具有位置调节能力。通过控制各磁强计3沿导向部21滑动,能够将各磁强计3的头部抵接端31抵接在待测人员的头皮上,使得磁场探测阵列能够适用于不同的头围大小,从而满足不同人员的脑磁图测量需要。并且,由于各磁强计3的头部抵接端31均能够贴合在佩戴人员的头皮上,还消除了磁强计3与佩戴人员头部之间的缝隙,提高了磁强计3所测量的脑磁图的信噪比,具有更好的使用效果。
61.通过将导向结构2设置在头盔1的设定位置,能够获知各导向部21相对于头盔1的空间位置。当磁强计3沿导向部21运动时,利用位移测量机构4能够测量出磁强计3在导向部21上的实时位移距离,从而能够快速地获取各磁强计3相对于导向部21的实时空间位置,并计算出各磁强计3相对于头盔1的实时空间位置。并且基于头盔1与佩戴人员头部的相对位置,还能够快速地计算出各磁强计3相对于佩戴人员头部的实时空间位置,从而能够快速地将脑磁图与佩戴人员头部进行空间配准,具有更快的空间配准速度、以及更高的空间配准精度。
62.在本发明的实施方式中,导向部21设置有多个,多个导向部21沿不同取向间隔设置在头盔1上,各磁强计3分别设置在各导向部21上形成磁场探测阵列。
63.通过多个不同取向设置的导向部21,多个导向部21上均可安装磁强计3,利用多个不同取向的磁强计3能够形成磁场探测阵列,进而能够对佩戴人员大脑的不同区域进行脑磁测量。其中,取向是指:为了满足脑磁的测量需要,在头盔1上所选取的导向部21的设计方向。设计人员可根据脑磁测量需要确定各导向部21的取向,在此不作具体限制。
64.在一个具体实施例中,可在全部的导向部21上均设置磁强计3,利用全部的磁强计3形成磁场探测阵列,用于对佩戴人员进行脑磁测量。
65.在另外的实施例中,如图2所示的实施例,可在部分的导向部21上设置磁强计3,利用部分的磁强计3形成磁场探测阵列,用于对佩戴人员进行脑磁测量。
66.设计人员可根据脑磁测量需要确定各导向部21及磁强计3的安装方向、安装位置以及安装数量,在此不做具体限制,
67.在本发明的实施方式中,位移测量机构4包括设置在磁强计3上的第一测距件41以及设置在导向部21上的第二测距件42。
68.具体的,第一测距件41和第二测距件42可贴合设置,通过利用第一测距件41和第二测距件42之间的相互运动,便于实时地测量出磁强计3在导向部21上的运动距离。
69.在本发明的实施方式中,如图3所示的实施例,位移测量机构4为设置在导向部21与磁强计3之间的容栅传感器40,容栅传感器40包括设置在磁强计3上的定栅411、以及设置在导向部21上的动栅421,定栅411沿磁强计3的延伸方向设置形成第一测距件41,动栅421沿导向部21的延伸方向设置形成第二测距件42。
70.容栅传感器40是一种由导电材料构成的栅格化极板,例如铜箔材料。容栅传感器40具有结构简单可靠、体积小、不易受环境干扰等优点。并且容栅传感器40工作时所产生的
数字信号电流较小,对磁强计3所产生的电磁干扰较小,可忽略不计。容栅传感器40的量程能够达到数十厘米,能够满足磁强计3的定位需要。
71.容栅传感器40包括动栅421和定栅411,动栅421与定栅411之间绝缘设置构成栅格化的电容结构。动栅421上具有由导电材质构成的接收极板422,动栅421通过接收极板422能够用于信号读出。其中,动栅421上可设置多组栅格,每组栅格的总数设置为4的倍数。每组动栅421对应定栅411上的一个栅格,即定栅411栅格的宽度为一组动栅421栅格总宽度的二分之一。
72.具体的,如图3所示的实施例,动栅421中每组栅格数为8,每个动栅421栅格的宽度设置为0.635mm,每个定栅411栅格的宽度设置为2.04mm。
73.在另外的实施例中,设置人员还可根据测量需要调整动栅421和定栅411的尺寸规格,在此不作具体限制。
74.在本发明的实施方式中,磁强计3包括光泵原子磁强计30。光泵原子磁强计30具有高灵敏性、低成本、灵活轻便等优点,能够满足脑磁探测的需要。具体的,光泵原子磁强计30呈小型化设置在导向部21上,小型化光泵原子磁强计30便于安装和使用。
75.在另外的实施例中,设计人员还可采用其它种类的磁强计3替代光泵原子磁强计30,在此不作具体限制。
76.在本发明的实施方式中,导向部21包括凸设在头盔1上的opm插槽211,光泵原子磁强计30可滑动地插接在对应的opm插槽211中。
77.具体的,如图2和图4所示的实施例中,opm插槽211呈筒形设置在头盔1上。通过设置多个具有不同取向的opm插槽211能够分别测量大脑的不同区域,从而获得全脑覆盖的脑磁图,提高脑磁图空间分辨率。
78.并且通过opm插槽211还能够限制光泵原子磁强计30的运动路径,并防止光泵原子磁强计30在使用过程中出现晃动的问题,提高了光泵原子磁强计30运动的稳定性。
79.在本发明的实施方式中,头盔1为刚性结构,opm插槽211固定在头盔1上。通过将头盔1设置为刚性结构,能够防止头盔1在使用过程中出现形变,使得头盔1能够保持固定形状。
80.通过将各opm插槽211按照设定方向固定设置在头盔1上,便于确定各opm插槽211相对于头盔1的空间位置。当光泵原子磁强计30在opm插槽211中运动时,通过容栅传感器40能够获取光泵原子磁强计30在opm插槽211中的实时运动距离,从而计算出各光泵原子磁强计30相对于头盔1的实时空间位置。设计人员可根据使用需要确定头盔1的具体形状和大小,在此不作具体限制。
81.进一步地,在另外的实施例中,通过更换opm插槽211还能适配不同大小的磁强计3,具有更好的使用灵活性。
82.在本发明的实时方式中,如图1和图2所示的实施例,磁强计定位装置还包括设置在头盔1上的定位结构5,定位结构5包括多个定位标记51,多个定位标记51分别设置在头盔1的不同位置。
83.具体的,定位标记51为凸设在头盔1上的定位块,定位块呈圆柱形设置,定位块的顶部涂覆有光学镀层。在进行光学扫描时,光学镀层能够产生区别与其他物体的亮度值,从而便于快速捕获各定位标记51。设计人员可根据光学扫描需要确定光学镀层的材料,在此
不作具体限制。
84.通过将多个定位标记51按照设定位置设置在头盔1上,从而能够获得各定位标记51相对于头盔1的空间位置。当光学扫描到多个设置在头盔1不同位置的定位标记51时,利用多个定位标记51点作为参照物,能够反推出头盔1所处的空间位置。
85.实施方式二
86.本发明实施例中还提供了一种脑磁定位系统,该脑磁定位系统包括:如实施方式一中的磁强计定位装置;光学扫描模块,光学扫描模块用于获取头盔1以及佩戴人员面部的三维图像;磁共振模块,磁共振模块用于获取佩戴人员基于磁共振结构像重建的面部图像以及基于磁共振结构像重建的大脑结构图像;以及计算模块,计算模块用于获取实时位移距离、三维图像以及大脑结构图像,计算各磁强计3相对于大脑结构图像的实时空间位置。
87.该磁强计定位装置的具体结构、工作原理和有益效果与前述实施例中相同,在此不再赘述。该脑磁定位系统通过运用磁强计定位装置能够快速地实时定位各磁强计3、以及完成各磁强计3与大脑结构图像的空间配准过程。
88.具体的,磁强计定位装置包括容栅传感器40,利用容栅传感器40能够快速测量出光泵原子磁强计30在opm插槽211中的实时运动距离,测量精度能够达到0.1mm。
89.光学扫描模块包括扫描仪,利用扫描仪能够对头盔1及佩戴人员面部进行扫描,能够快速地获取头盔1以及佩戴人员面部的三维图像。通过光学扫描模块能够在5s内完成采样,并且三维图像的精度能够达到0.02mm。设计人员可根据光学扫描需求确定扫描仪的种类,在此不做具体限制。
90.通过将磁强计定位装置与光学扫描模块相结合,能够在脑磁图(meg)扫描前,将三维图像与各光泵原子磁强计30之间的空间配准时间缩短至5s以内。
91.磁共振模块包括人体磁共振成像仪,利用人体磁共振成像仪对佩戴人员的头部进行扫描,能够快速地获得磁共振结构像,基于磁共振结构像能够重建出佩戴人员的面部图像和大脑结构图像。设计人员可根据磁共振需要确定人体磁共振成像仪的种类,在此不做具体限制。
92.通过将计算模块与光学扫描模块与磁共振模块相结合,能够在3s内完成光学扫描模块所采集的佩戴人员面部的三维图像和基于磁共振结构像重建出的佩戴人员的面部图像之间的图像配准运算。
93.通过磁强计定位装置能够快速获得各磁强计3相对于头盔1的实时空间位置。通过光学扫描模块能够快速获得佩戴人员面部与头盔1之间的空间位置。通过磁共振模块能够快速获得佩戴人员面部与大脑结构图像之间的空间位置。基于点云配准算法及全局图像配准算法,利用计算模块能够快速计算出各磁强计3相对于大脑结构图像的实时空间位置,如图5所示的实施例,从而大幅缩短了被测人员的准备时间,改善了脑磁图(meg)检测体验。
94.实施方式三
95.本发明实施例中还提供了一种应用脑磁定位系统的定位方法,包括如下步骤:
96.步骤101:通过位移测量机构4获取各磁强计3相对于头盔1的实时位移距离;
97.步骤102:通过光学扫描模块获取头盔1以及佩戴人员面部的三维图像;
98.步骤103:通过磁共振模块获取佩戴人员的磁共振结构像;
99.步骤104:利用计算模块计算各磁强计3相对于佩戴人员面部的三维图像的实时空
间位置;
100.步骤105:对佩戴人员面部的三维图像和基于磁共振结构像重建的面部图像进行面部配准处理;
101.步骤106:利用计算模块计算各磁强计3相对于基于磁共振结构像重建的大脑结构图像的实时空间位置。
102.在本发明的实施方式中,通过位移测量机构4获取各磁强计3相对于头盔1的实时位移距离包括如下步骤:
103.步骤1011:基于头盔1建立第一坐标系,其中,第一坐标系为三维坐标系。
104.通过光学扫描模块获取头盔1以及佩戴人员面部的三维图像包括如下步骤:
105.步骤1021:通过位移测量机构4获取各磁强计3在第一坐标系下的实时位移距离;基于光学扫描模块建立第二坐标系。通过光学扫描模块获取在第二坐标系下的头盔1以及佩戴人员面部的三维图像,其中,三维图像包括以灰度值表示的被扫描物体的亮度信息、以及根据被扫描物体形状重建的三维点云信息和点云连接构成的面片信息。
106.通过磁共振模块获取佩戴人员的磁共振结构像包括如下步骤:
107.步骤1031:基于磁共振模块建立第三坐标系。通过磁共振模块获取在第三坐标系下的佩戴人员的磁共振结构像,其中,磁共振结构像包括基于磁共振结构像重建的面部图像、以及基于磁共振结构像重建的大脑结构图像。
108.在本发明的实施方式中,利用计算模块计算各磁强计3相对于佩戴人员面部的三维图像的实时空间位置包括如下步骤:
109.步骤1041:基于头盔1上的多个定位标记51,获取各定位标记51在第一坐标系中的第一位置坐标、以及各定位标记51在第二坐标系中的第二位置坐标;
110.步骤1042:通过点云配准算法对第一位置坐标与第二位置坐标进行配准处理,计算获得第一仿射变换矩阵;
111.步骤1043:基于第一仿射变换矩阵,将三维图像转换至第一坐标系,利用计算模块计算各磁强计3相对于佩戴人员面部的三维图像的实时空间位置。
112.在本发明的实施方式中,对佩戴人员面部的三维图像和基于磁共振结构像重建的面部图像进行面部配准处理包括如下步骤:
113.步骤1051:通过佩戴人员面部的三维图像获取第一快速点特征直方图,通过基于磁共振结构像重建的面部图像获取第二快速点特征直方图;
114.步骤1052:基于第一快速点特征直方图筛选第一全局特征点集,基于第二快速点特征直方图筛选第二全局特征点集;
115.步骤1053:通过点云配准算法对第一全局特征点集和第二全局特征点集进行配准,计算获得第二仿射变换矩阵;
116.步骤1054:基于第二仿射变换矩阵,对佩戴人员面部的三维图像和基于磁共振结构像重建的面部图像进行面部配准处理。
117.在本发明的实施方式中,在对佩戴人员面部的三维图像和基于磁共振结构像重建的面部图像进行面部配准处理之后,还包括步骤:
118.步骤1055:通过点对点的迭代最近邻算法优化佩戴人员面部的三维图像和基于磁共振结构像重建的面部图像的配准结果,获得第三仿射变换矩阵。
119.在本发明的实施方式中,利用计算模块计算各磁强计3相对于基于磁共振结构像重建的大脑结构图像的实时空间位置包括如下步骤:
120.步骤1061:基于第三仿射变换矩阵和第一仿射变换矩阵,将处于第三坐标系下的大脑结构图像转换至第一坐标系;
121.步骤1062:通过计算模块计算获得各磁强计3相对于大脑结构图像在第一坐标系中的实时空间位置。
122.具体的,以头盔1固定放置在水平设置的扫描床为例。将头盔1的中心设置为原点,基于该原点建立三维坐标系,即第一坐标系。第一坐标系以扫描床的水平面为x-y平面,其中佩戴人员的头脚所处方向为x轴,以垂直于扫描床的方向为z轴方向。
123.各定位标记51在头盔1坐标中的第一位置坐标设为各定位标记51在第二坐标系中的第二位置坐标设为p(p1,p2,p3…
pn),对第一位置坐标和第二位置坐标进行配准,获得第一仿射变换矩阵trans1。
124.基于第一仿射变换矩阵trans1对佩戴人员面部的三维图像进行旋转和平移,将佩戴人员面部的三维图像转换至第一坐标系,从而获得各磁强计3相对于佩戴人员面部的三维图像的空间位置。
125.首先计算佩戴人员面部的三维图像和基于磁共振结构像重建的面部图像的快速点特征直方图(fast-point-feature-histogram,fpfh),获得第一快速点特征直方图和第二快速点特征直方图。在两个直方图中分别选取具有相似全局特征的点集,第一快速点特征直方图中选取的点集为d(d1,d2,d3…dn
),第二快速点特征直方图中选取的点集为n为选取的点总数。
126.通过点云配准算法计算对d(d1,d2,d3…dn
)和进行配准计算,获得两个点集之间的最优第二仿射变换矩阵trans2。
127.基于第二仿射变换矩阵trans2。对佩戴人员面部的三维图像进行旋转和平移,使佩戴人员面部的三维图像和基于磁共振结构像重建的面部图像大致重合。然后,通过点对点的迭代最近邻算法(iterative-closest-points,icp)优化佩戴人员面部的三维图像和基于磁共振结构像重建的面部图像的配准结果,从而获取更加精确的第三仿射变换矩阵trans3。
128.通过第三仿射变换矩阵和第一仿射变换矩阵,能够将大脑结构图像转换至第一坐标系中,进而获得各磁强计3相对于大脑结构图像在第一坐标系中的实时空间位置。
129.在本实施方式中,容栅测量位移原理如下:
130.设动栅421一组栅格总数为4n(n为正整数),随着动栅421和定栅411的相对移动,单个栅格对应的电容值呈周期性变化,若电容的动栅421一端接恒压u
in
,则定栅411一端对地电压u
out
也呈周期性变化,u
out
的计算公式如下:
[0131][0132]
其中,r为固定系数,与具体电容材质和尺寸相关。k
x
为空间角频率,若一组动栅421总宽度为l,则x为位移量。i为栅格的编号,从一侧到另一侧按顺序累加。
[0133]
每组动栅421上的4n个栅格与定栅411上的1个栅格构成4n个电容,若在电容的动
栅421一端接周期性振荡电压:
[0134][0135]
其中ω为电压振荡角频率,i为栅格的编号。由于电容的充放电过程,这4n个电容的另一端电压也产生周期性振荡,且累加在定栅411的1个栅格上。该周期性振荡电压可通过接收极板422读出,最终输出电压值为:
[0136][0137]
根据余弦函数和差角公式可知:
[0138][0139]
则
[0140]vout
=2nru0cos(ωt-k
x
x)
[0141]
从上式看出,通过读取输出电压的相位k
x
x就能解出位移量x。
[0142]
在本实施方式中,磁强计3定位算法如下:
[0143]
设第一坐标系下opm插槽211轴向单位向量为a,磁强计3在opm插槽211中移动至基准点时,磁强计3在第一坐标系下的坐标为l。在脑磁测量过程中,通过容栅传感器40读出磁强计3实时位移量为d,则磁强计3在第一坐标系下的实时位置为l-da。
[0144]
在本实施方式中,点云配准算法如下:
[0145]
设定位标记51总数为n,分别计算第二坐标系中定位标记51集p(p1,p2,p3…
pn)和第一坐标系中定位标记51集的协方差矩阵,并提取协方差矩阵的特征向量(v1,v2,v3)和
[0146]
设点集p和p
*
的质心分别为c和c
*
,则两点集之间的近似仿射变换矩阵为:
其中t=c
*-rc。
[0147]
基于trans将p旋转平移得到在p
t
中选取距离最近的点与建立点对(i,j∈[1,n]),将p
t
重新排序后得到其中和为选取的点对(k∈[1,n])。
[0148]
计算点集ps与p
*
之间的最优仿射变换矩阵使得使得最小。令
[0149][0150]
对h进行奇异值分解得到uλv
t
,则r1=uv
t
,t1=c
*-r1c。
[0151]
在本实施方式中,fpfh提取方法如下:
[0152]
点特征直方图是一种全局特征,它通过参数化查询点和近邻点之间的空间差异,形成了一个多维直方图对点的近邻进行几何描述,从而区分具有不同几何体形状的点云。fpfh是一种点特征直方图的快速算法,具体流程为:
[0153]
对点云中任一点d,选取以d为圆心,r为半径内的k个近邻点。设d和某个近邻点d
′
的法向量分别为n和n
′
,计算这两点对应的darboux框架的向量(uvw):
[0154]
u=n
[0155]
v=u
×
(d
′‑
d)
[0156]
w=u
×v[0157]
计算特征三元组(α,φ,θ):
[0158]
α=v
·n[0159][0160]
θ=arctan(w
·n′
,u
·n′
)
[0161]
对每个近邻点d
′i(i∈[1,k]),分别计算特征三元组。将三元组中的每一个值划分为b个区间,一共有3b个区间,统计k组特征中α,φ,θ各自的分布,建立直方图,记为spfh(d)。
[0162]
对每个近邻点d
′j(j∈[1,k]),以其为圆心重新选取k个近邻点,计算d
′j与其近邻点的特征三元组(α,φ,θ),同样根据特征分布建立直方图,记为spfh(d
′j)。最终点d的点特征直方图为:
[0163][0164]
wj为权重因子,正比于d
′j与d之间的距离。
[0165]
在本实施方式中,icp算法如下所示:
[0166]
设基于磁共振结构像重建的面部图像中点云为s(s1,s2,s3…sp
),光学扫描获得的
佩戴人员面部的三维图像中点云为p和q分别为s和s
*
中点的总数,icp算法具体步骤为:
[0167]
在距离阈值下(通常为5mm),对s中每一点si(i∈[1,p]),以不重复的方式从s
*
中选取与其欧氏距离最近的将si与建立点对。
[0168]
根据对应关系将s和s
*
中被选取的点分别重新排列,构成两个新点集和且和构成一点对,n为点对总数。
[0169]
计算两点集之间的最优仿射变换矩阵使得使得最小。令
[0170][0171]
m和m
*
分别为sc和s
c*
质心,对h进行奇异值分解得到uav
t
,则r3=uv
t
,t3=m
*-r3m。
[0172]
基于trans3将s进行旋转和平移,替代原s。
[0173]
重复上述步骤,直到相邻两次迭代得到的变换矩阵之间相差比例小于预设值,通常为0.0001,输出最终的仿射变换矩阵trans3。
[0174]
披露的所有文章和参考资料,包括专利申请和出版物,出于各种目的通过援引结合于此。描述组合的术语“基本由
…
构成”应该包括所确定的元件、成分、部件或步骤以及实质上没有影响该组合的基本新颖特征的其他元件、成分、部件或步骤。使用术语“包含”或“包括”来描述这里的元件、成分、部件或步骤的组合也想到了基本由这些元件、成分、部件或步骤构成的实施方式。这里通过使用术语“可以”,旨在说明“可以”包括的所描述的任何属性都是可选的。多个元件、成分、部件或步骤能够由单个集成元件、成分、部件或步骤来提供。另选地,单个集成元件、成分、部件或步骤可以被分成分离的多个元件、成分、部件或步骤。用来描述元件、成分、部件或步骤的公开“一”或“一个”并不说为了排除其他的元件、成分、部件或步骤。
[0175]
本说明书中的各个实施例均采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似的部分互相参见即可。上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1