一种智能灸疗机器人及其实施方法与流程
1.本发明涉及智能艾灸设备的技术领域,具体涉及一种智能灸疗机器人及其实施方法。
背景技术:
2.艾灸疗法,也称灸法,因其能达到保健兼具美容或治疗的特色功效,符合现代人对治未病的需求,现已得到广泛关注和大量推广。艾灸对人体穴位局部的温热刺激,能增强局部血液循环合淋巴循环及组织代谢能力,其燃烧过程中产生的药性物质顺着穴位进入人体还可以调节人体平衡,恰好有增强人体免疫力的功能,灸疗的许多治疗作用都是通过调节人体免疫功能来实现的,这种作用具有双向调节的特性,如果太低则可以使其升高,太高则又可以让其降低。
3.艾灸的近红外光所提供的能量可以被人体所调控,为机体的活动提供了必要的能量,但是艾灸是通过点燃艾条或艾柱对人体穴位熏灸过程中存在很多的问题限制其发展,最重要的问题就是以下三点:1、艾灸过程中产生大量的烟雾,对人体呼吸道造成极大的伤害;2、艾灸过程中手持艾条悬空操作比较累,操作过程不能保证离穴位的准确性,造成艾灸过程麻烦;3、艾灸过程中火头温度比较高,容易烫伤用户造成安全事故。
4.此外,目前市场上的灸疗仪器自动化、智能化的程度都很低,需要耗费大量的人工操作,另外还不能标准化、准确化地实施灸疗操控,造成灸疗的成本高、扩展性差,因此,在艾灸领域亟需一款能解决以上问题的智能化艾灸设备。
5.然而,在灸疗过程中,产生的灸疗烟气比较大,通过现有的嗨帕过滤棉、活性炭过滤棉或静电吸附,存在既不能完全处理掉灸烟中焦油和有害气体的作用,又带来极大的清洗难题。另外现有技术中吸附和过滤处理灸疗烟气的能力很有限,不能适应逐步对累积灸烟的处理需求,也没有逐个针对灸烟中成分进行精准化处理消除的方案,这样就不能满足灸疗批量推广的需求,也不符合现代人的洁净生活需要。
6.因此,如何提供一种简易、高效、快捷、精准、安全的智能化灸疗机器人一体机及其实施处理方案是本领域亟待解决的技术问题。
技术实现要素:
7.(1)要解决的技术问题
8.本发明的目的在于克服现有技术的不足,适应现实需要,提供一种简易、高效、快捷、精准、安全的智能化灸疗机器人一体机及其实施处理方案,以解决上述技术问题。
9.(2)技术方案
10.为了实现本发明的目的,本发明所采用的技术方案为:
11.一种智能灸疗机器人,包括:探测型灸头机组、智能灸臂及机身机组;其中,
12.所述探测型灸头机组,包括:灸头外壳、灸材放置推进筒及检测传感器;所述灸头外壳,为中空腔体的包裹型壳体,底部开设灸疗辐射孔,底部在所述灸疗辐射孔周边壳壁上
设置传感器探测孔;顶部开设灸材放置孔,外壁设置智能灸臂装配凸台;
13.所述灸材放置筒,由外层到内层依次设置装配固定筒、隔热筒及限燃控制筒,底部均朝向所述灸疗辐射孔方向延伸;所述装配固定筒的翻边固定至所述灸头外壳;所述隔热筒通过悬空支架连接件的内翻脚连接至所述限燃控制筒的外壁;所述限燃控制筒,通过所述悬空支架连接件的外翻脚置于所述装配固定筒的所述翻边上,底部设置有灸材的限位卡爪,所述限位卡爪朝向所述限燃控制筒内腔方向延伸;
14.所述检测传感器,置于所述传感器探测孔内,朝向所述灸疗辐射孔的辐射方向;
15.所述智能灸臂,一端固定连接在所述灸臂装配凸台,另一端的基座固定装配在所述机身机组原点上支撑所述灸头机组;
16.所述机身机组,包括:机身外壳及智能控制器;所述机身外壳,为中空腔体外壳,内部容纳所述智能控制器及智能灸臂的驱动控制组件,外部设置所述智能控制器的控制器支撑架;所述智能控制器,置于所述控制器支撑架上,电连接至所述检测传感器及智能灸臂;
17.所述智能控制器,包括:灸疗穴位路径设置器、检测数据收集器、灸疗数据分析处理器、灸疗路径规划处理器及灸疗控制处理器;
18.所述灸疗穴位路径设置器,为预设人体穴位识别定位数据与灸疗需求数据的需求灸疗路径数据对照表的处理器;
19.所述检测数据收集器,与所述检测传感器及灸疗数据分析处理器相连接,为接收所述检测传感器的所述检测数据,并传输至所述灸疗数据分析处理器的存储处理器;
20.所述灸疗数据分析处理器,与所述灸疗路径规划处理器相连接,为根据所述检测数据,基于预设的穴位识别定位策略得到实时人体穴位识别定位数据的分析处理器;
21.所述灸疗路径规划处理器,与所述灸疗穴位路径设置器相连接,为根据所述实时人体穴位识别定位数据、灸疗需求数据及需求灸疗路径数据对照表得到实时需求灸疗路径数据的规划处理器;
22.所述灸疗控制处理器,与所述灸疗路径规划处理器及智能灸臂相连接,为根据所述实时需求灸疗路径数据,控制所述智能灸臂对准相应穴位施灸的控制处理器。
23.可选地,其中,该智能灸疗机器人,还包括:人体穴位定位器,与所述智能控制器相连接,为特异性标记的荧光打点器,通过特异性的荧光圈直径/荧光信号给不同穴位进行特异性识别设置的定位器。
24.可选地,其中,该智能灸疗机器人,还包括:人体穴位定位器,与所述智能控制器相连接,为视觉识别定位器,包括:全身图像摄像机、特定部位对比识别器、全身轮廓图像绘制处理器及预设部位校准器;为基于特定部位点搭建人体总轮廓绘制穴位定位图像的视觉识别定位穴位的处理器。
25.可选地,其中,该智能灸疗机器人,还包括:磁吸式挡灰网,在所述灸头外壳的所述灸疗辐射孔周边设置磁铁,所述磁吸式挡灰网边框对应位置内置磁铁,通过磁铁相吸将所述磁吸式挡灰网贴合至所述灸头外壳底部。
26.可选地,其中,该智能灸疗机器人,还包括:挡灰网放置台及自动点火槽;所述灸疗辐射孔周边设置的磁铁为吸网电控磁铁,电连接至所述智能控制器;挡灰网放置台,为底下设置搁网电控磁铁的挡灰网搁置台,电连接至所述智能控制器;
27.所述自动点火槽,为中间设置点火凸台,外围设置配合所述探测型灸头机组的放
置定位槽,使得所述灸材放置筒内灸材底部贴合所述点火凸台,所述点火凸台的开关电连接至所述智能控制器。
28.可选地,其中,该智能灸疗机器人,还包括:挡灰网放置台及自动刮灰槽;所述灸疗辐射孔周边设置的磁铁为吸网电控磁铁,电连接至所述智能控制器;挡灰网放置台,为底下设置搁网电控磁铁的挡灰网搁置台,电连接至所述智能控制器;
29.所述自动刮灰槽,为中间设置刮灰凸台,外围设置配合所述探测型灸头机组的放置定位槽,使得所述灸材放置筒内灸材底部贴合所述刮灰凸台,所述刮灰凸台为顶部呈喇叭口的刮灰片组成,所述刮灰片之间中空腔直径在所述灸材刮灰范围内。
30.另一方面,本发明还提供一种智能灸疗机器人的实施方法,该智能灸疗机器人,包括:探测型灸头机组、智能灸臂及机身机组;其中,
31.所述探测型灸头机组,包括:灸头外壳、灸材放置推进筒及检测传感器;所述灸头外壳,为中空腔体的包裹型壳体,底部开设灸疗辐射孔,底部在所述灸疗辐射孔周边壳壁上设置传感器探测孔;顶部开设灸材放置孔,外壁设置智能灸臂装配凸台;
32.所述灸材放置筒,由外层到内层依次设置装配固定筒、隔热筒及限燃控制筒,底部均朝向所述灸疗辐射孔方向延伸;所述装配固定筒的翻边固定至所述灸头外壳;所述隔热筒通过悬空支架连接件的内翻脚连接至所述限燃控制筒的外壁;所述限燃控制筒,通过所述悬空支架连接件的外翻脚置于所述装配固定筒的所述翻边上,底部设置有灸材的限位卡爪,所述限位卡爪朝向所述限燃控制筒内腔方向延伸;
33.所述检测传感器,置于所述传感器探测孔内,朝向所述灸疗辐射孔的辐射方向;
34.所述智能灸臂,一端固定连接在所述灸臂装配凸台,另一端的基座固定装配在所述机身机组原点上支撑所述灸头机组;
35.所述机身机组,包括:机身外壳及智能控制器;所述机身外壳,为中空腔体外壳,内部容纳所述智能控制器及智能灸臂的驱动控制组件,外部设置所述智能控制器的控制器支撑架;所述智能控制器,置于所述控制器支撑架上,电连接至所述检测传感器及智能灸臂;
36.所述智能控制器,包括:灸疗穴位路径设置器、检测数据收集器、灸疗数据分析处理器、灸疗路径规划处理器及灸疗控制处理器;
37.所述灸疗穴位路径设置器,为预设人体穴位识别定位数据与灸疗需求数据的需求灸疗路径数据对照表的处理器;
38.所述检测数据收集器,与所述检测传感器及灸疗数据分析处理器相连接,为接收所述检测传感器的所述检测数据,并传输至所述灸疗数据分析处理器的存储处理器;
39.所述灸疗数据分析处理器,与所述灸疗路径规划处理器相连接,为根据所述检测数据,基于预设的穴位识别定位策略得到实时人体穴位识别定位数据的分析处理器;
40.所述灸疗路径规划处理器,与所述灸疗穴位路径设置器相连接,为根据所述实时人体穴位识别定位数据、灸疗需求数据及需求灸疗路径数据对照表得到实时需求灸疗路径数据的规划处理器;
41.所述灸疗控制处理器,与所述灸疗路径规划处理器及智能灸臂相连接,为根据所述实时需求灸疗路径数据,控制所述智能灸臂对准相应穴位施灸的控制处理器;
42.该智能灸疗机器人的实施方法包括:
43.基于预设的人体灸疗躺置区域与所述智能灸臂原点的对应关系,预设结合视觉传
感器通过识别特定点位绘制总体穴位路径的穴位识别定位策略;预设人体穴位识别定位数据与灸疗需求数据的需求灸疗路径数据对照表;
44.在所述灸材放置筒内放置灸材,从所述灸疗辐射孔点燃所述灸材,接收实时需求灸疗路径数据,通过所述视觉传感器识别的实时特定点位及所述穴位识别定位策略得到实时人体穴位识别定位数据;
45.根据所述实时人体穴位识别定位数据、实时灸疗需求数据及需求灸疗路径数据对照表规划出实时需求灸疗路径数据;
46.通过所述检测传感器的检测数据控,调控所述灸疗辐射孔与实时穴位之间的实时灸疗距离及实时穴位处的实时灸疗温度得到实时调控策略,控制所述智能灸臂将所述探测型灸头机组移动至所述灸疗躺置区域按照所述实时需求灸疗路径数据及所述实时调控策略对准相应穴位施灸。
47.可选地,其中,该智能灸疗机器人的实施方法,还包括:
48.预设特异性的荧光圈直径/荧光信号与各个穴位之间的标记对照表;
49.在人体不同穴位处通过特异性标记的荧光打点器,按照所述标记对照表给不同穴位打上特异性标记;
50.通过所述视觉传感器识别所述特异性标记得到的实时特定点位,结合所述穴位识别定位策略得到实时人体穴位识别定位数据。
51.可选地,其中,该智能灸疗机器人的实施方法,还包括:
52.预设人体特定部位定点与全身轮廓图像绘制的轮廓绘制策略;
53.通过全身图像摄像机拍摄人体全身图像,基于特定部位对比识别器识别所述人体全身图像中的实时人体特定部位定点;
54.通过所述实时人体特定部位定点及轮廓绘制策略搭建人体总轮廓;
55.通过预设部位校准器单独识别并绘制预设部位的校准图像;将所述校准图像与所述人体总轮廓中的该预设部位图像对比,在两者差异性处于预设差异范围内时,确准所述人体总轮廓;
56.基于确准的所述人体总轮廓,及其与穴位定位的对应关系绘制实时人体穴位定位图像;
57.根据所述实时人体穴位定位图像得到实时人体穴位识别定位数据。
58.可选地,其中,该智能灸疗机器人的实施方法,还包括:
59.控制所述智能灸臂将所述探测型灸头机组移动至挡灰网放置台,断开所述灸疗辐射孔周边设置的磁铁为吸网电控磁铁,将所述探测型灸头机组的磁吸式挡灰网放置在所述挡灰网放置台上;
60.移动不带所述磁吸式挡灰网的探测型灸头机组至自动点火槽,所述自动点火槽,为中间设置点火凸台,外围设置配合所述探测型灸头机组的放置定位槽,使得所述灸材放置筒内灸材底部贴合所述点火凸台;开启所述点火凸台为所述探测型灸头机组内的灸材点火达到预设点火时间阈值后关闭;
61.移动所述探测型灸头机组至所述挡灰网放置台,开启所述灸疗辐射孔周边设置的磁铁为吸网电控磁铁,吸起所述磁吸式挡灰网;将所述探测型灸头机组移动对准相应穴位施灸;
62.移动不带所述磁吸式挡灰网的探测型灸头机组至自动刮灰槽,所述自动刮灰槽,为中间设置刮灰凸台,外围设置配合所述探测型灸头机组的放置定位槽,使得所述灸材放置筒内灸材底部贴合所述刮灰凸台,所述刮灰凸台为顶部呈喇叭口的刮灰片组成,所述刮灰片之间中空腔直径在所述灸材刮灰范围内;控制所述刮灰片触碰所述灸材火头前的灸灰,使其掉落;
63.移动所述探测型灸头机组至所述挡灰网放置台,开启所述灸疗辐射孔周边设置的磁铁为吸网电控磁铁,吸起所述磁吸式挡灰网;将所述探测型灸头机组移动对准相应穴位施灸。
64.(3)有益效果:
65.本发明中智能灸疗机器人及其实施方法,通过灸头机组收纳灸材实现灸材悬挂、自动推进及隔热和防烫等功能,燃烧灸材产生的灸疗烟气,通过智能控制器控制智能灸臂带动灸头机组实现各个角度、各个位置及各个距离的准确施灸。同时通过灸头机组上设置的检测传感器检测施灸位置的温度、距离,保证在施灸过程中达到灸疗的最佳效果,同时防止烫伤等安全问题的发生,实现了简易、高效、快捷、精准的灸烟净化处理式智能净烟灸疗一体机。
66.本发明中智能灸疗机器人及其实施方法,通过灸材推进器推进燃烧的灸材,使得点燃的灸材能够自动推进,实现灸材对穴位处的温度相对稳定在预设范围内,通过视觉识别器识别人体穴位并绘制灸疗路径,通过智能灸臂带动灸头机组沿着灸疗路径对人体穴位施灸,解放了人工施灸的问题。
67.本发明中智能灸疗机器人及其实施方法,设置电磁吸控制的放置挡灰网、吸起挡灰网,以及控制灸头机组自动移动至自动点火槽实现了灸材的自动点火过程,控制灸头机组自动移动至自动刮灰槽实现了灸材的自动刮灰过程,进一步地实现了灸疗过程的自动化、智能化及可追溯化,极大地推动了灸疗设备智能化进程。
附图说明
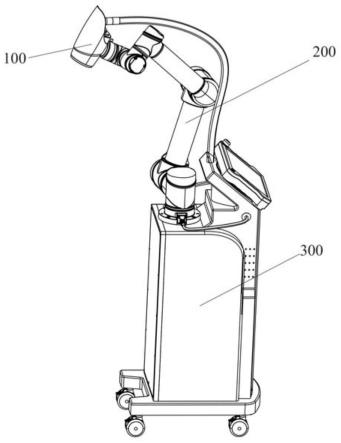
68.图1为本发明中一种智能灸疗机器人的结构示意图;
69.图2为本发明中一种智能灸疗机器人侧面的结构示意图;
70.图3为本发明中一种智能灸疗机器人中探测型灸头机组的结构示意图;
71.图4为本发明中一种智能灸疗机器人中测型灸头机组的辐射孔处的结构示意图;
72.图5为本发明中一种智能灸疗机器人中测型灸头机组内部的结构示意图;
73.图6为本发明中一种智能灸疗机器人中测型灸头机组顶部的结构示意图;
74.图7为本发明中一种智能灸疗机器人中测型灸头机组中推进器的结构示意图;
75.图8为本发明中一种智能灸疗机器人中测型灸头机组中顶盖的结构示意图;
76.图9为本发明中一种智能灸疗机器人中测型灸头机组中磁吸式挡灰网的结构示意图;
77.图10为本发明中一种智能灸疗机器人中测型灸头机组中挡灰网放置台的结构示意图;
78.图11为本发明中一种智能灸疗机器人中测型灸头机组中挡灰网放置台的内部结构示意图;
79.图12为本发明中一种智能灸疗机器人中测型灸头机组中智能净烟机组的结构示意图;
80.图13为本发明中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应器部分结构示意图;
81.图14为本发明中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应器底部结构示意图;
82.图15为本发明中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应器主体的结构示意图;
83.图16为本发明中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应器主体的内部结构示意图;
84.图17为本发明中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应筒的内部结构示意图;
85.图18为本发明中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应筒的内部细节示意图;
86.图19为本发明中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应筒中温控器的示意图;
87.图20为本发明中一种智能灸疗机器人中测型灸头机组中智能净烟机组的独立烟气反应筒的示意图;
88.图21为本发明中一种智能灸疗机器人的实施方法的流程示意图;
89.图22为本发明中第二种智能灸疗机器人的实施方法的流程示意图;
90.图23为本发明中第三种智能灸疗机器人的实施方法的流程示意图;
91.图24为本发明中第四种智能灸疗机器人的实施方法的流程示意图。
具体实施方式
92.下面结合附图1-24和实施例对本发明进一步说明:
93.灸疗的主要组成是艾灸,艾灸是燃烧艾叶、艾绒或艾柱等艾草制品来进行灸疗的,目前市面没有一种简易、高效、快捷、精准、安全的智能灸疗机器人,为此,本实施例中的智能净烟灸疗一体机提出高效、精准且智能化的智能智能灸疗及实现反应灸烟分解消除的系统及方法。
94.具体的,如图1-24所示,图1为本实施例中一种智能灸疗机器人的结构示意图;图2为本发明中一种智能灸疗机器人侧面的结构示意图;图3为本实施例中一种智能灸疗机器人中探测型灸头机组的结构示意图;图4为本实施例中一种智能灸疗机器人中测型灸头机组的辐射孔处的结构示意图;图5为本实施例中一种智能灸疗机器人中测型灸头机组内部的结构示意图;图6为本实施例中一种智能灸疗机器人中测型灸头机组顶部的结构示意图;图7为本实施例中一种智能灸疗机器人中测型灸头机组中推进器的结构示意图;图8为本实施例中一种智能灸疗机器人中测型灸头机组中顶盖的结构示意图;
95.图9为本实施例中一种智能灸疗机器人中测型灸头机组中磁吸式挡灰网的结构示意图;
96.图10为本实施例中一种智能灸疗机器人中测型灸头机组中挡灰网放置台的结构
示意图;图11为本实施例中一种智能灸疗机器人中测型灸头机组中挡灰网放置台的内部结构示意图;图12为本实施例中一种智能灸疗机器人中测型灸头机组中智能净烟机组的结构示意图;图13为本实施例中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应器部分结构示意图;图14为本实施例中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应器底部结构示意图;图15为本实施例中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应器主体的结构示意图;图16为本实施例中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应器主体的内部结构示意图;图17为本实施例中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应筒的内部结构示意图;图18为本实施例中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应筒的内部细节示意图;图19为本实施例中一种智能灸疗机器人中测型灸头机组中智能净烟机组的反应筒中温控器的示意图;图20为本实施例中一种智能灸疗机器人中测型灸头机组中智能净烟机组的独立烟气反应筒的示意图;图21为本实施例中一种智能灸疗机器人的实施方法的流程示意图;图22为本实施例中第二种智能灸疗机器人的实施方法的流程示意图;图23为本实施例中第三种智能灸疗机器人的实施方法的流程示意图;图24为本实施例中第四种智能灸疗机器人的实施方法的流程示意图。
97.具体地,本实施例中提供一种智能灸疗机器人,包括:探测型灸头机组100、智能灸臂200及机身机组300。
98.其中,探测型灸头机组100,包括:灸头外壳101、灸材放置推进筒102及检测传感器103;灸头外壳101,为中空腔体的包裹型壳体,底部开设灸疗辐射孔111,底部在灸疗辐射孔周边壳壁上设置传感器探测孔112;顶部开设灸材放置孔,外壁设置智能灸臂装配凸台113。
99.灸材放置推进筒102,由外层到内层依次设置装配固定筒121、隔热筒122及限燃控制筒123,底部均朝向灸疗辐射孔方向延伸;装配固定筒的翻边固定至灸头外壳;隔热筒通过悬空支架连接件的内翻脚连接至限燃控制筒的外壁;限燃控制筒,通过悬空支架连接件的外翻脚置于装配固定筒的翻边上,底部设置有灸材的限位卡爪125,限位卡爪朝向限燃控制筒内腔方向延伸。
100.导烟顶盖104,扣合在灸头外壳顶部,其外壁设置贯通的导烟管接头141;灸材推进器,位于导烟顶盖下侧,导烟顶盖扣合在灸头外壳顶部时,灸材推进器推进灸材朝灸疗辐射孔方向移动。
101.灸材推进器106,包括:灸材固定座161、升降齿带162、齿带转轮163及电动齿轮(图中未示出);灸材固定座从升降齿带朝向限燃控制筒内腔延伸,使得灸材固定座上的灸材悬挂件置于限燃控制筒内腔中心;齿带转轮与升降齿带内侧两端相切合,在升降齿带转动时带动灸材固定座升降;电动齿轮与升降齿带的齿条相配合,带动升降齿带转动。
102.可选地,灸材推进器,为固定在灸头外壳底面的推进弹簧,在推进弹簧的顶部通过卡合平垫卡夹紧固在灸头外壳底面,在推进弹簧的底部为灸材平推面,且在灸材平推面上延伸出灸材固定针。
103.检测传感器103,置于传感器探测孔112内,朝向灸疗辐射孔的辐射方向。检测传感器为红外测温传感器,和/或距离传感器,安置于灸头机组的底板,探头贯穿底板的探测孔朝向底板中心延长线位置,电连接至智能控制器。
104.在此还可以设置温度追踪模式,在智能控制器内预先设置在人体穴位处的灸疗温
度阈值范围,在检测传感器检测到超过所述灸疗温度阈值范围时,控制所述探测型灸头机组按照预先设定的步径模式远离穴位处,使得人体穴位处的灸疗温度达到灸疗温度阈值范围内。在检测传感器检测到低于所述灸疗温度阈值范围时,控制所述探测型灸头机组按照预先设定的步径模式靠近穴位处,使得人体穴位处的灸疗温度达到灸疗温度阈值范围内。同时还设置有与人体穴位的安全距离,控制探测型灸头机组与人体穴位的距离不少于该安全距离。
105.智能灸臂200,一端固定连接在灸臂装配凸台113,另一端的基座固定装配在机身机组原点上支撑灸头机组。
106.机身机组300,包括:机身外壳301及智能控制器302;机身外壳,为中空腔体外壳,内部容纳智能控制器及智能灸臂的驱动控制组件,外部设置智能控制器的控制器支撑架;智能控制器,置于控制器支撑架上,电连接至检测传感器及智能灸臂。
107.智能控制器,包括:灸疗穴位路径设置器、检测数据收集器、灸疗数据分析处理器、灸疗路径规划处理器及灸疗控制处理器。
108.灸疗穴位路径设置器,为预设人体穴位识别定位数据与灸疗需求数据的需求灸疗路径数据对照表的处理器。
109.检测数据收集器,与检测传感器及灸疗数据分析处理器相连接,为接收检测传感器的检测数据,并传输至灸疗数据分析处理器的存储处理器。
110.灸疗数据分析处理器,与灸疗路径规划处理器相连接,为根据检测数据,基于预设的穴位识别定位策略得到实时人体穴位识别定位数据的分析处理器。
111.灸疗路径规划处理器,与灸疗穴位路径设置器相连接,为根据实时人体穴位识别定位数据、灸疗需求数据及需求灸疗路径数据对照表得到实时需求灸疗路径数据的规划处理器。
112.灸疗控制处理器,与灸疗路径规划处理器及智能灸臂相连接,为根据实时需求灸疗路径数据,控制智能灸臂对准相应穴位施灸的控制处理器。
113.机身机组内部容纳智能净烟机组,外部设置智能控制器的控制器支撑架及导烟管的贯穿孔;导烟管,一段连接至导烟管接头,另一端穿过贯穿孔接入智能净烟机组。
114.智能净烟机组,包括:进烟口接头801、温控筒802、烟气反应筒803、反应状态检测器804及排气风机805;进烟口接头,为中空导烟腔体,一端连接至导烟管,另一端连接至温控筒的烟气导入口;温控筒,腔体内嵌有从烟气导入口至分解气体导出口方向的温控器821,温控器电连接至智能控制器;烟气反应筒,一端连接至温控筒,另一端连接至排气风机,在烟气反应筒的内腔中嵌有灸疗烟气反应器,灸疗烟气反应器为带有蜂窝通气孔且嵌涂有化学反应材料的反应翅片;反应状态检测器,安装紧固在烟气反应筒的壳体上,使得其检测探头置于灸疗烟气反应器端头且悬空,反应状态检测器电连接至智能控制器。
115.可选地,烟气反应筒803,包括:独立烟气反应筒831、反应缓冲腔筒832;其中,独立烟气反应筒,位于反应缓冲腔筒的内腔中,一端连接至温控筒,另一端开散播口将反应后气体散播再反应缓冲腔筒的内腔中;在独立烟气反应筒的内腔中嵌有灸疗烟气反应器833,灸疗烟气反应器为带有蜂窝通气孔且嵌涂有化学反应材料的反应翅片834;反应状态检测器,安装紧固在烟气反应筒的壳体上,使得其检测探头置于灸疗烟气反应器端头且悬空,反应状态检测器电连接至智能控制器。
116.反应缓冲腔筒远离开散播口的一端设置通向外侧的出气导管,出气导管连接至排气风机。
117.在一些可选的实施例中,该智能灸疗机器人,还包括:人体穴位定位器,与智能控制器相连接,为特异性标记的荧光打点器,通过特异性的荧光圈直径/荧光信号给不同穴位进行特异性识别设置的定位器。
118.在一些可选的实施例中,该智能灸疗机器人,还包括:人体穴位定位器,与智能控制器相连接,为视觉识别定位器,包括:全身图像摄像机、特定部位对比识别器、全身轮廓图像绘制处理器及预设部位校准器;为基于特定部位点搭建人体总轮廓绘制穴位定位图像的视觉识别定位穴位的处理器。
119.在一些可选的实施例中,该智能灸疗机器人,还包括:磁吸式挡灰网400,在灸头外壳的灸疗辐射孔周边设置磁铁401,磁吸式挡灰网边框对应位置内置磁铁,通过磁铁相吸将磁吸式挡灰网贴合至灸头外壳底部。
120.在一些可选的实施例中,该智能灸疗机器人,还包括:挡灰网放置台500及自动点火槽600;灸疗辐射孔周边设置的磁铁为吸网电控磁铁,电连接至智能控制器;挡灰网放置台,为底下设置搁网电控磁铁的挡灰网搁置台501,电连接至智能控制器。
121.自动点火槽600,为中间设置点火凸台601,外围设置配合探测型灸头机组的放置定位槽602,使得灸材放置筒内灸材底部贴合点火凸台,点火凸台的开关电连接至智能控制器。自动点火槽600的安装台面可以与该智能灸疗机器人结合成整体,也可以单独作为一个支持板块,预先设置好与该智能灸疗机器人的相对距离范围即可,通讯可以通过无线连接至智能控制器。
122.在一些可选的实施例中,该智能灸疗机器人,还包括:挡灰网放置台500及自动刮灰槽700;灸疗辐射孔周边设置的磁铁为吸网电控磁铁,电连接至智能控制器;挡灰网放置台,为底下设置搁网电控磁铁的挡灰网搁置台,电连接至智能控制器。自动刮灰槽700的安装台面可以与该智能灸疗机器人结合成整体,也可以单独作为一个支持板块,预先设置好与该智能灸疗机器人的相对距离范围即可,通讯可以通过无线连接至智能控制器。
123.自动刮灰槽700,为中间设置刮灰凸台701,外围设置配合探测型灸头机组的放置定位槽702,使得灸材放置筒内灸材底部贴合刮灰凸台,刮灰凸台为顶部呈喇叭口的刮灰片组成,刮灰片之间中空腔直径在灸材刮灰范围内。
124.在一些可选的实施例中,提供智能灸疗机器人的实施方法,应用于上述的智能灸疗机器人,该智能灸疗机器人的实施方法包括:
125.步骤2101、基于预设的人体灸疗躺置区域与智能灸臂原点的对应关系,预设结合视觉传感器通过识别特定点位绘制总体穴位路径的穴位识别定位策略;预设人体穴位识别定位数据与灸疗需求数据的需求灸疗路径数据对照表。
126.步骤2102、在灸材放置筒内放置灸材,从灸疗辐射孔点燃灸材,接收实时需求灸疗路径数据,通过视觉传感器识别的实时特定点位及穴位识别定位策略得到实时人体穴位识别定位数据。
127.步骤2103、根据实时人体穴位识别定位数据、实时灸疗需求数据及需求灸疗路径数据对照表规划出实时需求灸疗路径数据。
128.步骤2104、通过检测传感器的检测数据控,调控灸疗辐射孔与实时穴位之间的实
时灸疗距离及实时穴位处的实时灸疗温度得到实时调控策略,控制智能灸臂将探测型灸头机组移动至灸疗躺置区域按照实时需求灸疗路径数据及实时调控策略对准相应穴位施灸。
129.在一些可选的实施例中,该智能灸疗机器人的实施方法,还包括:
130.步骤2201、预设特异性的荧光圈直径/荧光信号与各个穴位之间的标记对照表。
131.步骤2202、在人体不同穴位处通过特异性标记的荧光打点器,按照标记对照表给不同穴位打上特异性标记。
132.荧光打点器可以通过医师人工定位给待施灸穴位打点,通过不同的荧光标记图形、直径大小、荧光强度的特异性标记给不同的穴位打上不同的标记点,如此,在智能灸疗设备识别时,通过预设的对照关系表格就能定位到各个具体的穴位,这样也就保证了穴位定点的准确性。
133.另一种方式,还可以通过图像识别绘制好人体穴位的定位图,再通过荧光打点器根据绘制的定位图给穴位打点好,再由医师人工确认判断穴位定点的准确性,从而进行校准后确定精准的穴位定点。
134.通过视觉传感器识别特异性标记得到的实时特定点位,结合穴位识别定位策略得到实时人体穴位识别定位数据。
135.在一些可选的实施例中,该智能灸疗机器人的实施方法,还包括:
136.步骤2301、预设人体特定部位定点与全身轮廓图像绘制的轮廓绘制策略。
137.步骤2302、通过全身图像摄像机拍摄人体全身图像,基于特定部位对比识别器识别人体全身图像中的实时人体特定部位定点。
138.步骤2303、通过实时人体特定部位定点及轮廓绘制策略搭建人体总轮廓。
139.步骤2304、通过预设部位校准器单独识别并绘制预设部位的校准图像;将校准图像与人体总轮廓中的该预设部位图像对比,在两者差异性处于预设差异范围内时,确准人体总轮廓。
140.可选地,校准图像可以是人体面部的面部识别图像、眼睛瞳孔的识别图像、嘴型、鼻型的识别图像、手部的识别图像、腹部的识别图像、脚部的识别图像等。因为灸疗也是在一定的圆形辐射范围内,可以允许对穴位有一个准确范围,这样在准确范围内的施灸效果都是等同的,所以通过校准图像与绘制出图像的校准效果,结合预设的校准偏差调整策略调整穴位定位点,可以实现人体灸疗穴位的准确定位,达到需求的人体穴位定位图像。
141.步骤2305、基于确准的人体总轮廓,及其与穴位定位的对应关系绘制实时人体穴位定位图像。
142.步骤2306、根据实时人体穴位定位图像得到实时人体穴位识别定位数据。
143.在一些可选的实施例中,该智能灸疗机器人的实施方法,还包括:
144.步骤2401、控制智能灸臂将探测型灸头机组移动至挡灰网放置台,断开灸疗辐射孔周边设置的磁铁为吸网电控磁铁,将探测型灸头机组的磁吸式挡灰网放置在挡灰网放置台上。
145.步骤2402、移动不带磁吸式挡灰网的探测型灸头机组至自动点火槽,自动点火槽,为中间设置点火凸台,外围设置配合探测型灸头机组的放置定位槽,使得灸材放置筒内灸材底部贴合点火凸台;开启点火凸台为探测型灸头机组内的灸材点火达到预设点火时间阈值后关闭。
146.步骤2403、移动探测型灸头机组至挡灰网放置台,开启灸疗辐射孔周边设置的磁铁为吸网电控磁铁,吸起磁吸式挡灰网;将探测型灸头机组移动对准相应穴位施灸。
147.步骤2404、移动不带磁吸式挡灰网的探测型灸头机组至自动刮灰槽,自动刮灰槽,为中间设置刮灰凸台,外围设置配合探测型灸头机组的放置定位槽,使得灸材放置筒内灸材底部贴合刮灰凸台,刮灰凸台为顶部呈喇叭口的刮灰片组成,刮灰片之间中空腔直径在灸材刮灰范围内;控制刮灰片触碰灸材火头前的灸灰,使其掉落。
148.步骤2405、移动探测型灸头机组至挡灰网放置台,开启灸疗辐射孔周边设置的磁铁为吸网电控磁铁,吸起磁吸式挡灰网;将探测型灸头机组移动对准相应穴位施灸。
149.在一些可选的实施例中,该智能灸疗机器人的实施方法,还包括:
150.在智能控制器上预设灸疗烟气反应器的正常反应温度阈值及正常反应阶段温控器的调节策略。
151.智能控制器,接收灸疗烟气反应器的实时反应状态数据信息,与正常反应温度阈值比较,在小于预热温度阈值时,按照正常反应阶段温控器的调节策略控制温控器以对应的升温功率升温;在大于正常反应温度阈值时,按照正常反应阶段温控器的调节策略控制温控器以对应的降温功率降温;在达到正常反应阶段温控器的调节策略时,生成正常工作提示消息并展示。
152.灸材装入限燃控制筒,在导烟顶盖扣合在灸头外壳顶部时,由灸材推进器贴合并以预设的推进速率推进灸材。
153.穿过灸疗辐射孔从底端点燃灸材,使得灸疗烟气顺着导烟管接头导入智能净烟机组,流经正常工作状态下的灸疗烟气反应器;反应后的气体经过排气风机排出。
154.通过移动灸臂的形态,将灸头机组对准相应穴位位置,灸材燃烧产生的能量穿过灸疗辐射孔辐射至穴位位置。
155.可选地,还包括:
156.在智能控制器上预设灸疗烟气反应器的预热反应温度阈值及预热反应阶段温控器的调节策略。
157.接收各个灸疗烟气反应器的实时预热反应状态数据信息,与预热温度阈值比较,在小于预热温度阈值时,按照预热阶段温控器的调节策略控制温控器以对应的升温功率升温。
158.在大于预热温度阈值时,按照预热阶段温控器的调节策略控制温控器以对应的降温功率降温。
159.在达到预热温度阈值范围时,生成正常工作提示消息并展示。
160.可选地,还包括:
161.预设灸材品质、灸材直径与推进步径、推进持续时间及燃烧时间之间的相互对应的推进关系对照表。
162.在点燃灸材后,根据灸材的品质、直径与推进关系对照表得到实时的推进步径、推进持续时间及燃烧时间的实时推进数据。
163.控制电动齿轮转动,按照实时推进数据带动升降齿带转动,进而控制灸材火头与穴位位置之间的灸疗距离。
164.可选地,该实施方法,还包括:
165.预设在穴位位置处的灸疗温度及灸疗距离与推进步径、推进持续时间之间的感测推进关系对照表。
166.通过感测传感器实时检测在穴位位置处的灸疗温度及灸疗距离;与感测推进关系对照表对照得到实时的的推进步径及推进持续时间的实时感测推进数据。
167.控制电动齿轮转动,按照实时感测推进数据带动升降齿带转动,进而控制灸材火头与穴位位置之间的灸疗距离。
168.本实施例的有益效果:
169.本实施例的智能灸疗机器人及其实施方法,通过智能机械臂配合灸疗机组,实现自动化的灸疗路径、灸材自动点火、灸材自动刮灰,灸疗温度自动追踪、灸疗安全性自动保证,减少了灸疗过程中的人工,还保证了灸疗过程的标准统一化,还可以实时记录灸疗数据,为后续的大数据分析做基础数据。另外,还通过智能控制器可配合多段式反应器加热环境对烟气进行净化,各段独立反应器分别针对灸烟焦油、tvoc、氮氧化合物、甲醛、co等设置有效针对性的反应物涂层,逐级针对性分解烟气中有害物质,通过中心加热棒进行各段独立反应器的温度控制。
170.可提高对灸疗烟气的净化效果,并且可根据内部实时温度的反馈,并通过与预设净化温度阈值范围的比对策略,针对内温控器的通断及功率大小,从而保证消烟反应器内温度处于一定恒温范围内,构成消烟净化器正常工作的循环,该种温度调控方式更为智能,能更为精准的根据实际需求对灸疗烟气进行净化处理。
171.本发明的实施例公布的是较佳的实施例,但并不局限于此,本领域的普通技术人员,极易根据上述实施例,领会本发明的精神,并做出不同的引申和变化,但只要不脱离本发明的精神,都在本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1