一种基于脑电信号及中枢模式发生器的外骨骼控制系统及方法
本发明涉及机器人控制,具体是涉及一种基于脑电信号及中枢模式发生器的外骨骼控制系统及方法。
背景技术:
1、随着老龄化的不断加深,随之而来的问题也逐渐增多。据近期的人口普查结果显示,中国有超过8500万的人患有身体残疾,而在这上亿残疾人中,占最大一部分比例的属于肢体残疾,约有2500万人,占总残疾人口的30%,这类人生活十分不便。老年人和残疾人数量的增加给社会服务和发展带来了巨大的挑战。迄今为止,关于老年人和残疾人康复的研究已经成为了一个新的研究热点。康复外骨骼机器人是一种特殊的可穿戴机器人,对于下肢受损者,机器人会推动人的大腿和小腿,帮助人进行移动,坐立等。
2、脑机接口是一种通过采集人体大脑皮层电信号,实现大脑与外部设备直接交互的新型方式,其中,基于运动想象的脑机接口通过被试者自发性地想象肢体运动来控制外接设备的运动,是一种被广泛用于人体交互与康复医疗的脑机接口方式。通过脑电信号控制行走速度相较于手动调节具有速度快,便捷等优势。目前已有通过脑肌电融合信号识别穿戴者运动意图从而控制外骨骼机器人的专利,如专利公开号为cn 110815181 a的中国专利,但由于运动想象电信号的二分类特性,该种控制方法往往都需要通过肌电信号控制外骨骼行走的速度。而脑肌电融合控制不仅方案复杂、信号之间易出现互相干扰从而影响控制效率,且穿戴在人体上的肌电信号采集器易与外骨骼之间发生摩擦从而脱落,导致信号不稳定。
3、中枢模式发生器(central pattern generator,简称cpg)是动物节律运动的由神经细胞及特定的连接所组成的控制系统,hopf振荡器是对该控制系统的一种简单模拟,具体而言,在不知道中枢模式发生器的构造的前提下,通过分析其输出信号,人为的构造一种控制系统,使其与中枢模式发生器有相似的输出,就认为是对其的模拟。目前,现有技术中存在将cpg应用于康复外骨骼当中,如专利公开号为cn 106112985 a以及cn 106110587 a的中国专利。但目前此类方法均是在外骨骼开始工作前通过调整cpg的参数设置好行走的速度以及步长,在外骨骼开始行走后只能根据受试者的运动意图,以设定好的运动参数调整外骨骼的运动。即无法在运动过程中根据使用者的意愿自由的切换速度。
技术实现思路
1、发明目的:针对以上缺点,本发明提供一种根据受试者意图进行实时速度调节的基于脑电信号及中枢模式发生器的外骨骼控制系统及方法。
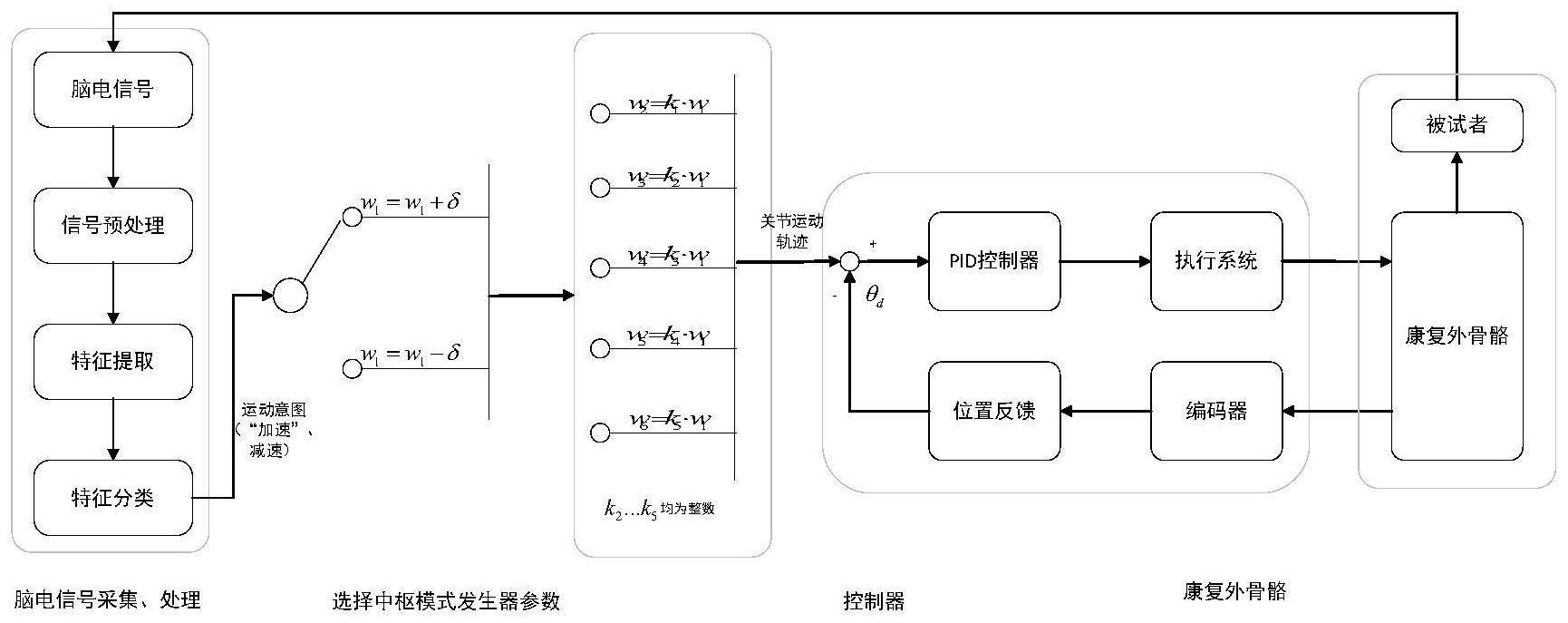
2、技术方案:为解决上述问题,本发明采用一种基于脑电信号及中枢模式发生器的外骨骼控制系统,包括脑电信号采集并分析处理模块、中枢模式发生器模块、外骨骼控制模块;所述脑电信号采集并分析处理模块用于采集脑电信号,并对采集的脑电信号进行分析处理,得到运动趋势信号;所述中枢模式发生器模块包括若干中枢模式发生器,所述中枢模式发生器用于产生自振荡的信号模拟不同行走速度下的骨骼变化情况;所述外骨骼控制模块用于根据得到的运动趋势信号,通过中枢模式发生器,得到外骨骼运动轨迹,并根据得到的外骨骼运动轨迹控制外骨骼运动。
3、进一步的,所述中枢模式发生器包括若干振荡器,所有振荡器的信号叠加得到外骨骼各关节的角度变化情况,若干振荡器中的一个为基振荡器,根据运动趋势信号改变基振荡器的振荡频率,其他振荡器的振荡频率同步变化为基振荡器振荡频率的整数倍。
4、本发明还采用一种基于脑电信号及中枢模式发生器的外骨骼控制方法,包括以下步骤:
5、(1)采集脑电信号,并对采集的脑电信号进行分析处理,得到运动趋势信号;
6、(2)建立中枢模式发生器模块,中枢模式发生器模块包括若干中枢模式发生器,所述中枢模式发生器产生自振荡的信号模拟不同行走速度下的骨骼变化情况;
7、(3)根据得到的运动趋势信号,通过中枢模式发生器,得到外骨骼运动轨迹;
8、(4)根据得到的外骨骼运动轨迹控制外骨骼运动。
9、进一步的,所述步骤(1)中对采集的脑电信号进行分析处理具体包括以下步骤:
10、(1.1)进行滤波预处理:采用公共平均参考空间滤波得到处理后的数据,并利用巴特沃斯带通滤波从处理后的数据中去除不需要的频率段信号,得到预处理信号;
11、(1.2)采用噪声辅助的多变量经验模式将预处理信号分解成多个本征模函数imf分量;
12、(1.3)通过互信息算法计算不同阶次imf分量的敏感因子;
13、(1.4)根据敏感因子选择合适的imf分量进行信号重构;
14、(1.5)通过共空间模式算法提取重构信号的特征向量;
15、(1.6)通过支持向量机对得到的特征值进行特征分类,得到加速趋势信号或减速趋势信号。
16、进一步的,所述步骤(1.2)中具体包括以下步骤:
17、(1.21)所述预处理信号为x(t)={x1(t),x2(t),...,xv(t)},v为变量个数,信号长度为l;
18、(1.22)随机生成s个通道互相独立的高斯白噪声信号n(t)={n1(t),n2(t),...,ns(t)},生成的高斯白噪声信号的信号长度也为l;
19、(1.23)在预处理信号x(t)新增s个通道,新增信号为上一步骤生成的高斯白噪声信号n(t),得到一个q=s+v通道的合成信号z(t)={z1(t),z2(t),...,zq(t)};
20、(1.24)生成一个q维空间的方向向量通过在一个球面空间选择q-1个采样点集得到;
21、(1.25)计算步骤(1.22)中合成信号z(t)沿着方向的投影,得到
22、(1.26)计算中的最大值和最小值对应的时间点,将极值点的位置记为j,j∈[1,...l],则时间点记为
23、(1.27)设k为方向向量的个数,使用样条插值算法计算的多变量包络曲线
24、(1.28)计算上述k个方向向量的均值包络曲线为
25、(1.29)计算第i阶imf分量ci(t)=z(t)-m(t),残差ri(t)=z(t)-ci(t),对ri(t)重复(1.25)-(1.29)步骤e次直到ri(t)变成单调函数,最终得到第i阶imf分量。
26、进一步的,所述步骤(1.3)中具体包括以下步骤:
27、(1.31)基于互信息计算方法计算出预处理信号x(t)={x1(t),x2(t),...,xv(t)}与其第i阶imf分量cxi(t)={cx1i(t),cx2i(t),...,cxvi(t)}之间的互信息ai,其中i=1,2,...,m,m为最大可分解层数;
28、(1.32)基于互信息计算方法计算出添加的高斯白噪声信号n(t)={n1(t),n2(t),...,ns(t)}与其第i阶imf分量cni(t)={cn1i(t),cn2i(t),...,cnsi(t)}之间的互信息bi,其中i=1,2,...,m;
29、(1.33)计算x(t)的第i阶imf分量与n(t)的第i阶imf分量之间的互信息ei;
30、(1.34)计算第i阶imf分量的敏感因子ri:
31、
32、所述步骤(1.4)中将敏感因子高的三阶imf分量叠加,所得信号作为各通道重构信号。
33、进一步的,所述互信息计算方法具体为:
34、设任意两个长度为l的信号为x和y,它们的熵分别为h(x)和h(y),信号x和信号y的边缘概率密度分别记为px(x)和py(y),同时它们之间的联合熵设为h(x,y),将信号x和信号y的联合概率密度记为p(x,y),则h(x)、h(y)和h(x,y)计算公式如下:
35、
36、
37、
38、则,信号x和信号y的互信息可由下式计算而得:
39、i(x,y)=h(x)+h(y)-h(x,y)。
40、进一步的,所述步骤(2)中中枢模式发生器包括若干振荡器,振荡器方程组为:
41、
42、
43、其中,f(t)=p(t)-q(t),f(t)为中枢模式发生器需要学习的信号p(t)的剩余部分;q(t)为中枢模式发生器已经学习的部分,即为中枢模式发生器的输出;ai表示中枢模式发生器与振荡器i的振荡频率wi的相关程度;η是学习常数,决定各个振荡器的αi的增长快慢;γ表示振荡器受到扰动后的恢复速度;μ表示振荡器震荡的幅度;ε>0是耦合常数。
44、进一步的,所述中枢模式发生器包括基振荡器,步骤(3)中根据得到的加速趋势信号或减速趋势信号,将基振荡器的振荡频率增加或减少δ,其余振荡器的振荡频率均变化为基振荡器振荡频率的整数倍,其中δ为振荡器振荡频率变化的最小单元。
45、有益效果:本发明相对于现有技术,其显著优点是使用脑电信号调整cpg参数控制外骨骼行走,实现外骨骼控制的快速响应,实现了使用者通过脑电信号在行走过程中控制康复外骨骼连续调节行走速度,提高康复外骨骼的用户体验。
- 还没有人留言评论。精彩留言会获得点赞!