一种药品配送机器人
1.本发明涉及机器人配送技术领域,具体而言,涉及一种药品配送机器人。
背景技术:
2.在医院中,患者或者医护人员取药都需要通过人工排队的方式获取药品,存在排队人数多,排队时间长的问题,对于患者来说,增加了患者在医院的流程,对于医护人员来说,大大增加了工作量。在疫情爆发期间,患者无法亲自取药,需要医护人员配送,增加了医护人员的感染风险。
技术实现要素:
3.针对现有技术中的上述不足,本发明提供的一种药品配送机器人解决了在医院中需要通过人工排队的方式进行取药的问题。
4.为了达到上述发明目的,本发明采用的技术方案为:一种药品配送机器人,包括:头部和躯干,所述躯干的一端设置有移动单元,其另一端与头部连接;
5.所述躯干上设置有距离导航探测单元、图像导航探测单元、药箱、显示器和扫码器;所述头部设置有门牌识别单元、人脸识别单元、第一消毒喷口、第二消毒喷口和喇叭;
6.所述距离导航探测单元用于测量机器人在行走过程中距离障碍物的距离;所述图像导航探测单元用于采集并识别机器人在行走过程中的环境图像,得到第一估计位置;所述药箱用于盛装待配送药品,其上还设有消毒喷口,用于对药品或药箱的消毒;所述显示器用于显示药品信息、取药人员信息、取药人员确认信息和取药码;所述扫码器用于扫描药品单上二维码,核对药品信息,调取配送位置,以及用于扫描取药端二维码,核对取药人员信息;所述门牌识别单元用于识别行走过程中所在区域的门牌号,得到第二估计位置;所述人脸识别单元用于采集取药人脸图像,核对取药人员信息;所述第一消毒喷口和第二消毒喷口用于对机器人外部消毒;所述喇叭用于播报文字信息或者报警;所述移动单元用于根据环境图像、距离障碍物的距离、配送位置和当前所在位置,将药品配送至指定的位置。根据所述第一估计位置和第二估计位置,得到机器人当前所在位置。
7.进一步地,所述距离导航探测单元的类型包括:激光测距和超声波测距。
8.进一步地,所述图像导航探测单元包括:第一图像采集子单元、第一特征提取子单元和第一特征匹配子单元;
9.所述第一图像采集子单元用于采集机器人在行走过程中的环境图像;所述第一特征提取子单元用于提取环境图像中的标志目标特征;所述第一特征匹配子单元用于将标志目标特征与存储目标特征数据进行匹配,得到第一估计位置。
10.进一步地,所述门牌识别单元包括:第二图像采集子单元、第二特征提取子单元和第二特征匹配子单元;
11.所述第二图像采集子单元机用于采集机器人在行走过程中的环境图像;所述第二特征提取子单元用于提取环境图像中的门牌号特征;所述第二特征匹配子单元用于将门牌
号特征与存储门牌号特征数据进行匹配,得到第二估计位置。
12.进一步地,所述第一特征提取子单元或第二特征提取子单元包括:滤波模块、灰度处理模块、物体轮廓切分模块和特征提取模块;
13.所述滤波模块用于对环境图像进行滤波处理,得到滤波图像;所述灰度处理模块用于对滤波图像进行灰度处理,得到灰度图;所述物体轮廓提取模块用于提取灰度图的物体轮廓,得到轮廓图;所述体轮廓切分模块用于根据轮廓图上的各物体轮廓所在位置,将轮廓图进行划分,得到多个轮廓子图;所述特征提取模块用于从多个轮廓子图中提取门牌号特征或者标志目标特征。
14.进一步地,所述对环境图像进行滤波处理的公式为:
[0015][0016]
其中,y
l
为环境图像中第l个像素点滤波后的像素值,n为滤波块中像素点的数量,{x1,...,xi,...,xn}
l
为第l个滤波块中所有待滤波像素点的像素值组成的序列,第l个滤波块中像素点由待滤波的第l个像素点的像素值,及第l个像素点周边多个待滤波像素点的像素值构成,mid{x1,...,xi,...,xn}
l
为取序列中位数,xi为序列中第i个待滤波像素点的像素值,x1为序列中第1个待滤波像素点的像素值,xn为序列中第n个待滤波像素点的像素值,为计算滤波块中除滤波位置外的其他像素点的像素值之和,x
′i为除滤波位置外的第i个待滤波像素点的像素值,λ为滤波权重。
[0017]
上述进一步方案的有益效果为:本发明在对图像进行滤波时,以中位数作为滤波的基础,中位数能表征整体数据的情况,同时,通过其周边像素值的情况,考虑周边像素值的大小,以周边像素值的加权值对中位数的大小进行补偿,从而更好的消除噪声,并保留原始信息。
[0018]
进一步地,所述第一特征匹配子单元用于将标志目标特征与存储目标特征数据进行匹配,得到第一估计位置包括:
[0019]
在标志目标特征和存储目标特征数据同时满足以下两个条件时,标志目标特征与存储目标特征数据匹配成功,根据匹配的存储目标特征数据得到第一估计位置;
[0020]
条件一:
[0021][0022]
条件二:
[0023][0024]
其中,a为标志目标特征的像素点数,b为存储目标特征数据的像素点数,a
*
为标志目标特征的面积,b
*
为存储目标特征数据的面积,∩为交集,∪为并集,为标志目标特征上选取的第j个像素点的梯度的模,为存储目标特征数据上选取的第j个像素点的梯度的模,为标志目标特征上选取的第j个像素点的方向,
为存储目标特征数据上选取的第j个像素点的方向,t1为第一阈值,t2为第二阈值。
[0025]
上述进一步方案的有益效果为:在像素点数量以及面积初步匹配的情况下,通过条件二核对像素点的梯度和方向,标志目标特征和存储目标特征数据在像素点的梯度和方向相差较小时,标志目标特征与存储目标特征数据匹配成功。
[0026]
进一步地,所述第二特征匹配子单元用于将门牌号特征与存储门牌号特征数据进行匹配,得到第二估计位置包括:
[0027]
在门牌号特征和存储门牌号特征数据同时满足以下两个条件时,门牌号特征与存储门牌号特征数据匹配成功,根据匹配的存储门牌号特征数据得到第二估计位置;
[0028]
条件一:
[0029][0030]
条件二:
[0031][0032]
其中,c为门牌号特征的像素点数,d为存储门牌号特征数据的像素点数,c
*
为门牌号特征的面积,d
*
为存储门牌号特征数据的面积,∩为交集,∪为并集,为门牌号特征上选取的第j个像素点的梯度的模,为存储门牌号特征数据上选取的第j个像素点的梯度的模,为门牌号特征上选取的第j个像素点的方向,为存储门牌号特征数据上选取的第j个像素点的方向,t3为第三阈值,t4为第四阈值。
[0033]
上述进一步方案的有益效果为:在像素点数量以及面积初步匹配的情况下,通过条件二核对像素点的梯度和方向,门牌号特征和存储门牌号特征数据在像素点的梯度和方向相差较小时,门牌号特征与存储门牌号特征数据匹配成功。
[0034]
进一步地,所述人脸识别单元包括:人脸图像采集单元、人脸特征提取单元和人脸特征匹配单元;
[0035]
所述人脸图像采集单元用于采集取药人脸图像;所述人脸特征提取单元用于提取取药人脸图像的人脸特征;所述人脸特征匹配单元用于将提取的人脸特征与存储的人脸特征进行匹配,得到取药人员身份,核对取药人员信息。
[0036]
进一步地,所述人脸特征或存储的人脸特征包括:眼睛关键点数据集、鼻子关键点数据集和嘴巴关键点数据集;
[0037]
所述人脸特征匹配单元用于将提取的人脸特征与存储的人脸特征进行匹配包括:将采集的关键点数据集与存储的关键点数据集进行匹配,匹配度高于匹配阈值时,匹配成功,所述关键点数据集的类型包括:眼睛关键点数据集、鼻子关键点数据集和嘴巴关键点数据集;
[0038]
匹配度的计算公式为:
[0039][0040]
其中,cor为匹配度,q为采集的关键点数据集中关键点的数量,(x
o,t
,y
o,t
)为采集的关键点数据集中第t个关键点的坐标,x
o,t
为(x
o,t
,y
o,t
)的横坐标,y
o,t
为(x
o,t
,y
o,t
)的纵坐标,为在采集的关键点数据集中以关键点(x
o,t
,y
o,t
)位置为聚类中心,聚类半径为r,构成的聚类范围x中除关键点(x
o,t
,y
o,t
)外的第k个关键点的坐标,为的横坐标,为的纵坐标,k为采集的关键点数据集中除关键点(x
o,t
,y
o,t
)外的聚类范围x中的关键点数量,为在存储的关键点数据集中以关键点(x
o,t
,y
o,t
)位置为聚类中心,聚类半径为r,构成的聚类范围y中第k个关键点的坐标,为的横坐标,为的纵坐标,r为聚类范围y中除关键点(x
o,t
,y
o,t
)外的关键点数量。
[0041]
上述进一步方案的有益效果为:若关键点f和关键点g恰好处于人脸的同一位置或同一范围,通过在关键点数据集中的关键点f,去准确匹配存储的关键点数据集中与关键点f对应的关键点g,关键点f很难去准确匹配到关键点g,一个关键点的匹配错误,会影响下一个关键点的匹配,可能会导致所有关键点的错位。因此,本发明将关键点数据集进行分类,在每一类中进行匹配,每一个采集的关键点数据集中的关键点(x
o,t
,y
o,t
),均对应有聚类范围x和聚类范围y,以关键点(x
o,t
,y
o,t
)在聚类范围x中距离其他关键点的距离,减去以关键点(x
o,t
,y
o,t
)在聚类范围y中距离,衡量各个关键点的分布情况,表征各个关键点的位置分布情况是否相似,若相似,每个聚类范围计算的距离是相差不大的,在匹配度越高时,采集的关键点数据集与存储的关键点数据集匹配程度越高。
[0042]
本发明实施例的技术方案至少具有如下优点和有益效果:
[0043]
1、本发明扫码器在取药时,通过扫描药品单,从而得到配送位置,通过门牌识别单元和图像导航探测单元的协助,使得机器人能够获知自身所在位置,从而能够驱动移动单元到达配送位置。
[0044]
2、本发明还设有第一消毒喷口和第二消毒喷口,在进入不同区域时可进行消毒,保障机器人本身不会传播病毒,同时药箱上设有消毒喷口,保障人员在取药时,不会被传播病毒,本发明解决了在医院中需要通过人工排队的方式进行取药的问题,实现一种全自动取药送药机器人。
附图说明
[0045]
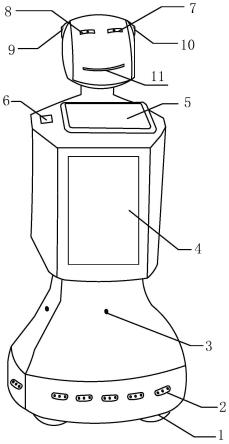
图1为一种药品配送机器人的结构示意图;
[0046]
其中,1、移动单元;2、距离导航探测单元;3、图像导航探测单元;4、药箱;5、显示
器;6、扫码器;7、门牌识别单元;8、人脸识别单元;9、第一消毒喷口;10、第二消毒喷口;11、喇叭。
具体实施方式
[0047]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。通常在此处附图中描述和示出的本发明实施例的组件可以以各种不同的配置来布置和设计。
[0048]
如图1所示,一种药品配送机器人,包括:头部和躯干,所述躯干的一端设置有移动单元1,其另一端与头部连接;
[0049]
所述躯干上设置有距离导航探测单元2、图像导航探测单元3、药箱4、显示器5和扫码器6;所述头部设置有门牌识别单元7、人脸识别单元8、第一消毒喷口9、第二消毒喷口10和喇叭11;
[0050]
所述距离导航探测单元2用于测量机器人在行走过程中距离障碍物的距离;所述图像导航探测单元3用于采集并识别机器人在行走过程中的环境图像,得到第一估计位置;所述药箱4用于盛装待配送药品,其上还设有消毒喷口,用于对药品或药箱的消毒;所述显示器5用于显示药品信息、取药人员信息、取药人员确认信息和取药码;所述扫码器6用于扫描药品单上二维码,核对药品信息,调取配送位置,以及用于扫描取药端二维码,核对取药人员信息;所述门牌识别单元7用于识别行走过程中所在区域的门牌号,得到第二估计位置;所述人脸识别单元8用于采集取药人脸图像,核对取药人员信息;所述第一消毒喷口9和第二消毒喷口10用于对机器人外部消毒;所述喇叭11用于播报文字信息或者报警;所述移动单元1用于根据环境图像、距离障碍物的距离、配送位置和当前所在位置,将药品配送至指定的位置。根据所述第一估计位置和第二估计位置,得到机器人当前所在位置。
[0051]
在本实施例中,显示器5显示的取药码用于在取药人员取药时,通过取药人员手持取药端扫码器对机器人的显示器5显示的取药码进行扫描,从而获取药品信息和取药人员信息,并在取药端扫码器上点击确认信息,从而实现对取药信息的确认,确认信息通过通信网络传输至机器人,通过这种方式尽量避免取药人员过多接触机器人。
[0052]
取药端扫码器包括二维码扫描仪和条码扫描仪,更进一步地可采用手机作为扫码器,通过手机上的小程序调取手机摄像头进行扫描。
[0053]
在本实施例中,躯干中设置有推拉结构,推拉结构与药箱4固定,在需要取药时,将药箱4推出躯干,药品放入后,将药箱4拉入躯干,并在拉入躯干后,进行消毒,防止病毒扩散。
[0054]
在本实施例中,机器人还设有通信单元,用于实现与医院系统通信连接,用于获取医护人员放在医院系统中的取药指令,机器人根据取药指令,执行取药动作。
[0055]
机器人在取药完成,并达到预定位置时,显示器5会显示药品信息、取药人员信息和取药人员确认信息,扫码器6可扫描取药端二维码核对取药人员信息或者通过采集取药人脸图像,核对取药人员信息,在人员信息核对后,再根据取药人员点击的确认信息,打开药箱4,等待取药人员取药,若身份信息不对或者取药人员未点击的确认信息,则可通过喇叭11提示或者报警,并将异常情况上报。
[0056]
所述距离导航探测单元2的类型包括:激光测距和超声波测距。
[0057]
所述图像导航探测单元3包括:第一图像采集子单元、第一特征提取子单元和第一特征匹配子单元;
[0058]
所述第一图像采集子单元用于采集机器人在行走过程中的环境图像;所述第一特征提取子单元用于提取环境图像中的标志目标特征;所述第一特征匹配子单元用于将标志目标特征与存储目标特征数据进行匹配,得到第一估计位置。
[0059]
所述门牌识别单元7包括:第二图像采集子单元、第二特征提取子单元和第二特征匹配子单元;
[0060]
所述第二图像采集子单元机用于采集机器人在行走过程中的环境图像;所述第二特征提取子单元用于提取环境图像中的门牌号特征;所述第二特征匹配子单元用于将门牌号特征与存储门牌号特征数据进行匹配,得到第二估计位置。
[0061]
所述第一特征提取子单元或第二特征提取子单元包括:滤波模块、灰度处理模块、物体轮廓切分模块和特征提取模块;
[0062]
所述滤波模块用于对环境图像进行滤波处理,得到滤波图像;所述灰度处理模块用于对滤波图像进行灰度处理,得到灰度图;所述物体轮廓提取模块用于提取灰度图的物体轮廓,得到轮廓图;所述体轮廓切分模块用于根据轮廓图上的各物体轮廓所在位置,将轮廓图进行划分,得到多个轮廓子图;所述特征提取模块用于从多个轮廓子图中提取门牌号特征或者标志目标特征。
[0063]
所述对环境图像进行滤波处理的公式为:
[0064][0065]
其中,y
l
为环境图像中第l个像素点滤波后的像素值,n为滤波块中像素点的数量,{x1,...,xi,...,xn}
l
为第l个滤波块中所有待滤波像素点的像素值组成的序列,第l个滤波块中像素点由待滤波的第l个像素点的像素值,及第l个像素点周边多个待滤波像素点的像素值构成,mid{x1,...,xi,...,xn}
l
为取序列中位数,xi为序列中第i个待滤波像素点的像素值,x1为序列中第1个待滤波像素点的像素值,xn为序列中第n个待滤波像素点的像素值,为计算滤波块中除滤波位置外的其他像素点的像素值之和,x
′i为除滤波位置外的第i个待滤波像素点的像素值,λ为滤波权重。
[0066]
本发明在对图像进行滤波时,以中位数作为滤波的基础,中位数能表征整体数据的情况,同时,通过其周边像素值的情况,考虑周边像素值的大小,以周边像素值的加权值对中位数的大小进行补偿,从而更好的消除噪声,并保留原始信息。
[0067]
所述第一特征匹配子单元用于将标志目标特征与存储目标特征数据进行匹配,得到第一估计位置包括:
[0068]
在标志目标特征和存储目标特征数据同时满足以下两个条件时,标志目标特征与存储目标特征数据匹配成功,根据匹配的存储目标特征数据得到第一估计位置,存储目标特征数据与位置信息一一对应存储在系统中;
[0069]
条件一:
[0070][0071]
条件二:
[0072][0073]
其中,a为标志目标特征的像素点数,b为存储目标特征数据的像素点数,a
*
为标志目标特征的面积,b
*
为存储目标特征数据的面积,∩为交集,∪为并集,为标志目标特征上选取的第j个像素点的梯度的模,为存储目标特征数据上选取的第j个像素点的梯度的模,为标志目标特征上选取的第j个像素点的方向,为存储目标特征数据上选取的第j个像素点的方向,t1为第一阈值,t2为第二阈值。
[0074]
在像素点数量以及面积初步匹配的情况下,通过条件二核对像素点的梯度和方向,标志目标特征和存储目标特征数据在像素点的梯度和方向相差较小时,标志目标特征与存储目标特征数据匹配成功。
[0075]
所述第二特征匹配子单元用于将门牌号特征与存储门牌号特征数据进行匹配,得到第二估计位置包括:
[0076]
在门牌号特征和存储门牌号特征数据同时满足以下两个条件时,门牌号特征与存储门牌号特征数据匹配成功,根据匹配的存储门牌号特征数据得到第二估计位置,存储门牌号特征数据与位置信息一一对应存储在系统中;
[0077]
条件一:
[0078][0079]
条件二:
[0080][0081]
其中,c为门牌号特征的像素点数,d为存储门牌号特征数据的像素点数,c
*
为门牌号特征的面积,d
*
为存储门牌号特征数据的面积,∩为交集,∪为并集,为门牌号特征上选取的第j个像素点的梯度的模,为存储门牌号特征数据上选取的第j个像素点的梯度的模,为门牌号特征上选取的第j个像素点的方向,为存储门牌号特征数据上选取的第j个像素点的方向,t3为第三阈值,t4为第四阈值。
[0082]
在像素点数量以及面积初步匹配的情况下,通过条件二核对像素点的梯度和方向,门牌号特征和存储门牌号特征数据在像素点的梯度和方向相差较小时,门牌号特征与存储门牌号特征数据匹配成功。
[0083]
所述人脸识别单元8包括:人脸图像采集单元、人脸特征提取单元和人脸特征匹配单元;
[0084]
所述人脸图像采集单元用于采集取药人脸图像;所述人脸特征提取单元用于提取取药人脸图像的人脸特征;所述人脸特征匹配单元用于将提取的人脸特征与存储的人脸特
征进行匹配,得到取药人员身份,核对取药人员信息。
[0085]
所述人脸特征或存储的人脸特征包括:眼睛关键点数据集、鼻子关键点数据集和嘴巴关键点数据集;
[0086]
所述人脸特征匹配单元用于将提取的人脸特征与存储的人脸特征进行匹配包括:将采集的关键点数据集与存储的关键点数据集进行匹配,匹配度高于匹配阈值时,匹配成功,所述关键点数据集的类型包括:眼睛关键点数据集、鼻子关键点数据集和嘴巴关键点数据集;
[0087]
匹配度的计算公式为:
[0088][0089]
其中,cor为匹配度,q为采集的关键点数据集中关键点的数量,(x
o,t
,y
o,t
)为采集的关键点数据集中第t个关键点的坐标,x
o,t
为(x
o,t
,y
o,t
)的横坐标,y
o,t
为(x
o,t
,y
o,t
)的纵坐标,为在采集的关键点数据集中以关键点(x
o,t
,y
o,t
)位置为聚类中心,聚类半径为r,r>0,构成的聚类范围x中除关键点(x
o,t
,y
o,t
)外的第k个关键点的坐标,为的横坐标,为的纵坐标,k为采集的关键点数据集中除关键点(x
o,t
,y
o,t
)外的聚类范围x中的关键点数量,为在存储的关键点数据集中以关键点(x
o,t
,y
o,t
)位置为聚类中心,聚类半径为r,构成的聚类范围y中第k个关键点的坐标,为的横坐标,为的纵坐标,r为聚类范围y中除关键点(x
o,t
,y
o,t
)外的关键点数量。
[0090]
若关键点f和关键点g恰好处于人脸的同一位置或同一范围,通过在关键点数据集中的关键点f,去准确匹配存储的关键点数据集中与关键点f对应的关键点g,关键点f很难去准确匹配到关键点g,一个关键点的匹配错误,会影响下一个关键点的匹配,可能会导致所有关键点的错位。因此,本发明将关键点数据集进行分类,在每一类中进行匹配,每一个采集的关键点数据集中的关键点(x
o,t
,y
o,t
),均对应有聚类范围x和聚类范围y,以关键点(x
o,t
,y
o,t
)在聚类范围x中距离其他关键点的距离,减去以关键点(x
o,t
,y
o,t
)在聚类范围y中距离,衡量各个关键点的分布情况,表征各个关键点的位置分布情况是否相似,若相似,每个聚类范围计算的距离是相差不大的,在匹配度越高时,采集的关键点数据集与存储的关键点数据集匹配程度越高。
[0091]
本发明实施例的技术方案至少具有如下优点和有益效果:
[0092]
1、本发明扫码器6在取药时,扫描药品单,从而得到配送位置,通过门牌识别单元7和图像导航探测单元3的协助,使得机器人能够获知自身所在位置,从而能够驱动移动单元1到达配送位置。
[0093]
2、本发明还设有第一消毒喷口9、第二消毒喷口10,在进入不同区域时可进行消毒,保障机器人本身不会传播病毒,同时药箱4上设有消毒喷口,保障人员在取药时,不会被传播病毒,本发明解决了在医院中需要通过人工排队的方式进行取药的问题,实现一种全自动取药送药机器人。
[0094]
以上仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1