一种远程诊断平台
1.本发明涉及诊断平台,更具体的说是一种远程诊断平台。
背景技术:
2.远程医疗是指通过计算机技术、遥感、遥测技术为依托,充分发挥医院或专科医疗中心的医疗技术和医疗设备优势,对医疗条件较差的地区的人群进行远距离诊断、治疗和咨询。现有的远程诊断平台仅仅存在摄像头,无法将患者的身体固定在某处,这样医生就无法仔细观察患者的身体,尤其是观察患者皮肤时,如果不将身体的某处皮肤固定,医生就不易对患者的皮肤进行观察诊断。
技术实现要素:
3.为克服现有技术的不足,本发明提供一种远程诊断平台,其有益效果为可以便于医生远程观察皮肤,便于医生远程观察手腕处的皮肤,方便医生对皮肤疾病进行诊断。
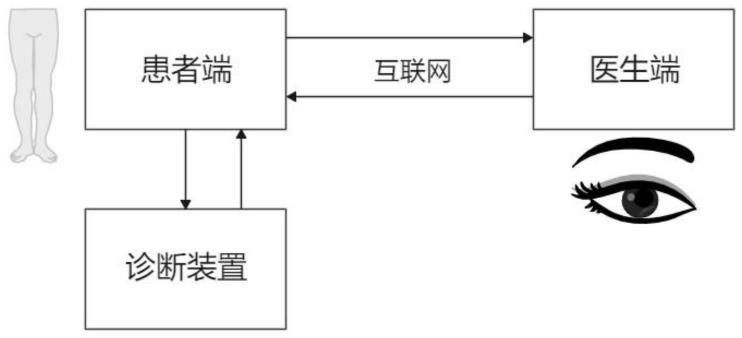
4.一种远程诊断平台,包括医生端、患者端和诊断装置,所述诊断装置通过usb连接线连接在患者端,患者端通过互联网连接在医生端;
5.所述诊断装置包括弧面板、弧棱和橡胶边,弧面板的后部粘接有橡胶边,弧面板的上侧从前至后设置有多个弧棱。
6.所述诊断装置还包括支脚,弧面板下侧的前后两端均固定连接有支脚。
7.所述诊断装置还包括握柱、挡片、橡胶绳、滑块、圆杆和门架,门架设置在弧面板的下侧,门架的两端均固定连接有圆杆,每个圆杆的上部均固定连接有挡片,多个握柱通过一个橡胶绳穿在一起,橡胶绳的两端均固定连接有滑块,两个滑块分别滑动连接在两个圆杆上,每个圆杆上均套接有压缩弹簧i,每个压缩弹簧i均位于对应的挡片和滑块之间。
8.所述门架在前后方向上滑动连接在弧面板的下侧,弧面板的下侧通过螺纹连接有紧固螺丝,紧固螺丝压在门架上将门架固定。
附图说明
9.下面结合附图和具体实施方法对本发明做进一步详细的说明。
10.图1为一种远程诊断平台的结构图;
11.图2为诊断装置的结构示意图一;
12.图3为诊断装置的结构示意图二;
13.图4为诊断装置的结构示意图三;
14.图5为弧面板的结构示意图一;
15.图6为弧面板的结构示意图二;
16.图7为中块、横轴和插柱的结构示意图一;
17.图8为中块、横轴和插柱的结构示意图二;
18.图9为竖架的结构示意图。
19.图中:弧面板101;弧棱102;橡胶边103;握柱104;挡片105;橡胶绳106;滑块107;圆杆108;门架109;支脚110;
20.中块201;扳杆202;竖轴203;滑孔204;推杆205;伸缩杆i206;摄像头i207;
21.横轴301;凸棱302;插孔303;凸点304;转轮305;侧片306;
22.插柱401;挡头402;
23.竖架501;电机502;滑座503;伸缩杆ii504;滑柱505;伸缩杆iii506;插销507;压片508;伸缩杆iv509;摄像头ii510;伸缩杆v511。
具体实施方式
24.如图5-6所示,这个例子可以实现使得患者的小臂固定设置在诊断装置上的效果。
25.由于远程诊断平台包括医生端、患者端和诊断装置,诊断装置通过usb连接线连接在患者端,患者端通过互联网连接在医生端;诊断装置包括弧面板101、弧棱102和橡胶边103,弧面板101的后部粘接有橡胶边103,弧面板101的上侧从前至后设置有多个弧棱102,使用远程诊断平台时,患者的小臂需要放置在弧面板101上,患者的手腕处需要放置在橡胶边103上,橡胶边103比较柔软,使得患者的手腕部更加舒服,多个弧棱102可以防止患者的小臂相对弧面板101前后移动,使得患者的小臂固定设置在诊断装置上,便于医生观察固定的小臂,然后诊断装置上设置有现有技术中的录像装置,录像装置将患者图像传递给患者端,患者端通过互联网将患者图像传递给医生端,医生通过医生端观察患者的影像,使得医生可以对患者进行诊断。
26.如图5-6所示,这个例子可以实现对弧面板101进行支撑的效果。
27.由于诊断装置还包括支脚110,弧面板101下侧的前后两端均通过螺钉连接有支脚110,支脚110可以对弧面板101进行支撑。
28.如图5-6所示,这个例子可以实现使得患者的小臂可以贴合在弧面板101上的效果。
29.由于诊断装置还包括握柱104、挡片105、橡胶绳106、滑块107、圆杆108和门架109,门架109设置在弧面板101的下侧,门架109的两端均焊接有圆杆108,每个圆杆108的上部均焊接有挡片105,多个握柱104通过一个橡胶绳106穿在一起,橡胶绳106的两端均固定连接有滑块107,两个滑块107分别滑动连接在两个圆杆108上,每个圆杆108上均套接有压缩弹簧i,每个压缩弹簧i均位于对应的挡片105和滑块107之间,患者的手需要握在多个握柱104上,使得患者的手部保持一个正确的位置,进而使得患者的小臂在弧面板101上保持有一个正确的位置,便于医生观察患者皮肤,多个握柱104可以通过橡胶绳106的形变改变排列形状,进而使得患者的手部握持时更加舒适,两个压缩弹簧i分别给两个滑块107向下的弹力,使得橡胶绳106和多个握柱104始终有向下移动的趋势,进而带动患者的手部向下移动,使得患者的小臂可以贴合在弧面板101上。
30.如图5-6所示,这个例子可以实现使得患者的手部具有一个合适的握持位置的效果。
31.由于门架109在前后方向上滑动连接在弧面板101的下侧,弧面板101的下侧通过螺纹连接有紧固螺丝,紧固螺丝压在门架109上将门架109固定,可以通过门架109在弧面板101下侧前后滑动调整橡胶绳106和多个握柱104的前后位置,使得患者的手部具有一个合
适的握持位置。
32.如图7-8所示,这个例子可以实现通过转轮305上的多个凸点304对患者的小臂进行按摩的效果。
33.由于诊断装置还包括凸点304和转轮305,转轮305设置有两个,两个转轮305左右设置,每个转轮305的外周均呈环形设置有多个凸点304,凸点304和转轮305均为橡胶材质,转轮305设置在弧面板101的上方。在观察患者的手腕和小臂皮肤时,可以先对患者的小臂进行按摩,这时使得两个转轮305在患者的小臂处前后滚动,进而通过转轮305上的多个凸点304对患者的小臂进行按摩,使得皮肤血液循环更加流畅,使得医生更加容易观察患者的皮肤的情况。
34.如图7-8所示,这个例子可以实现驱动两个转轮305在人的小臂处进行滚动的效果。
35.由于诊断装置还包括横轴301和凸棱302,横轴301上设置有轴向的凸棱302,两个转轮305的中心分别插在横轴301的左右两端,两个转轮305均可以在横轴301和凸棱302上左右滑动,进而调整两个转轮305之间的间距,进而调整将两个转轮305的位置使得两个转轮305压在小臂上的不同左右位置,充分对小臂处的皮肤进行按摩,横轴301转动时可以通过凸棱302驱动两个转轮305转动,进而驱动两个转轮305在人的小臂处进行滚动。
36.如图7-8所示,这个例子可以实现使得两个转轮305之间始终有相互靠近的趋势的效果。
37.由于诊断装置还包括侧片306,横轴301的左右两端均通过螺钉连接有侧片306,横轴301的左右两端均套接有压缩弹簧ii,两个压缩弹簧ii分别位于两个转轮305的外侧,两个压缩弹簧ii分别给两个转轮305向内滑动的力,使得两个转轮305之间始终有相互靠近的趋势。
38.如图7-8所示,这个例子可以实现推动两个转轮305之间相互远离或者靠近的效果。
39.由于诊断装置还包括中块201、推杆205、伸缩杆i206和摄像头i207,横轴301的中部通过轴承转动连接在中块201的下部,中块201的下端连接有摄像头i207,中块201的左右两侧均通过螺钉连接有伸缩杆i206,两个伸缩杆i206的外端均通过螺钉连接有推杆205,两个推杆205分别顶在两个转轮305的内侧上部,摄像头i207可以进行录像,使得医生可以对患者的小臂处进行近距离观察,两个伸缩杆i206伸长时可以驱动两个推杆205相互远离,进而推动两个转轮305之间相互远离,两个伸缩杆i206缩短时驱动两个推杆205相互靠近,这时两个转轮305由于两个压缩弹簧ii的弹力作用进行回位。
40.如图7-8所示,这个例子可以实现对患者小臂的一处进行针对性局部按摩的效果。
41.由于诊断装置还包括插孔303、插柱401和挡头402,两个转轮305上相对设置有多组插孔303,插柱401的两端能够分别插在两个转轮305上的插孔303上,插柱401的两端均螺纹连接有挡头402。可以在两个转轮305之间安装多条插柱401,这时驱动两个转轮305前后往复短距离滚动,进而这时多条插柱401对患者小臂的一处进行针对性局部按摩,两个挡头402可以防止插柱401脱离两个转轮305。
42.如图7-8所示,这个例子可以实现在人的小臂处进行圆周轨迹按压按摩的效果。
43.由于诊断装置还包括扳杆202和竖轴203,中块201的上部焊接有竖轴203,竖轴203
的上部焊接扳杆202的中部,使得中块201和横轴301可以以竖轴203的轴线为轴转动,进而使得两个转轮305可以以竖轴203的轴线为轴转动,使得两个转轮305在人的小臂处进行圆周轨迹按压按摩,两个转轮305之间的间距越大,这个圆周轨迹的直径越大。
44.所述诊断装置还包括竖架501、电机502、滑座503、伸缩杆ii504、滑柱505、摄像头ii510和伸缩杆v511,竖架501通过螺钉连接在位于后侧的支脚110上,滑座503竖向滑动连接在竖架501上,滑座503通过伸缩杆v511驱动滑动,滑柱505在前后方向上滑动连接在滑座503上,滑柱505通过伸缩杆ii504驱动滑动,竖轴203通过轴承转动连接在滑柱505的前部,滑柱505上通过螺钉连接有电机502,电机502的输出轴上通过螺钉连接有摄像头ii510。
45.如图9所示,这个例子可以实现驱动两个转轮305在人的小臂上滚动的效果。
46.伸缩杆v511伸缩时驱动滑座503在竖架501上竖向滑动,伸缩杆ii504伸缩时可以驱动滑柱505在滑座503上前后滑动,进而驱动中块201和横轴301升降和前后移动,进而驱动两个转轮305升降和前后移动,两个转轮305升降时靠近或者远离人的小臂,两个转轮305前后移动时驱动两个转轮305在人的小臂上滚动。
47.所述诊断装置还包括滑孔204、伸缩杆iii506、插销507、压片508和伸缩杆iv509,滑柱505上通过螺钉连接有伸缩杆iii506,伸缩杆iii506的前部通过螺钉连接有插销507,扳杆202上设置有滑孔204,插销507滑动连接在滑孔204上,滑柱505的前部通过螺钉连接有伸缩杆iv509,伸缩杆iv509的前部通过螺钉连接有压片508,压片508能够压在扳杆202的后侧。
48.如图7-9所示,这个例子可以实现驱动两个转轮305以竖轴203为轴转动的效果。
49.伸缩杆iv509伸长时可以驱动压片508压在扳杆202上,这时中块201无法通过竖轴203在滑柱505上转动,需要驱动两个转轮305在人的小臂处进行圆周轨迹按压按摩时,使得压片508离开扳杆202然后通过伸缩杆iii506伸缩驱动插销507前后移动,进而驱动扳杆202以竖轴203为轴转动,进而驱动两个转轮305以竖轴203为轴转动。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1