用于扫描多个牙齿对象的方法和系统与流程
本公开涉及一种三维光学扫描系统,该三维光学扫描系统被配置为扫描定位在扫描站处的牙齿对象。
背景技术:
1、三维(3d)牙齿扫描仪是用于扫描三维物理牙齿对象以生成牙齿对象的3d数字表示的设备。这是通过响应于牙齿对象的照明而获取三维牙齿对象的多个二维(2d)图像,随后处理所获取的图像以生成三维数字表示来执行的。一种此类三维牙齿扫描仪是台式牙齿扫描仪,其包括放置牙齿对象的扫描站。在扫描期间,移动其上放置有牙齿对象的扫描站并且用探测光照亮牙齿对象。在牙齿扫描仪的相机处获取对应于2d图像的响应于照明而反射的光。然后处理所获取的2d图像以生成牙齿对象的三维数字表示。
2、随着相机和3d牙齿对象相对于彼此移动,相机可以获取3d牙齿对象的2d图像。扫描过程可能需要很长时间,尤其是当3d牙齿对象具有复杂的结构(诸如存在于牙齿印模中)时。
3、基于牙齿对象的多个2d图像生成牙齿对象的可靠3d数字表示所必需的是,牙齿对象的相关方面(即,牙齿信息)在扫描期间被最佳地获取并且在获取的多个2d图像中被表示。在一些情况下,物理牙齿对象可以包括不同的侧,其中一个以上的侧(诸如牙齿印模的相对的侧)包含牙齿信息。使用常规已知的台式扫描仪从不同侧获取牙齿信息是相当低效的。例如,扫描不同的侧可能需要通过用户在扫描站物理地重新定位牙齿对象来进行手动干预,以允许不同的侧对于探测光和相机变得可见。
4、本公开提供了一种用于扫描至少一个三维物理对象的新型光学扫描系统。所公开的光学扫描系统还克服了与现有台式扫描仪相关联的(一个或多个)挑战。
技术实现思路
1、在本技术的上下文中,术语“第一三维牙齿对象”包括三重托盘、包括具有一颗或多颗准备好的牙齿的牙齿的正模型的压模(die)、包括准备好的牙齿的正模型的单个压模、包含多个(单个)压模的多压模、或一些牙齿或一组牙齿的模型(其中该模型可以是石膏牙齿模型)中的任一者。这些牙齿对象表示不同类型的牙齿对象。例如,单个压模表示不同于诸如三重托盘的牙齿对象类型的牙齿对象类型。作为示例,一个或多个单个压模属于同一类别的牙齿对象类型。一个或多个三重托盘属于同一类别的牙齿对象类型,这不同于将一个或多个单个压模分类的牙齿对象类型。类似地,其他牙齿对象可以被分类为不同的牙齿对象类型。
2、在本技术的上下文中,术语“三重托盘”(triple tray)应理解为包括由患者的牙齿制成的印模(impression),优选地,三重托盘包含来自患者上颌和下颌两者的牙齿的印模。
3、本公开提供了一种用于扫描三维牙齿对象的光学扫描系统,其具有改善的扫描工作流程、减少的扫描持续时间,并且可选地整个扫描过程是自动的。这些效果中的一个或多个可以借助于根据权利要求1的系统来实现。
4、根据实施例,公开了一种用于扫描三维牙齿对象的三维光学扫描系统。该系统包括第一扫描站,该第一扫描站被配置为接收第一三维牙齿对象,并且进一步被配置为在扫描期间绕第一轴线旋转;以及成像单元,其包含至少一个相机,并且被配置为在扫描期间绕成像单元轴线旋转。光学扫描系统被配置为使得成像单元获取对应于成像单元和第一扫描站之间的一组预定义的静态相对位置的第一三维牙齿对象的多个二维图像,以生成第一三维牙齿对象的第一三维数字表示。
5、如果扫描站上的3d牙齿对象位置和成像单元在扫描期间相对于彼此移动,从而仅移动扫描站或成像单元中的一者,并且2d图像例如以某一速率经常被捕获,则扫描过程通常可能花费很长时间,并且可能难以从不同侧捕获牙齿信息。相比之下,通过使用一组预定义的静态相对位置,可以优化所获取的2d图像的重叠和获取相同数据以生成第一3d数字表示所需的2d图像的数量两者。这将节省时间,也将减少需要处理的数据量。数据量的减少将进一步减少处理数据所需的时间和功率。如果用于生成第一3d数字表示的2d图像的处理或至少部分处理是在远程中心位置(例如在云中)执行的,则处理时间将减少另一个3d光学扫描系统生成其第一3d数字表示的等待时间。
6、在实施例中,该组预定义的静态相对位置可以选自成像单元和第一扫描站之间的多组预定义的静态相对位置。
7、适用于一个第一3d牙齿对象类型或对其最佳的该组预定义的静态相对位置不一定适用于另一个第一3d牙齿对象类型或对其最佳,并且反之亦然。例如,对于儿童和成人的三重托盘的该组预定义的静态相对位置的集合可能不相同。三重托盘或单个压模的该组预定义的静态相对位置的设置可以变化。该系统可以被配置为为3d牙齿对象选择该组正确的预定义的静态相对位置(如三重托盘或单个压模),并且即使对于相同的牙齿对象,静态相对位置也可以根据诸如年龄、种族等类别而不同。该系统可以包括存储器,该存储器包括不同牙齿对象类型的多个静态相对位置和/或对应于不同类别的不同牙齿对象的静态相对位置,该不同类别表示除对象类型之外的方面,例如诸如年龄的患者特征。对于扫描,该系统可以被配置为使用来自存储器的适用的静态相对位置,例如响应于对将要扫描的第一3d牙齿对象类型的了解,其中年龄或年龄组由系统的用户提供。
8、具有多组预定义的静态相对位置,例如每种类型的第一3d牙齿对象一个组,并且例如对于每种类型的第一3d牙齿对象,每个年龄组和/或每个尺寸组一个组,将使得用户能够选择或系统能够自动确定要扫描的第一3d牙齿对象的该组正确的预定义的静态相对位置,以便在短时间内生成非常好地对应于第一3d牙齿对象的第一3d数字表示。自动确定可以包括从与对象无关的静态相对位置获取定位在扫描站的物理牙齿对象的一组2d测试图像,可选地基于该组2d测试图像生成物理牙齿对象的粗略3d模型并且对该组2d测试图像或可选地对粗略3d模型应用图像识别技术(诸如特征识别技术)以识别牙齿对象的类型。
9、定位在第一扫描站上的第一3d牙齿对象优选地仅旋转而不平移。这在第一3d牙齿对象处于倾斜取向时提供了优势,因为期望在整个扫描过程中保持倾斜。平移可能导致托盘因重力而轻微移动,从而导致2d图像捕获不准确。
10、在实施例中,来自预定义的静态相对位置集合的每个预定义的静态相对位置可以包括第一扫描站绕第一轴线的第一预定义的静态旋转位置与成像单元绕成像单元轴线的第二预定义的静态旋转位置的配对。
11、作为示例,如果第一扫描站的预定义的静态旋转位置包括绕第一轴线的5个静止位置并且成像单元的预定义的静态旋转位置包括绕成像轴线的4个静止位置,则预定义的静态相对位置将包括20个位置(即5×4个位置),在这些位置处捕获待扫描的牙齿对象的多个2d图像。
12、在实施例中,从多组预定义的静态相对位置中选择该组预定义的静态相对位置可以基于第一3d牙齿对象的牙齿对象类型。对应于牙齿对象类型的静态相对位置可以确定成像单元必须从中获取多个2d图像的方向。一种牙齿类型会在某些位置具有凹形表面、凸形表面和平坦表面,并且另一种牙齿类型会在某些其他位置具有凹形表面、凸形表面和平坦表面。凹形表面、凸形表面和平坦表面的位置将决定特定牙齿对象类型的预定义的静态相对位置,以便获取的覆盖牙齿信息的多个2d图像为生成牙齿对象的数字3d表示提供可靠的数据。
13、在实施例中,该组预定义的静态相对位置包括成像单元在绕成像单元轴线的两个极限位置之间的中间预定义的静态旋转位置。成像单元的预定义的静态旋转位置可以另外包括绕成像单元轴线的两个极限位置中的一个或两个,即成像单元在两个极限位置和绕成像单元轴线的两个极限位置中的至少一者之间的中间预定义的静态旋转位置。
14、在实施例中,成像单元被配置为在绕成像单元轴线以预定义角度间隔开的两个极限位置之间移动。两个极限位置相隔至少100°,优选地相隔至少120°,甚至更优选地相隔至少140°,并且最优选地相隔至少160°。成像单元可以移动超过100°甚至超过120°意味着使得在旋转期间成像单元可以移动超过正好在第一扫描站竖直上方的顶部位置。允许成像单元超出该位置允许更快地从第一牙齿对象的不同侧捕获牙齿信息。成像单元绕成像轴线的静态旋转位置包括在顶部位置的任一个侧上的至少一个静态位置。因此,在扫描期间,成像单元被配置为绕成像轴线旋转,使得成像单元与扫描站被配置为绕其旋转的第一轴线相交。
15、在实施例中,两个极限位置基本上对称地远离第一轴线。换句话说,第一极限位置和第一扫描站正上方的顶部位置之间的第一旋转距离等于第二极限位置和第一扫描站正上方的顶部位置之间的第二旋转距离。
16、在实施例中,成像单元的预定义的静态旋转位置中的至少一个和/或第一扫描站的预定义的静态旋转位置中的至少一个可以基于包含对应于第一3d牙齿对象的牙齿对象的先前的情况(previous cases)。在扫描系统可以用于扫描第一3d牙齿对象之前,确定特定牙齿对象类型的预定义的静态相对位置,以便所确定的静态相对位置可以稍后用于扫描相同牙齿对象类型的牙齿对象,这将节省时间。该确定可以是手动的或自动的,诸如使用机器学习。
17、在一个实施例中,手动确定可以基于特定牙齿对象类型的测试牙齿物理对象在相对于测试牙齿物理对象的参考扫描的不同候选静态相对位置的3d数字表示的手动比较。如果手动比较基于包含测试物理牙齿对象的以数字方式生成的3d牙齿模型和参考扫描之间的差异低于可接受值或在一定范围内的标准显示出令人满意的结果,则选择该牙齿对象类型的候选静态相对位置作为相同牙齿对象类型的后续扫描的静态相对位置。
18、在实施例中,可以使用机器学习来确定成像单元的预定义的静态旋转位置中的至少一个和/或第一扫描站的预定义的静态旋转位置中的至少一个。在示例中,可以使用包含输入-输出对的训练数据集。输入-输出对可以包括作为输入数据的特定对象类型的物理牙齿对象和作为输出数据的物理牙齿对象的参考数字扫描,该参考数字扫描用作训练会话的目标数据。使用此牙齿对象的训练数据可以允许识别扫描站和成像单元之间的静态相对位置,从而训练神经网络。在扫描期间,运行经训练的神经网络的扫描系统被配置为在对应于训练会话中使用的对象类型的牙齿对象的静态相对位置处捕获图像。
19、在实施例中,第一扫描站可以包含平台,该平台被配置为在第一取向上接收第一3d牙齿对象。该平台可以是与第一扫描站可分离的部件,该平台被配置为附接到第一扫描站。
20、该平台可以包括具有连接部件的板,该连接部件被配置为夹紧并固定待扫描的牙齿对象的足部部段。优选地,一种牙齿对象类型(例如三重托盘)可以经由以相同的第一取向夹紧而定位在平台上,并且另一个牙齿对象类型(例如单个压模)可以以相同的第二取向定位在平台上,使得在扫描期间,对象的取向相对于定位对象的相应扫描站保持相同。
21、在实施例中,第一扫描站可以包含平台,该平台被配置为在第一取向上接收第一3d牙齿对象,使得基于该组预定义的静态相对位置,暴露包含在第一3d牙齿对象的相对侧的每一侧上的患者牙齿信息或所有患者牙齿信息。例如,具有来自上颌和下颌的患者印模数据的三重托盘可以存在于三重托盘的相对侧上。
22、如果第一3d牙齿对象是具有完整或部分u形形式的三重托盘,其中托盘轴线穿过大体上u形三重托盘的底部中心,则完整u形形式的托盘轴线与大体上u形三重托盘的两个臂上的对应点等距。在一个实施例中,第一取向使得托盘轴线与第一轴线基本上重合或平行。在另一个实施例中,第一取向使得托盘轴线基本上垂直于第一轴线。
23、如果第一3d牙齿对象是具有穿过单个压模中心的对称轴线(例如长轴线)的单个压模,则第一取向使得对称轴线与第一轴线平行(例如重合)或成一角度。
24、在实施例中,第一3d牙齿对象可以是单个压模并且该单个压模在第一取向上的冠状方向可以被大体上向上远离扫描站指引。对称轴线和第一轴线之间的角度可以小于30°,优选地小于20°,更优选地小于10°。
25、在实施例中,第一3d牙齿对象可以是三重托盘并且其中在第一取向上的三重托盘可以具有与第一轴线平行或成一定角度的牙齿中线。在另一个实施例中,第一3d牙齿对象可以是三重托盘并且其中在第一取向上的三重托盘可以具有牙齿中线,该牙齿中线平行于平台布置在其上的扫描站的表面或与该平台布置在其上的扫描站的表面成角度。在任一实施例中,该角度可以小于30°,优选地小于20°,更优选地小于10°。
26、在实施例中,多个预定义的静态相对位置可以包含第一扫描站的预定义的静态旋转位置。相邻的预定义的静态旋转位置可以绕第一轴线以第一角度的离散倍数间隔开。第一角度可以大于10°,优选地大于20°,更优选地大于30°,并且最优选地大于40°,诸如72°。
27、在实施例中,多个预定义的静态相对位置可以包含成像单元的预定义的静态旋转位置。相邻的预定义的静态旋转位置可以绕成像单元轴线以第二角度的离散倍数间隔开。第二角度可以大于10°,优选地大于20°,更优选地大于30°,并且最优选地大于40°,诸如90°。
28、在实施例中,该系统可以被配置为在获取第一3d牙齿对象的多个2d图像期间,当处于相应的预定义的静态旋转位置时,将成像单元和第一扫描站保持在静止状态。在扫描会话期间获取第一3d牙齿对象的2d图像时,成像单元和扫描站被静置于静止状态并且不会相对于彼此移动。这允许所获取的2d图像清晰,因为基于移动的振动或模糊减少了,从而允许可靠的3d模型。
29、在第一扫描站和成像单元之间的每个静态相对位置处,可以获取第一牙齿对象的一个或多个2d图像。每个相对静态位置提供了来自物理牙齿对象的成像单元(例如至少一个相机)的不同观察方向,从而允许从物理牙齿对象捕获不同的牙齿信息。
30、该系统被配置为在改变到获取另外一个或多个2d图像的另一个预定义的静态相对位置之前,获取预定义的静态相对位置的一个或多个2d图像。在一个实施例中,该系统被配置为将成像单元绕成像轴线旋转到预定义的静态旋转位置并且在将成像单元绕成像轴线旋转到后续的预定义的静态旋转位置之前,当成像单元静止在预定义的静态旋转位置时,将第一扫描站绕第一轴线旋转到不同预定义的静态旋转位置并且当成像单元静止在后续的预定义的静态旋转位置时,将第一扫描站绕第一轴线旋转到不同预定义的静态旋转位置。这是有用的,因为与上面放置有牙齿对象的扫描站相比,成像单元通常是较重的单元,并且此方法确保了在扫描期间较重的单元比较轻的扫描站旋转的次数少。在另一个实施例中,该系统被配置为将第一扫描站绕第一轴线旋转到静态旋转位置并且在将第一扫描站绕第一轴线旋转到后续的预定义的静态旋转位置之前,当扫描站静止在静态旋转位置时,将成像单元绕成像轴线旋转到不同预定义的静态旋转位置并且当第一扫描站静止在后续的预定义的静态旋转位置时,将成像单元绕成像轴线旋转到不同预定义的静态旋转位置。这是有用的,因为扫描站包括放置在其上的牙齿对象并且此方法确保牙齿对象在扫描期间旋转较少的次数,从而降低牙齿对象相对于扫描站移动的可能性。
31、在实施例中,成像单元被配置为在将成像单元绕成像单元轴线旋转到后续的预定义的静态旋转位置之前,针对第一扫描站的每个预定义的静态旋转位置获取第一三维牙齿对象的至少一个二维图像。
32、在实施例中,该系统可以被配置为在将第一扫描站移动到另一个位置之前,对于具有第一扫描站的相同位置的该组预定义的静态相对位置中的每一个获取不同的2d图像。由于一些原因,第一3d牙齿对象可能难以牢固地粘附到第一扫描站并且第一3d牙齿对象可能在2d图像的获取期间相对于第一扫描站移动。如果是这种情况,在第一扫描站移动到另一个位置之前,对于成像单元的不同位置和对于第一扫描站的相同位置获取不同的2d图像将会更快。
33、在实施例中,该系统可以被配置为在将成像单元移动到另一个位置之前,对于具有成像单元的相同位置的该组预定义的静态相对位置中的每一个获取不同的2d图像。成像单元通常比第一扫描站重,因此成像单元绕成像单元轴线的移动可能比第一扫描站绕第一轴线的移动慢。因此,如果在成像单元移动到另一个位置之前,针对第一扫描站的不同位置和成像单元的相同位置获取不同的2d图像,将会更快。这一般是有用的,因为第一扫描站四处移动通常比成像单元的旋转花费更短的时间。
34、在实施例中,第一扫描站和/或成像单元的旋转速度可以变化。该系统可以包括振动传感器,该振动传感器被配置为在扫描期间测量扫描站的振动。在实施例中,旋转速度可以从用户接口(如计算机屏幕)改变,特别是当振动信号指示的值超过阈值时。在另一个实施例中,旋转速度可以响应于指示超过阈值的值的振动信号而自动变化。改变第一扫描站和/或成像单元的旋转速度允许在不导致振动和不必要磨损的情况下尽可能快地调谐3d牙齿对象的扫描过程。另外地或替代地,如果振动信号超过阈值,这也可能是因为牙齿对象没有适当地粘附到第一扫描站。因此,如果振动信号超过阈值,则可以重新附接第一牙齿对象以将对象更牢固地粘附在第一扫描站上。如上所述,如果第一3d牙齿对象没有很好地粘附到第一扫描站,则优选降低第一扫描站的旋转速度和/或重新附接第一3d牙齿对象。
35、在实施例中,该系统可以进一步包含第一马达和成像单元马达,其中该系统可以被配置为控制第一马达以绕第一轴线旋转第一扫描站并且控制成像单元马达以独立地绕成像单元轴线旋转成像单元。在实施例中,第一马达和成像单元马达是被配置为依次旋转第一扫描站和成像单元的同一马达。
36、在实施例中,该系统可以进一步包含控制单元,该控制单元被配置为控制第一扫描站绕第一轴线的旋转和成像单元绕成像单元轴线的旋转。控制单元可以独立地控制第一马达和/或成像单元马达。
37、在实施例中,对于成像单元的每个预定义的静态旋转位置,控制单元被配置为指示第一马达将第一扫描站依次旋转到第一扫描站的多个预定义的静态旋转位置中的每一个。在另一个实施例中,对于扫描站的每个预定义的静态旋转位置,控制单元被配置为指示成像单元马达将成像单元依次旋转到成像单元的多个预定义的静态旋转位置中的每一个。
38、在实施例中,该系统可以进一步包含存储器,该存储器被配置为存储该组预定义的静态相对位置,或优选地存储多组预定义的静态相对位置,其中每组对应于特定于对应于第一3d牙齿对象的牙齿对象类型。可以通过存储另一种类型的第一3d牙齿对象的一组预定义的静态相对位置来更新存储器。
39、该系统被配置为当特定类型的第一3d牙齿对象被定位在第一扫描站上时从存储器中为该特定类型的第一3d牙齿对象选择一组预定义的静态相对位置并且在扫描会话期间控制成像单元和第一扫描站的移动。
40、在实施例中,该系统进一步包含处理器,该处理器被配置为访问存储器并且在扫描期间,响应于对应于第一3d牙齿对象的牙齿对象类型的识别,应用该组存储的静态相对位置。
41、在一个实施例中,第一3d牙齿对象的牙齿对象类型的识别是手动的,用户在用户接口上选择牙齿对象类型。在另一个实施例中,第一3d牙齿对象的牙齿对象类型的识别是自动的。自动确定可以包括从与对象无关的静态相对位置获取定位在扫描站的物理牙齿对象的一组2d测试图像,可选地基于该组2d测试图像生成物理牙齿对象的粗略3d模型并且对该组2d测试图像或可选地对粗略3d模型应用图像识别技术(诸如特征识别技术)以识别牙齿对象的类型。
42、在实施例中,该系统可以进一步包含至少一个光源,该至少一个光源被配置为发射用于照亮所接收到的第一3d牙齿对象的光。在实施例中,例如来自光源的光可以包含被配置为投射到第一3d牙齿对象上的结构化光。结构化光被第一3d牙齿对象反射并且被成像单元获取为第一3d牙齿对象的多个2d图像。该扫描可以通过不同的扫描原理(诸如三角测量、聚焦扫描、共焦技术或任何其他已知的技术)来采用。例如,在基于三角测量的扫描中,成像单元的至少一个光源和至少一个相机之间的已知固定几何关系以及响应于使用结构化光照亮牙齿对象而从牙齿对象获得的结构化光图案的变形,将捕获对应于第一3d牙齿对象的三维形状的2d图像。
43、在实施例中,结构化光可以具有对应于在至少一个光源和第一3d牙齿对象之间的光路中引入的物理结构中的至少一个的图案。替代地,结构化光可以是以数字方式生成的光图案。甚至可以基于表示至少一个光源的一个以上光源的相对布置来生成结构化光。光源的布置可以创建图案。led阵列可以例如被布置成使得led阵列一起形成更强的光和更弱的光的图案。
44、在实施例中,该系统包括第二处理器,该第二处理器被配置为通过处理多个二维图像来生成经处理的数据。第二处理器可以是扫描仪的一部分并且可以包括准备获取的2d图像以用于例如传输到第三处理器的处理。基于经处理的数据生成第一三维牙齿对象的第一三维数字表示。
45、在实施例中,该系统可以包含第三处理器,该第三处理器可以是远离包含成像单元和扫描站的扫描仪的处理器。第三处理器被配置为基于由第二处理器生成的多个二维图像或经处理的数据生成第一三维牙齿对象的第一三维数字表示。多个二维图像或经处理的数据可以通过已知的拼接(也称为配准)过程转换成3d数字表示。迭代最近点(icp)算法被广泛用于此目的。第三处理器可以是远程处理器并且优选地是云中的远程处理器,如果多个2d图像的处理在计算上非常密集,这将是特别有利的。
46、在实施例中,第一轴线可以基本上竖直于扫描站的表面。第一轴线在系统的使用期间可以是基本上竖直的,这确保了在绕第一轴线旋转的期间,影响3d牙齿对象的重力效应被最小化。
47、在实施例中,该系统可以包含基站,该基站包含布置在该基站上的第一扫描站,其中该基站被配置为绕第三轴线旋转。
48、在实施例中,第一扫描站距离第三旋转轴线固定距离。当第一扫描站绕第一轴线旋转并且基站绕第三轴线旋转时,第一扫描站保持在离第三旋转轴线的固定距离处。
49、在实施例中,固定距离是沿着基站的侧表面的最短距离,其中侧表面可以包含第一扫描站可以布置在其上的表面。
50、在实施例中,第一扫描站和第三旋转轴线之间的固定距离可以包含第一轴线和第三轴线之间的最短距离。
51、在实施例中,第一轴线和第三轴线可以基本上平行。
52、在实施例中,该系统可以包含第二扫描站,该第二扫描站布置在基站上,该第二扫描站被配置为接收第二3d牙齿对象并且在扫描第二3d牙齿对象期间绕第二轴线旋转。第一扫描站和第二扫描站可以接收相互关联的牙齿对象,即与同一患者相关的牙齿对象(三重托盘和单个压模),以便在开始扫描其中一个牙齿对象之后,第一牙齿对象和第二牙齿对象两者可以在相同的过程中优选地自动地(即没有任何人工干预)被扫描。这样,用户就不必在扫描期间控制系统,而可以将他或她的时间用在其他更重要的事情上。第二扫描站可以具有如关于第一扫描站所描述的实施例中的任一个和/或任意组合和/或所有。
53、如前所述,静态相对位置取决于牙齿对象类型。因此,定位在第一扫描站上的第一牙齿对象的静态相对位置可能至少部分地不同于定位在第二扫描站上的第二牙齿对象的静态相对位置。
54、在实施例中,第二扫描站可以与第一扫描站相距固定距离,该固定距离由第一轴线和第二轴线之间的距离定义。
55、在实施例中,第一轴线和第二轴线可以基本上平行。
56、在实施例中,第一扫描站可以包含第一扫描站表面,该第一扫描站表面被配置为接收第一3d牙齿对象,其中第一轴线和第一扫描站表面的法线可以至少基本上平行。
57、在实施例中,第一轴线可以不平行于成像单元轴线。
58、在实施例中,第一轴线可以基本上垂直于成像单元轴线,这意味着可以获取第一3d牙齿对象的所有感兴趣区域的2d图像,其中成像单元正好在该区域上方。
59、在实施例中,可以防止第一扫描站绕垂直于第一轴线的轴线旋转。
60、在实施例中,第一扫描站可以被限制为仅绕第一轴线和/或第三轴线旋转。
61、在实施例中,基站可以被限制为仅绕第三轴线旋转。
62、在实施例中,成像单元可以被限制为仅绕成像单元轴线旋转。
63、在实施例中,成像单元可以被配置为在扫描期间通过成像单元绕成像单元轴线的旋转来定义扫描体积。
64、在实施例中,预定义的静态相对位置可以包含成像单元的预定义的静态旋转位置,该成像单元的预定义的静态旋转位置与第一扫描站的预定义的静态旋转位置可操作地配对,其中所定义的扫描体积可以包含多个单独的扫描体积,其中每个单独的扫描体积可以对应于成像单元的多个预定义的静态旋转位置中的每个预定义的静态旋转位置。
65、在实施例中,扫描体积可以包含定位在沿着绕该成像单元轴线的旋转路径的多个预定义的静态旋转位置处的该成像单元的视野。
66、在实施例中,成像单元可以包含两个或更多个相机;并且扫描体积可以包含两个或多个相机的至少部分重叠的视野。
67、在实施例中,已知两个或更多个相机的位置,可以使用三角测量来确定3d牙齿对象的表面水平的位置。像至少一个相机一样的成像单元,并且至少一个光源可以相对于彼此处于预定义的空间关系。
68、扫描体积可以包括两个或更多个相机的至少部分重叠的视野,其中扫描体积可以对应于第一3d牙齿对象的体积。
69、在实施例中,成像单元可以被配置为捕获结构化光的投影图案和/或其变形,其中捕获的投影图案和/或其变形可以对应于成像单元和第一扫描站之间的静态相对位置和预定义空间关系。
70、在实施例中,第三马达被配置为绕第三轴线旋转基站。
71、第三马达可以是第一马达和/或第二马达,以便一个马达可以驱动基站和第一扫描站和/或第二扫描站两者。控制单元可以通过使马达与第一扫描站、第二扫描站或与基站中的至少一者接合来控制哪一者。
72、在实施例中,控制单元可以被配置为控制第三马达以防止在扫描第一3d牙齿对象期间基站绕第三轴线旋转。
73、在实施例中,光学扫描系统(例如控制单元)可以被配置为控制第三马达以绕第三轴线旋转基站,从而在获取在第一扫描站接收到的第一3d牙齿对象的多个2d图像之后,将第二扫描站带入扫描体积内。
74、在实施例中,基站可以被配置为在第一3d牙齿对象或第二3d牙齿对象的扫描期间(即,当通过将成像单元和扫描站放置在静态相对位置来进行牙齿对象的扫描时)是静止的。
75、在实施例中,该系统可以被配置为使得在预定义的静态相对位置处,扫描体积内的成像单元的焦点可以被限制到定位在第一扫描站和/或基站的仅部分的第一3d牙齿对象。
76、在实施例中,该系统可以包含部分开放结构,该结构包含一个或多个侧表面和至少一个开口。该至少一个开口包括扫描仪表面缺失的至少一侧。该开口中的至少一个被配置为允许将第一牙齿对象或第二牙齿对象中的至少一者相应地定位在第一扫描站或第二扫描站。
77、在实施例中,该系统包含部分开放结构,该部分开放结构包含一个或多个表面和至少一个开口,成像单元包含至少一个光源。该系统可以被配置用于控制成像单元,使得在成像单元绕成像单元轴线的旋转期间,来自至少一个光源的光可以被限制为朝向部分开放结构的一个或多个表面指引(诸如朝向一个或多个侧表面和基站指引),和/或成像单元的视野可以被限制为朝向部分开放结构的一个或多个表面面向,诸如仅朝向一个或多个侧表面和基站指引。
78、术语“被限制为被指引”可以被定义为非绝对的限制,因为会有来自开放侧(诸如至少一个开口)的杂散光,但是定位可以使得限制杂散光。
79、术语“被限制为面对”可以被定义为与成像单元的至少一个相机的焦点相关。
80、在实施例中,控制单元可以被配置为控制第三马达以绕第三轴线旋转基站,使得在扫描第一3d牙齿对象之前,多个扫描站中的第一扫描站可以被带入扫描体积内。
81、在实施例中,光学扫描系统可以被配置为绕第三轴线旋转基站以将第一扫描站和第二扫描站依次带入扫描体积内;并且其中该光学扫描系统可以被配置为使得该成像单元获取对应于该成像单元和该第二扫描站之间的第二组预定义的静态相对位置的该第二3d牙齿对象的多个第二2d图像,用于生成该第二3d牙齿对象的第二3d数字表示。
82、在实施例中,与第一组预定义的静态相对位置相比,该组预定义的静态相对位置和第二组预定义的静态相对位置可以相同或至少部分地不同。
83、在实施例中,处理器可以被配置为基于第二3d牙齿对象的多个第二2d图像生成第二3d牙齿对象的第二3d数字表示。
84、在实施例中,第一3d牙齿对象和第二3d牙齿对象通常对应于同一患者并且可以是所述同一患者的三重托盘印模和单个压模。
85、根据实施例,公开了一种用于扫描三维牙齿对象的三维光学扫描系统。该系统包括:基站,其被配置为在至少一个位置接收三维牙齿对象;以及成像单元,其包含至少一个相机并且被配置为在扫描牙齿对象期间绕成像单元轴线旋转。光学扫描系统被配置为使得当三维牙齿对象处于用于生成三维牙齿对象的三维数字表示的至少一个位置时,成像单元获取对应于成像单元绕成像轴线的一组预定义的静态旋转位置的三维牙齿对象的多个二维图像。三维牙齿对象可以包括其中放置有患者的上颌和/或下颌模型的物理牙齿咬合架。在两个颌都放置在咬合架中的情况下,上颌和下颌以定义患者颌的咬合的咬合关系布置。在一个实施例中,该至少一个位置可以包括处于躺下位置的牙齿咬合架,其中物理牙齿咬合架的铰链轴线在空间上分离并且平行或不平行于成像单元轴线。在另一个实施例中,该至少一个位置可以包括处于躺卧位置的牙齿咬合架,使得成像单元在第一极限位置面向放置在物理牙齿咬合架中的患者上颌和/或下颌模型的一个象限中的后牙并且成像单元在第二极限位置面向放置在物理牙齿咬合架中的患者上颌和/或下颌模型的另一个象限中的后牙。该至少一个位置使得在成像单元绕成像单元轴线的旋转期间,成像单元从第一极限位置移动到第二极限位置并且成像单元的至少一个相机聚焦在该象限和另一个象限中的不同牙齿上。该至少一个位置可以包括i)第一位置,其中在牙齿咬合架的平躺位置,该象限中的后牙更靠近扫描仪的侧表面,并且另一个象限中的后牙远离扫描仪的侧表面,以及ii)第二位置,其与第一位置分离180度,即第二位置,其中在牙齿咬合架的躺下位置,另一个象限中的后齿更靠近扫描仪的侧表面,并且该象限中的后齿远离扫描仪的侧表面。光学扫描系统被设计成使得沿着成像单元绕成像单元轴线的旋转路径在基站和成像单元之间的距离大于牙齿咬合架的宽度。该宽度可以包括当牙齿咬合架在基站上处于平躺位置时,从基站到朝向成像单元的牙齿咬合架的最远点的距离。基站可以包括可拆卸的至少一个扫描站,诸如前面公开的第一扫描站或第二扫描站。因此,同一扫描仪可以与扫描站结合使用,以扫描相互关联的牙齿对象,如前面所描述的。本领域技术人员将会理解,可以在此实施例中采用先前描述的一个或多个实施例。例如,扫描仪包含部分开放结构,该部分开放结构包含一个或多个表面和至少一个开口,成像单元马达被配置为旋转成像单元,来自至少一个光源的光可以被限制为朝向一个或多个表面指引等。
86、扫描过程
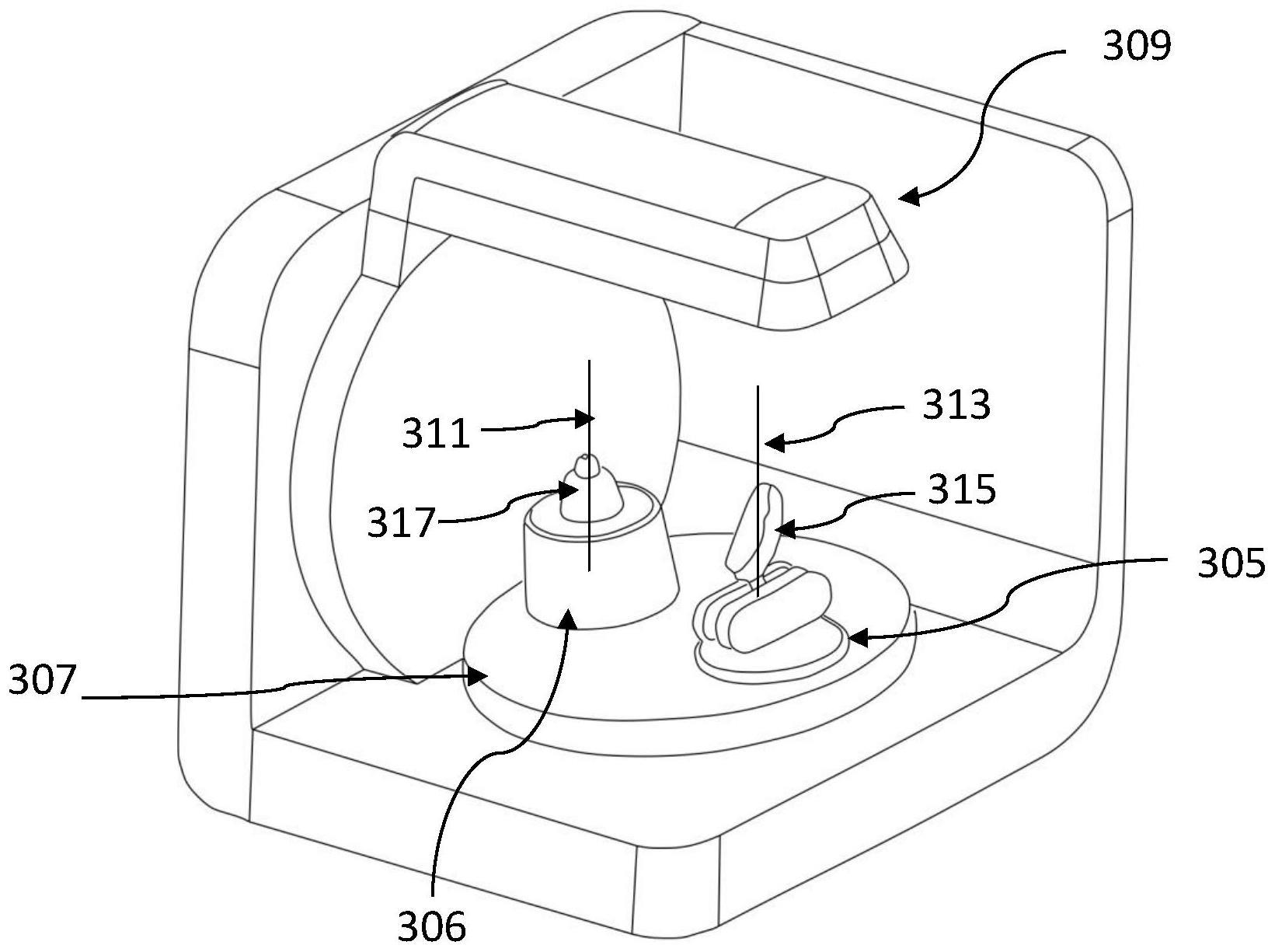
87、在实施例中,第一牙齿对象可以包括在两个相对侧上具有牙齿信息的三重托盘并且以第一取向定位在第一扫描站处。在第一牙齿对象的扫描期间,当具有第一3d牙齿对象的第一扫描站和成像单元处于对应于第一牙齿对象类型的不同静态相对位置时,通过获取第一牙齿对象的一个或多个2d图像来扫描第一3d牙齿对象(例如三重托盘)的每侧。例如,成像单元被带到绕成像轴线的第一预定义的静态旋转位置。在第一预定义的静态旋转位置处,包含至少一个相机的成像单元被配置为获取第一扫描站绕第一轴线的不同的预定义的静态旋转位置中的每一个的一个或多个2d图像。此后,成像单元被带到绕成像轴线的后续的预定义的静态旋转位置,直到成像单元被绕成像轴线旋转到所有预定义旋转位置。在后续的预定义的静态旋转位置中的每一个处,包含至少一个相机的成像单元被配置为获取第一扫描站绕第一轴线的不同的预定义的静态旋转位置中的每一个的一个或多个2d图像。所获取的第一牙齿对象的2d图像用于生成第一牙齿对象的3d数字表示。
88、另外,第二扫描站可以进一步包括第二牙齿对象,诸如与第一牙齿对象相关的单个压模,即用于同一患者。基站被配置为在获取第一牙齿对象的多个2d图像之后(例如当获取对应于第一牙齿对象类型的静态相对位置的一个或多个2d图像时),优选地自动地绕第三轴线旋转以将包含第二牙齿对象的第二扫描站带入扫描体积内。对第一牙齿对象的扫描是否完成的确定可以以不同的方式执行,例如,系统可以被配置为确定是否获取了对应于第一牙齿对象的所有静态相对位置的2d图像,或系统可以被配置为确定或可以手动确定第一牙齿对象的3d数字表示是否令人满意。前者更快,因为第二牙齿对象的扫描不需要等待第一牙齿对象的数字表示的生成,然而就评估过程而言后者可能更可靠。
89、在第二牙齿对象的扫描期间,当具有第二3d牙齿对象的第二扫描站和成像单元处于对应于第二牙齿对象类型的不同静态相对位置时,通过获取第二牙齿对象的一个或多个2d图像来扫描第二3d牙齿对象的每侧。例如,成像单元被带到绕成像轴线的第一预定义的静态旋转位置。在第一预定义的静态旋转位置处,包含至少一个相机的成像单元被配置为获取第一扫描站绕第一轴线的不同的预定义的静态旋转位置中的每一个的一个或多个2d图像。此后,成像单元被带到绕成像轴线的后续的预定义的静态旋转位置,直到成像单元被绕成像轴线旋转到所有预定义旋转位置。在后续的预定义的静态旋转位置中的每一个处,包含至少一个相机的成像单元被配置为获取第一扫描站绕第二轴线的不同的预定义的静态旋转位置中的每一个的一个或多个2d图像。所获取的第二牙齿对象的2d图像用于生成第二牙齿对象的3d数字表示。
90、成像单元可以包括恒温器,该恒温器被配置为测量成像单元内部的温度。温度必须在校准后的几度内保持稳定,因为热膨胀会对成像的光学器件产生负面影响,并且由此影响扫描精度。为此,成像单元内部的风扇冷却成像单元的led和处理单元两者。在接通“冷”扫描仪后,成像单元内的加热器可以用于快速达到热平衡。恒温器、风扇和/或加热器可以布置在系统内,诸如在成像单元、基站和/或侧表面中。当将元件放置在基站中和/或侧表面中时,系统可以包括风和/或热引导装置,该风和/或热引导装置被配置为将风和/或热相应地从风扇和加热器引导到成像单元的光学器件。引导装置可以是管或加热丝。
91、成像单元的光学器件,诸如至少一个相机,可以在校准温度下被校准,并且该温度被存储在系统的存储器中。然后,系统的处理器可以被配置为控制恒温器。
92、系统的振动可以分成至少两组,第一组包括由可移动部件导致的内部振动,并且第二组包括由扫描仪周围的振动导致的外部振动。当摆动单元臂转动到新位置并且停止时,振动施加到臂上,并且然后施加到成像单元上,并且因此,在臂已经定位之后立即开始扫描是不合适的。由此,处理器被配置为在臂已经定位之后延迟扫描的开始。处理器可以被配置为在成像单元被旋转到静态位置之后,将扫描的启动延迟一个延迟周期。延迟时间应是至少25毫秒、至少50毫秒、至少1秒、至少2秒或至少4秒、或至少8秒。延迟是为了防止光阑(stop)导致的振动干扰扫描。
- 还没有人留言评论。精彩留言会获得点赞!